Изобретение относится к механизмам и приборам с многократным резервированием за счет работы от двух двигателей для суммирования угловых перемещений и может использоваться в авиационных и космических летательных аппаратах (например, в антенных установках).
Известен привод, в котором для вращения ведомого вала от двух двигателей используется дифференциальная передача с двумя подвижными центральными цилиндрическими колесами, имеющими общую геометрическую ось с водилом (ведомым валом) [Проектирование механических передач. Учеб. пособие / С.А. Чернавский, С.Л. Самсонович и др. - 7-е изд., перераб. и доп.- М.: ИНФРА-М, 2013. - 536 с., стр. 137-142].
Наиболее близким по технической сущности к изобретению является привод, содержащий два двигателя с параллельными осями валов противоположного вращения и дифференциал с цилиндрическими центральными колесами наружного и внутреннего зацепления, кинематически связанные каждое с одним из валов двигателей посредством цилиндрических колес, ширина каждого из центральных колес дифференциала выбрана из условия их одновременного взаимодействия с сателлитами и цилиндрическими колесами двигателя [описание изобретения к патенту Российской Федерации №2016288 С1, кл. F16H 1/38, 1994].
Данный привод имеет следующий существенный недостаток.
Утверждается, что: [стр. 3, п. 45] «если работает только двигатель 1, а вал двигателя 2 с цилиндрическим колесом 8 заторможен, то центральное колесо 4 неподвижно. Движение передается …» (далее идет описание работы планетарной передачи с заторможенным корончатым колесом 4); [стр. 3, п. 55] «если движение передается от двигателя 2, а вал двигателя 1 с цилиндрическим колесом 7 заторможен, то центральное колесо 3 неподвижно. Движение передается …» (далее идет описание работы планетарной передачи с заторможенным центральным колесом 3).
Таким образом, авторы, обосновывая работу привода, исходят из предположения, что при отказе одного из двигателей его вал с цилиндрическим колесом «заторможен». Однако при отказе двигателя его вал может быть заторможен только по одной причине: заклинивание ротора электродвигателя. Из источников, например (http://www.agrovodcom.ru/elektrodvigatel/info_neispravnosti-jelektrodvigatelej.php, «Основные причины отказов электродвигателей») можно утверждать, что основные причины отказов (сгорела одна из обмоток, вышел из строя предохранитель, разорвалась цепь подачи напряжения и т.д.) приводят не к заклиниванию валов электродвигателей, а наоборот, к их свободному вращению.
Таким образом, в большинстве случаев при выходе из строя любого из двигателей 1 или 2 соответствующие колеса 7 или 8 не будут заторможены и весь механизм будет неработоспособен.
Следует отметить, что даже при обоих работающих двигателях для удержания выходного вала привода в рабочем состоянии под действием вращающего момента со стороны нагрузки оба двигателя должны находиться под напряжением, т.е. потреблять электроэнергию.
Задача изобретения - повышение надежности работы привода. Технический результат - сохранение работоспособности привода при выходе из строя любого из двигателей по любой причине.
Заявленный технический результат достигается тем, что в известном приводе, содержащем два двигателя с параллельными осями валов и дифференциал с цилиндрическими центральными колесами наружного и внутреннего зацепления, кинематически связанные каждое с одним из валов двигателей посредством цилиндрических колес разного диаметра, ширина каждого из центральных колес дифференциала выбрана из условия их одновременного взаимодействия с сателлитами и цилиндрическими колесами двигателя, согласно заявляемому изобретению между ними и цилиндрическими колесами разного диаметра установлены механизмы однонаправленного движения.
На чертеже изображена кинематическая схема привода резервированного самостопорящегося.
Привод резервированный самостопорящийся содержит два двигателя 1 и 2 и дифференциал с цилиндрическими центральными колесами наружного 3 и внутреннего 4 зацеплений, сателлиты 5, водило 6, кинематическая связь двигателей 1 и 2 с цилиндрическими колесами 7 и 8 осуществляется через механизмы однонаправленного действия 9 и 10 соответственно, колеса 7 и 8 имеют числа зубьев, обеспечивающие в своей кинематической цепи определенные передаточные отношения, а ширина каждого из центральных колес 3 и 4 выбирается из условия их одновременного взаимодействия с сателлитами 5 и цилиндрическими колесами 7 и 8.
Привод резервированный самостопорящийся работает следующим образом. Если работают оба двигателя 1 и 2, то они оба являются ведущими и через механизмы однонаправленного действия 9 и 10, колеса 7 и 8 передают вращающие моменты центральным колесам 3 и 4, цилиндрический дифференциал суммирует их угловые скорости и на выходе водила 6 получаем суммарную угловую скорость с учетом общего передаточного числа и мощности обоих двигателей. При достижении заданного углового положения выходного вала водила 6 оба двигателя 1 и 2 могут быть отключены и для удержания выходного вала привода в рабочем состоянии под действием вращающего момента со стороны нагрузки не будут потреблять электроэнергию.
