Изобретение относится к электронной технике и предназначено для использования в системах автоматизированного управления средствами многоцелевого назначения, в частности в машинах для ликвидации последствий аварий на атомных реакторах.
Известны устройства, анализирующие состояние узлов транспортного средства и сигнализирующие об их техническом состоянии, а также компенсирующие возникающие в них неисправности.
Недостатком их является то, что они не обеспечивают принятие комплекса мер по обнаружению и устранению широкого спектра неисправностей.
Из известных устройств рассматриваемого типа наиболее близким к предлагаемому по технической сущности является устройство для управления и обнаружения неисправностей для автомобилей [1]. Это устройство состоит из аккумуляторной батареи, буферного блока питания, соединенного с микрокомпьютером, входного блока, выходного блока, модуля самодиагностики и вспомогательного блока. В режиме нормальной работы автомобиля управляющая команда водителя или в случае отказа какого-либо узла сигнал от соответствующего датчика поступает через входной блок на микрокомпьютер, который, исходя из своей основной программы, представляющей собой последовательный набор заранее заданных инструкций, формирует сигнал, направляющийся на выходной блок, который преобразует его либо в звуковой сигнал, либо в импульсы световой индикации, либо в непосредственный сигнал от реле на механическое движение какого-либо узла.
Недостатком устройства является то, что оно обладает узкой эффективностью устранения неисправностей в экстремальных ситуациях и как следствие этого не позволяет осуществить комплекс мер по сохранению работоспособности аварийно-спасательного транспортного средства (АСТС) и обеспечению безопасности его экипажа. В этих условиях каждая конкретная ситуация не может быть заранее предусмотрена и, следовательно, описана жестко заданным набором инструкций, по которым действует указанная система. Кроме того, решающим фактором в определенных ситуациях может являться сочетание слаженных действий экипажа АСТС и его автоматических систем. Эта слаженность недостижима в указанной системе ввиду того, что применяемый в ней тип звуковой сигнализации не является информативно емким, а две направленные команды не могут дифференцироваться по разным членам экипажа АСТС.
Целью изобретения является повышение эффективности устранения неисправностей АСТС.
Достигается это тем, что в устройство, содержащее аккумуляторную батарею, соединенную с первым входом буферного блока питания, входной блок, первый вход которого подключен к первому выходу буферного блока питания, а второй вход - к выходу блока датчиков состояния функциональных узлов, блок самодиагностики датчиков, первый вход которого соединен с первым выходом входного блока, а первый выход - с панелью индикации, выходной блок, первый вход которого подключен к второму выходу буферного блока питания, первый выход - к второму входу последнего, а второй выход - к входу блока исполнительных механизмов, управляющий микрокомпьютер, первый вход которого соединен с третьим выходом буферного блока питания, второй вход - с вторым выходом входного блока, третий вход - с вторым выходом блока самодиагностики, четвертый вход - с первым выходом вспомогательного блока восстановления работоспособности, первый выход - с третьим входом буферного блока питания, второй выход - с вторым входом блока самодиагностики, третий выход - с первым входом вспомогательного блока восстановления работоспособности, а четвертый выход - с вторым входом выходного блока, введены блок моделирования развития ситуации, блок диагностики сбоев, блок дешифрации речевой информации, блок синтеза речи и блок коммутации, при этом первый вход блока моделирования развития ситуации соединен с пятым выходом микрокомьютера, второй вход - с вторым выходом вспомогательного блока восстановления работоспособности, третий вход - с первым выходом блока диагностики сбоев, первый выход - с пятым входом микрокомпьютера, а второй выход - с входом блока диагностики сбоев, второй выход которого подключен к второму входу вспомогательного блока восстановления работоспособности, управляющий вход и выход блока дешифрации речевой информации соединен с шестыми соответственно выходом и входом микрокомпьютера, вход блока синтеза речи подключен к седьмому выходу микрокомпьютера, а выход - к первому входу блока коммутации, соединенного вторым входом с восьмым выходом микрокомпьютера.
Введение блока моделирования в устройство обусловлено тем, что в непрогнозируемых заранее аварийных ситуациях моделирование представляется (является) наиболее эффективным способом выработки правильного решения. Блок моделирования связан с блоком его диагностики, чем обеспечено сохранение работоспособности устройства в минимальном объеме функций в случае отказа блока моделирования. Оснащение устройства блоком синтеза речи и блоком коммутации в совокупности с микрокомпьютером обеспечивает раздельную передачу речевой информации для каждого члена экипажа. Блок дешифрации служит для приема устройством речевой информации от членов экипажа.
