Изобретение относится к грузоподъемной и транспортной технике и может быть использовано в различных отраслях промышленности для внутрицеховых и межцеховых перевозок грузов.
Известен подвесной манипулятор, содержащий ходовую тележку с установленным на ней механизмом подъема, включающий подвеску, несущую траверсу, грузозахватный орган и привод, выходной вал которого посредством зубчатой передачи соединен с подвеской [1].
Однако известное устройство не обеспечивает необходимой точности выхода грузозахватного органа на заданную высоту.
Целью изобретения является улучшение эксплуатационных характеристик за счет обеспечения высокой точности вывода грузозахвата на заданную высоту.
Цель достигается тем, что транспортный робот подвесной монорельсовой дороги, содержащий ходовую тележку с рамой, на которой расположено грузоподъемное устройство с управляемым электрическим приводом, выходной вал которого связан гибким тяговым элементом с грузозахватом, снабжен расположенным на раме бесконтактным датчиком положения грузозахвата, управляющий элемент которого закреплен на выходном валу привода, а управляемый элемент датчика включен в электрическую цепь управления приводом грузоподъемного устройства.
При этом бесконтактный датчик содержит источник светового потока, управляемый элемент выполнен в виде светоприемника, а управляющий элемент выполнен в виде диска с размещенными по периметру радиальными пазами.
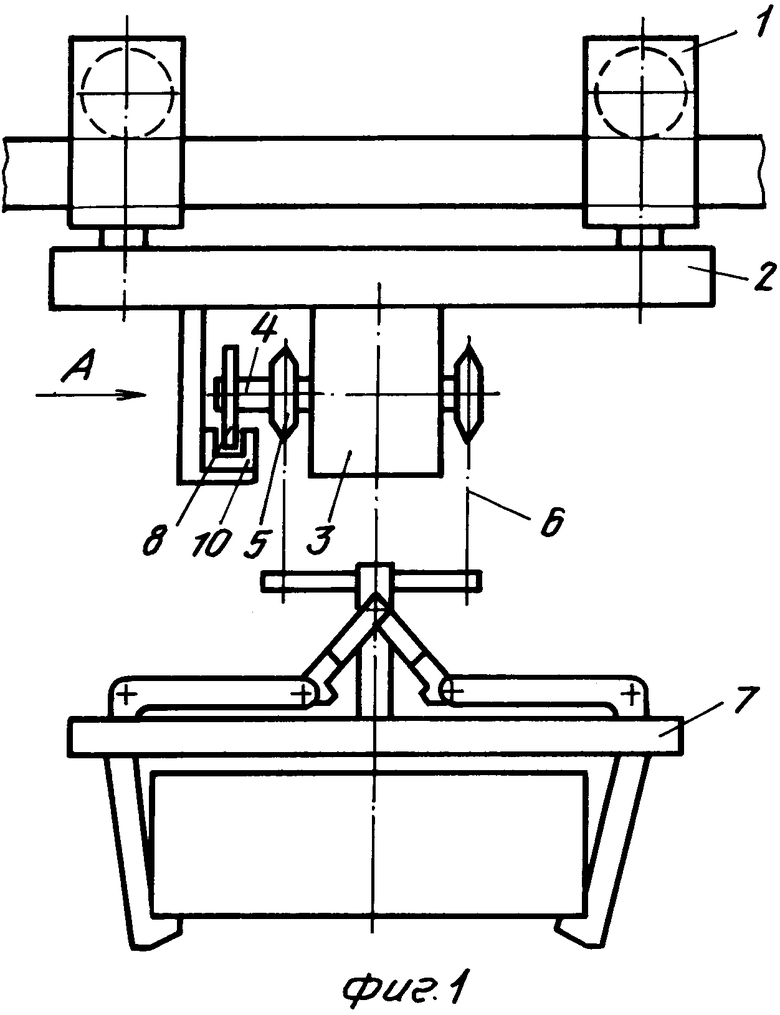
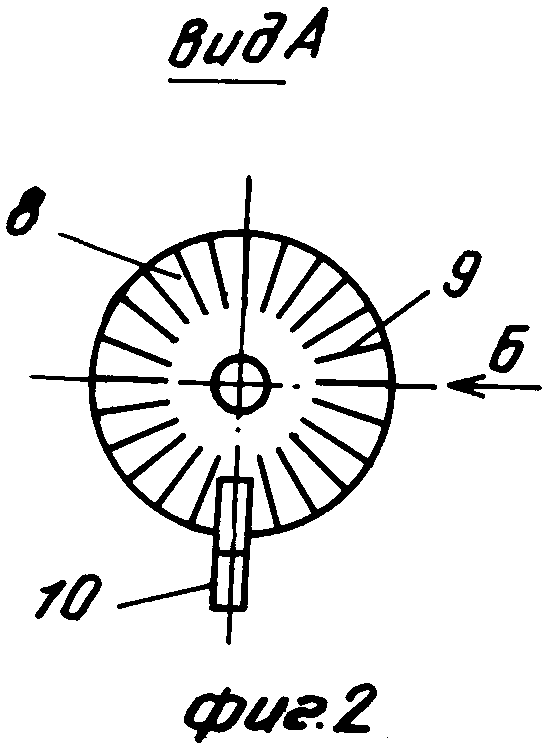
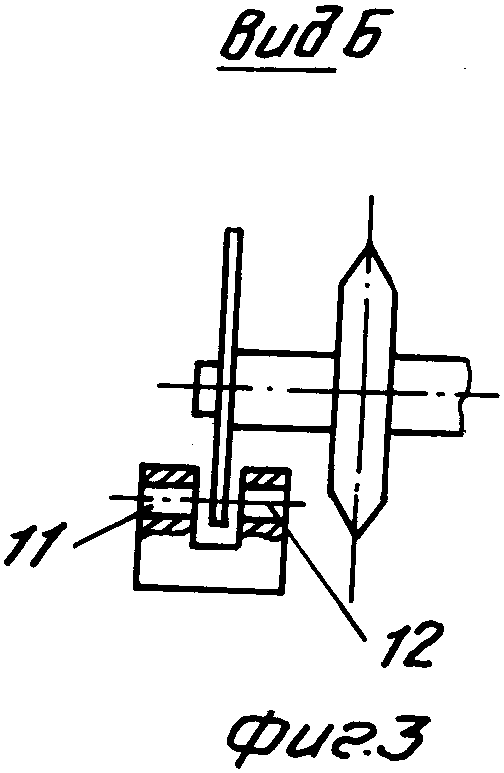
На фиг. 1 изображен транспортный робот подвесной монорельсовой дороги; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2.
Транспортный робот подвесной монорельсовой дороги содержит ходовую тележку 1, связанную с ней раму 2, на которой размещен привод 3 подъема груза. На выходном валу 4 привода 3 установлена ведущая звездочка 5 с гибким тяговым органом, например пластинчатой цепью 6, который связан с грузозахватом 7. На выходном валу 4 установлен также управляющий элемент, выполненный в виде диска 8 с размещенными по периметру радиальными пазами 9, который имеет возможность взаимодействия с установленным на раме 2 бесконтактным датчиком 10, включающим источник 11 светового потока и светоприемник 12, подключенный в электрическую цепь управления приводом 3 подъема.
