Изобретение относится к электротехнике и может быть использовано для привода различного вида плунжерных насосов, например, в нефтяной промышленности, для различного вида толкателей, в устройствах открывания и закрывания дверей и т.д.
Известен линейный двигатель с катящимся ротором, содержащий тележку с ходовыми колесами и рамой, установленный на раме индуктор, выполненный в виде двух секций с направляющими роликами, между которыми расположен вторичный элемент в виде гибкой ленты, которая выполнена замкнутой и охватывающей ходовые колеса (авт.св. N 1539916, кл. Н 02 К 41/025, 1990).
Недостаток - сложность конструкции и невысокие удельные массогабаритные показатели.
Известен (прототип) линейный электродвигатель с катящимся ротором, содержащим опору с установленной вдоль нее индуктором и ротор-колесом взаимодействующим с индуктором и перемещающимся по опоре (патент США N 3555380, кл. Н 02 К 41/06, 1971).
Недостаток - невысокие энергетические показатели и низкий передаваемый момент.
Цель (технический результат) заявленного - повышение энергетических показателей и улучшение массогабаритных показателей.
Технический результат в заявленном достигается тем, что в линейном двигателе с катящимся ротором, содержащим подвижный элемент в виде перемещающегося по опоре колеса, взаимодействующего с неподвижно установленным статором, последний установлен со стороны, противолежащей опоре, а точка приложения момента от колеса к рабочему органу расположена по диаметральной линии, соединяющей центр колеса и точку контакта колеса с опорой.
Кроме этого предусмотрено, что:
между статором и колесом установлено в направляющих механическое звено в виде подвижного бруса, у которого сторона, обращенная к колесу, имеет с ним механическое зацепление, а сторона, обращенная к статору, имеет с ним электромагнитное зацепление;
электромагнитное зацепление выполнено посредством плоского статора и плоского ротора;
электромагнитное зацепление выполнено посредством магнитной "винт-гайки", причем подвижный брус ("гайка") снабжен желобообразным ротором, а статор ("винт") выполнен в виде вращающегося цилиндра, закрепленного в подшипниках,
линейный двигатель содержит по крайней мере два колеса, а упомянутый подвижный брус имеет механическое зацепление с обоими колесами;
центры колес соединены между собой механической связью, например, в виде рейки, причем рейка связана с неподвижно закрепленной шестерней;
неподвижно закрепленная шестерня связана с дополнительной подвижной рейкой, которая соединена с рабочим органом;
неподвижно закрепленная шестерня выполнена со шкивом, на котором закреплен трос, соединенный с рабочим органом;
центры колес соединены между собой гибкой бесконечной связью (например цепью, лентой и т.д.), с которой соединен рабочий орган.
Такое выполнение линейного двигателя с катящимся ротором позволяет улучшить массогабаритные и энергетические показатели, так как:
установка статора со стороны противолежащей опоре (точке касания колеса) и даже при передаче момента с оси колеса мы увеличиваем момент по крайней мере в два раза по сравнению с "чисто" линейным двигателем, а это примерно двойной выигрыш в массогабаритных показателях;
наличие механической передачи между колесом с статором позволяет по сравнению с "чисто" линейным двигателем с катящимся ротором эффективнее использовать площадь статора и увеличить суммарную силу электромагнитного взаимодействия;
зацепление "винт-гайка" позволяет, особенно, при тихоходной передаче, двигатель выполнить быстроходным и тем самым получить более высокие энергетические и массогабаритные показатели.
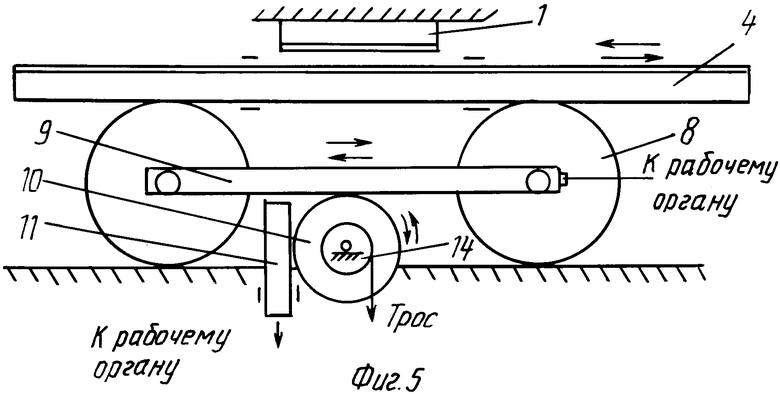
На фиг.1 показана схема двигателя; на фиг.2 - то же, но с промежуточным звеном; на фиг.3 - вид с торца при плоском статоре; на фиг.4 - то же, но при зацеплении "винт-гайка"; на фиг.5, 6 - варианты схем двигателя.