На чертеже приведена структурная схема предлагаемого устройства.
В соответствии со схемой аккумуляторная батарея 1 соединена с первым входом буферного блока 2 питания, первый выход которого подключен к первому входу входного блока 3. Второй выход входного блока 3 питания подключен ко второму входу управляющего микрокомпьютера 4, первый вход и первый выход которого соединены с третьими соответственно выходом и входом блока 2. Третий выход и четвертый вход микрокомпьютера 4 соединены соответственно с первым входом и первым выходом вспомогательного блока 5 восстановления работоспособности, четвертый выход - с вторым входом выходного блока 6. Первый вход и первый выход выходного блока 6 подключены к вторым соответственно выходу и входу блока 2 питания. Второй выход и третий вход микрокомпьютера 4 подключены к вторым соответственно входу и выходу блока 7 самодиагностики датчиков, первый вход которого соединен с первым выходом входного блока 3. Первые вход и выход блока 8 моделирования развития ситуации соединены с пятыми соответственно выходом и входом микрокомпьютера 4. Второй вход блока 8 моделирования соединен с вторым выходом вспомогательного блока 5, а третий вход и второй выход подключены соответственно к первому выходу и входу блока 9 диагностики сбоев, второй выход которого соединен с вторым входом вспомогательного блока 5. Седьмой выход микрокомпьютера 4 подключен к входу блока 10 синтеза речи, выход которого подключен к первому входу блока 11 коммутации. Второй вход блока 11 соединен с восьмым выходом микрокомпьютера 4, шестые вход и выход которого подключены к первым соответственно выходу и входу блока 12 дешифрации речевой информации.
Устройство работает следующим образом. Питание осуществляется от аккумуляторной батареи 1 АСТС с помощью буферного блока 2 питания, обеспечивающего сохранение питающих напряжений при отказе аккумуляторной батареи 1 на время, необходимое для переключения на резервный источник питания, а также отключение потребляющих цепей от батареи 1 во время стоянки АСТС с сохранением функционирования ряда аварийных ламп за счет соединения блока 2 питания и выходного блока 6. Все сигналы от датчиков поступают во входной блока 3, где они преобразуются в цифровую форму, а затем поступают в управляющий микрокомпьютер 4, который анализирует эти сигналы, а также сообщения членов экипажа и выдает задание на моделирование развития ситуации в блок 8 моделирования и в зависимости от его результатов выдает команды на исполнительные устройства и цифровую информацию в блок 10 синтеза речи для ее последующего преобразования в речевые сообщения. Вспомогательный блок 5 служит для восстановления работоспособности устройства в случае возникновения сбоев в работе программ микрокомпьютера 4 и блока 8 моделирования. Блок 7 самодиагностики датчиков выдает микрокомпьютеру 4 информацию о неисправности датчиков, получаемую от входного блока 3. Эта же информация поступает и на панель индикации АСТС. Блок диагностики 9 сбоев блока моделирования 8 анализирует правильность выполнения тестов самоконтроля блока 8 и выдает на второй вход вспомогательного блока 5 команду на перезапуск блока 8, либо команду на его отключение. Выход блока 10 синтеза речи соединен с блоком 11 коммутации, распределяющим речевую информацию по членам экипажа АСТС, а управление блоком коммутации 11 производится посредством передачи адреса абонента от микрокомпьютера 4. Цифровой сигнал на вход блока 10 синтеза речи поступает от микрокомпьютера 4 и представляет собой последовательность хранящихся в памяти микрокомпьютера 4 фонем. Выходной блок 6 согласовывает соответствующий выход микрокомпьютера 4 с входами управления исполнительных устройств АСТС, которые представляют собой набор силовых реле и полупроводниковых ключей. Блок 12 дешифрации, управляемый микрокомпьютером 4, преобразует речевые команды членов экипажа в последовательность цифровых сигналов, которая затем анализируется программно микрокомпьютером 4 путем сравнения спектра цифрового сигнала с набором эталонных спектров стандартных фонем.
После включения устройства микрокомпьютер 4 и блок 8 моделирования автоматически переходят к выполнению программ самодиагностики, а блок 7 самодиагностики анализирует работоспособность датчиков. После завершения тестов микрокомпьютер 4 в зависимости от их результатов, передаваемых с помощью вспомогательного блока 5 и блока 9 диагностики сбоев, а также в зависимости от слова состояния, выдаваемого блоком 7 самодиагностики, подстраивает конфигурацию своих программных средств. В дальнейшем этот цикл самодиагностики принудительно повторяется через определенные промежутки времени.