Если вышел из строя двигатель 1, механизм однонаправленного действия 9 не дает возможности передать обратное движение от колеса 7 на вал двигателя 1, колесо 7, а также центральное колесо 3 затормаживаются, дифференциал работает только от двигателя 2 как планетарная передача с ведущим центральным корончатым колесом 4.
Если вышел из строя двигатель 2, механизм однонаправленного действия 10 не дает возможности передать обратное движение от колеса 8 на вал двигателя 2, колесо 8, а также центральное колесо 4 затормаживаются, дифференциал работает только от двигателя 1 как планетарная передача с ведущим центральным колесом 3.
Таким образом, привод резервированный самостопорящийся не выйдет из строя, по какой бы причине ни произошел отказ любого электродвигателя. В качестве механизмов однонаправленного действия могут быть применены, например, муфты необратимого движения и передачи, обладающие свойством самоторможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД | 1991 |
|
RU2016288C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| ПРИВОД МАШИНЫ | 2011 |
|
RU2457378C1 |
| Резервированный следящий электрический привод | 2020 |
|
RU2750811C1 |
| Привод | 1987 |
|
SU1514991A1 |
| Привод распределителя шихты загрузочного устройства доменной печи | 1987 |
|
SU1452843A1 |
| Двухступенчатая коробка передач для транспортного средства | 1989 |
|
SU1717420A1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА АВТОМОБИЛЯ | 1991 |
|
RU2006383C1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С ПЕРЕМЕННОЙ СКОРОСТЬЮ | 2003 |
|
RU2247271C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |

Изобретение относится к механизмам и приборам с многократным резервированием за счет работы от двух двигателей для суммирования угловых перемещений и может использоваться в авиационных и космических летательных аппаратах. Привод резервированный самостопорящийся содержит два двигателя 1 и 2 с параллельными осями валов и дифференциал с цилиндрическими центральными колесами 3 и 4 наружного и внутреннего зацепления, кинематически связанные каждое с одним из валов двигателей 1 и 2 посредством цилиндрических колес 7 и 8. Ширина каждого из колес 3 и 4 дифференциала выбрана из условия их одновременного взаимодействия с сателлитами 5 и цилиндрическими колесами 7 и 8 двигателя. Между двигателями 1 и 2 и колесами 7 и 8 разного диаметра установлены механизмы однонаправленного движения 9 и 10. Изобретение направлено на повышение надежности работы привода при выходе из строя любого из двигателей по любой причине. 1 ил.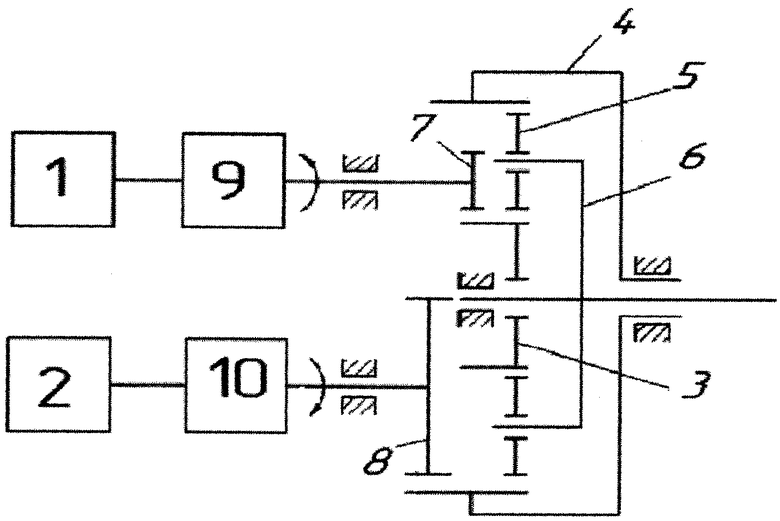
Привод резервированный самостопорящийся, содержащий два двигателя с параллельными осями валов и дифференциал с цилиндрическими центральными колесами наружного и внутреннего зацепления, кинематически связанные каждое с одним из валов двигателей посредством цилиндрических колес, ширина каждого из центральных колес дифференциала выбрана из условия их одновременного взаимодействия с сателлитами и цилиндрическими колесами двигателя, отличающийся тем, что с целью повышения надежности работы привода при выходе из строя любого из двигателей по любой причине между ними и цилиндрическими колесами разного диаметра установлены механизмы однонаправленного движения.
| RU 20166288 C1, 15.07.1994 | |||
| Планетарный распределитель момента | 1984 |
|
SU1231303A1 |
| ПРИВОД МАШИНЫ | 2011 |
|
RU2457378C1 |
| US 20120270690 A, 25.10.2012 | |||
| US 6688924 B1, 10.02.2004 | |||
| СПОСОБ ИСПОЛЬЗОВАНИЯ ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ ИЛИ ДВИЖИТЕЛЯ ПОД ВОДОЙ | 2017 |
|
RU2661633C1 |