Линейный двигатель с катящимся ротором содержит неподвижно закрепленный статор 1, установленное на опоре 2 катящееся колесо 3, которое электромагнитным путем взаимодействует со статором 1. Между статором 1 и колесом 3 установлено механическое звено 4, которое со стороны статора имеет ротор 5 (электромагнитное взаимодействие), а с колесом 3 имеет механический контакт (зубчатое, цевочное, фрикционное и т.д. зацепление).
Статор 1 может быть плоским или в виде вращающегося цилиндра 6, установленного в подшипниках 7. При этом ротор 5 выполнен желобообразным (фиг. 4), а электромагнитное зацепление осуществляется по типу магнитных, "винт-гайка".
Для повышения эффективности двигателя оно имеет дополнительное колесо 8. При этом оси колеса 3 и 8 могут быть соединены жесткой механической связью, например в виде рейки 9 (с зубчатым цепочным и т.п. зацеплением). Причем рейка 9 взаимодействует с неподвижно закрепленной шестерней 10, которая в свою очередь соединена через эту же шестерню 10 (или дополнительно установленный редуктор) с подвижной рейкой 11, которая в свою очередь соединена с рабочим органом. Возможно также соединение центров колес 3 и 8 посредством гибкой связи 12 в виде цепи гибкой ленты и т.д. При этом рабочий орган связан напрямую с указанной гибкой связью. Все прямолинейно движущиеся элементы расположены в направляющих 13, а шестерня имеет опорную площадку 14.
В качестве линейного двигателя может быть выбран любой из класса известных, удовлетворяющий требованиям двигателя с катящимся ротором.
Линейный двигатель работает следующим образом. При подаче напряжения на статор 1 образуется бегущее магнитное поле, которое, взаимодействуя с колесом 3, перекатывает последнее по опоре 2 и тем самым передает момент рабочему органу. При больших перемещениях момент предпочтительнее передавать с оси колеса 3 и 8 через механическую связь 9, шестерню 10 и подвижную рейку 11 или же посредством гибкой связи 12, т.е. через цепь, гибкую ленту, с которыми связан рабочий орган. Не изменяется принцип pаботы двигателя и при наличии механического звена 4. При этом подвижный ротор 5 плоский или желобообразный взаимодействует со статором 1. Ротор 5 перемещается прямолинейно, а в силу механического сцепления с колесами 3 и 8 перекатывает их. Следует отметить, что при малых перемещениях в пределах части оборота колеса 3 точку передачи момента целесообразно выбрать на диаметральной линии, соединяющей ось колеса с точкой касания колеса к опоре, причем ближе к точке опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ДВИГАТЕЛЬ С КАТЯЩИМСЯ РОТОРОМ | 1990 |
|
RU2016476C1 |
| Дугостаторный привод | 1982 |
|
SU1179492A1 |
| Дугостаторный привод | 1978 |
|
SU752654A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2074491C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2140018C1 |
| Дугостаторный привод | 1978 |
|
SU752653A1 |
| ПЕРЕСТРАИВАЕМЫЙ ГЕНЕРАТОР СВЧ | 1987 |
|
SU1841023A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2022 |
|
RU2786863C1 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
| СИСТЕМА, СОДЕРЖАЩАЯ КОЛЕСО И ПОДВЕСКУ, ВСТРОЕННУЮ В ЭТО КОЛЕСО | 1998 |
|
RU2218279C2 |




Использование: в качестве привода возвратно-поступательного движения, в частности, в устройствах открывания и закрывания дверей. Сущность изобретения: линейный двигатель с катящимся ротором содержит статор 1, установленное на опоре 2 колесо 3. Между статором 1 и колесом 3 установлено механическое звено 4, которое имеет со статором 1 электромагнитное зацепление, а с колесом - механическое зацепление. 5 з.п. ф-лы, 6 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 3555380, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