После выполнения первого цикла самодиагностики микрокомпьютер 4 через блок 10 синтеза речи и блок 11 коммутации производит последовательный опрос членов экипажа АСТС для самонастройки программы обработки речевой информации, получаемый от блока 12 дешифрации. Затем микрокомпьютер 4 переходит к выполнению основного программного комплекса. При этом он анализирует информацию, получаемую от датчиков и преобразованную входным блоком 3. В случае возникновения какой-либо аварийной ситуации, что отразится на показаниях соответствующих датчиков, микрокомпьютер 4 классифицирует ее и выдаст на первый вход блока 8 моделирования задание на ее моделирование. Тогда последний прерывает цикл внутренней самодиагностики и переходит к решению задачи моделирования развития ситуации. Параллельно с этим микрокомпьютер 4 выдает команды на исполнительные устройства, которые требуют безотлагательного выполнения, а командиру экипажа АСТС сообщает необходимую информацию. После выполнения задачи моделирования блок 8 выдает его результаты на пятый вход микрокомпьютера 4.
На следующем этапе микрокомпьютер 4 на основании комплексной оценки ситуации посредством блоков 10, 11 сообщает командиру экипажа АСТС оптимальный вариант проведения комплекса мер по устранению неисправностей АСТС и ожидает подтверждения на его реализацию. Речевая команда командира экипажа АСТС поступает с первого выхода блока 12 дешифрации на шестой вход микрокомпьютера 4 и, если она квалифицируется методом поиска ключевых слов, как запрет, то микрокомпьютер 4 предлагает командиру экипажа АСТС альтернативные варианты. Если речевая команда квалифицируется компьютером 4 как подтверждение предложенного варианта действий, то микрокомпьютер 4 приступает к реализации выбранного комплекса мер путем последовательной выдачи команд на соответствующие исполнительные механизмы через выходной блок 6, а также сообщений и команд тем членам экипажа, участие которых необходимо для ликвидации неиспpавностей посредством блока 10 синтеза речи и блока 11 коммутации. В случае необходимости командир экипажа АСТС может изменить или прекратить действие устройства по этому алгоритму с помощью речевых команд, поступающих в блок 12 дешифрации. Помимо этого, входной блок 3 имеет дополнительный вход для подключения аварийного клавишного пульта, обеспечивающего принудительное выключение всего устройства, либо некоторых из его блоков.
Данное устройство повышает эффективность устранения неисправностей АСТС за счет своевременного обнаружения неисправностей АСТС, а также выбора и реализации оптимального комплекса мер по их устранению. Моделирование развития ситуации и соответствующая диагностика обеспечивают не только устранение неисправностей, но и своевременное устранение причин, их вызывающих, и возможных последствий. Кроме того, повышение эффективности достигается совместными действиями экипажа АСТС и его автоматических систем благодаря наличию гибкой обратной связи между экипажем и предлагаемым устройством, обеспечивающим использование речевого канала обмена информацией, как наиболее эффективного в экстремальных ситуациях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| БОРТОВОЕ УСТРОЙСТВО РЕЧЕВОГО ОПОВЕЩЕНИЯ И КОММУТАЦИИ | 2008 |
|
RU2432622C2 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| Устройство для восстановления работы процессора | 1987 |
|
SU1476467A2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| ПАССАЖИРСКИЙ САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ И САМОЛЕТНЫМИ СИСТЕМАМИ | 2013 |
|
RU2529248C1 |
| УСТРОЙСТВО ДЛЯ СБОРА, РЕГИСТРАЦИИ И СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2115163C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| Система для синтеза тестовых сигналов | 1975 |
|
SU524181A1 |
Использование: системы автоматизированного управления средствами многоцелевого назначения, например машины для ликвидации аварий на атомных реакторах. Сущность изобретения: устройство позволяет выбрать и реализовать оптимальный комплекс мер по устранению неисправностей аварийно-спасательного транспортного средства (АСТС). Управляющий микрокомпьютер 4 анализирует сигналы от датчиков, обнаруживает неисправности в узлах АСТС и выдает команды на исполнительные механизмы для устранения этих неисправностей. Принятие оптимального в данной ситуации решения производится с помощью блока 8 моделирования развития ситуации. Для эффективного устранения неисправностей АСТС и обеспечения взаимодействия экипажа АСТС и его автоматических систем устройство оснащено блоком 10 синтеза речи, формирующим речевые сообщения и команды, поступающие через блок 11 коммутации к отдельным членам экипажа, и блоком 12 дешифрации, принимающим речевую информацию от членов экипажа. Для диагностики, перезапуска и аварийного отключения блока 8 моделирования введен блок 9 диагностики сбоев, контролирующий правильность его работы. 1 ил.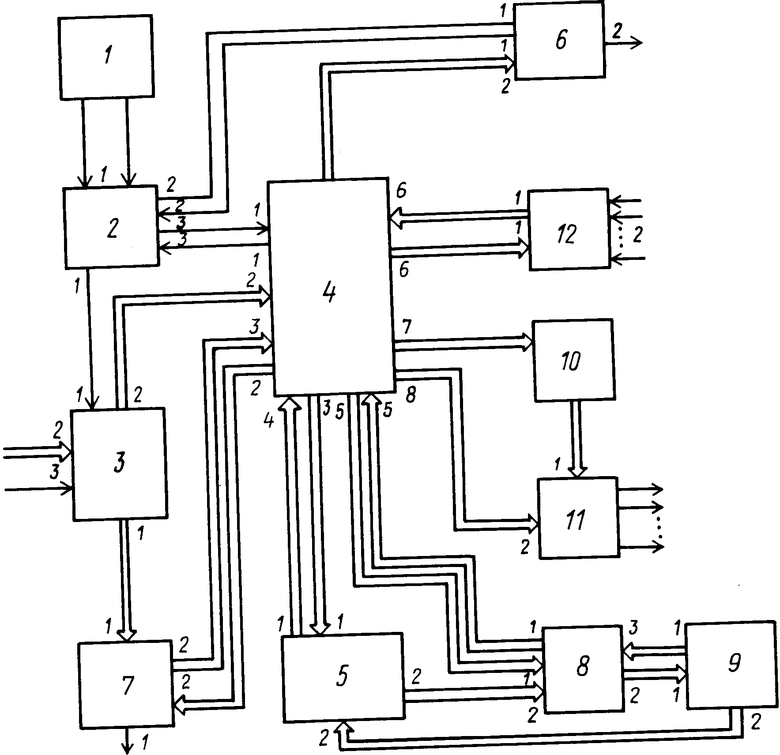
УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ НЕИСПРАВНОСТЕЙ АВАРИЙНО-СПАСАТЕЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА, содержащее аккумуляторную батарею, соединенную с первым входом буферного блока питания, входной блок, первый вход которого подключен к первому выходу буферного блока питания, а второй вход - к выходу блока датчиков состояния функциональных узлов, блок самодиагностики датчиков, первый вход которого соединен с первым выходом входного блока, а первый выход - с панелью индикации, выходной блок, первый вход которого подключен к второму выходу буферного блока питания, первый выход - к второму входу последнего, а второй выход - к входу блока исполнительных механизмов, управляющий микрокомпьютер, первый вход которого соединен с третьим выходом буферного блока питания, второй вход - с вторым выходом входного блока, третий вход - с вторым выходом блока самодиагностики, четвертый вход - с первым выходом вспомогательного блока восстановления работоспособности, первый выход - с третьим входом буферного блока питания, второй выход - с вторым входом блока самодиагностики, третий выход - с первым входом вспомогательного блока восстановления работоспособности, а четвертый выход - с вторым входом выходного блока, отличающееся тем, что в него введены блок моделирования развития ситуации, блок диагностики сбоев, блок дешифрации речевой информации, блок синтеза речи и блок коммутации, при этом первый вход блока моделирования развития ситуации соединен с пятым выходом микрокомпьютера, второй вход - с вторым выходом вспомогательного блока восстановления работоспособности, третий вход - с первым выходом блока диагностики сбоев, первый выход - с пятым входом микрокомпьютера, а второй выход - с входом блока диагностики сбоев, второй выход которого подключен к второму входу вспомогательного блока восстановления работоспособности, управляющий вход и выход блока дешифрации речевой информации соединены с шестыми соответственно выходом и входом микрокомпьютера, вход блока синтеза речи подключен к седьмому выходу микрокомпьютера, а выход - к первому входу блока коммутации, соединенного вторым входом с восьмым выходом микрокомпьютера.
| СПОСОБ РЕГЕНЕРАЦИИ ОТРАБОТАННОЙ ВОДОЭМУЛЬСИОННОЙ СМАЗОЧНО-ОХЛАЖДАЮЩЕЙ ЖИДКОСТИ | 2000 |
|
RU2177984C1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