Транспортный робот работает следующим образом.
После остановки транспортного робота и размещения его над заданным рабочим местом включается на опускание грузозахвата 7 привод 3 подъема на определенную высоту, заданную программой управления роботом. При этом установленная на выходном валу 4 ведущая звездочка 5 осуществляет подачу цепи 6, а управляющий элемент в виде диска 8 осуществляет периодическое перекрывание светового потока источника 11, в результате чего светоприемник 1 подает в электрическую цепь управления соответствующие сигналы, которые автоматически подсчитываются. После того, как количество сигналов достигнет количества, заданного программой управления роботом и соответствующего заданной высоте размещения грузозахвата 7, электродвигатель привода 3 отключается. Аналогичным образом происходит отключение двигателя при подъеме грузозахвата 7 с грузом.
Предлагаемое изобретение позволяет с высокой точностью осуществлять размещение грузозахватного органа (с грузом или без груза) на любой заданной высоте. При этом исключается любая возможность возникновения аварийной ситуации, что способствует значительному улучшению эксплуатационных характеристик робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ ТРАНСПОРТНОГО РОБОТА ПОДВЕСНОЙ МОНОРЕЛЬСОВОЙ ДОРОГИ | 1992 |
|
RU2032607C1 |
| Грузозахватное устройство | 1990 |
|
SU1785989A1 |
| БЛОКИРОВОЧНОЕ УСТРОЙСТВО СТРЕЛОЧНОГО ПЕРЕВОДА ПОДВЕСНОЙ МОНОРЕЛЬСОВОЙ ДОРОГИ | 1992 |
|
RU2032565C1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ РАСПАШНЫХ ВОРОТ | 1992 |
|
RU2037621C1 |
| Монорельсовая транспортная система | 1990 |
|
SU1729861A1 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| Тягово-сцепное устройство | 1990 |
|
SU1717412A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И РАЗГРУЗКИ-ЗАГРУЗКИ ШТУЧНЫХ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ТЮКОВ С ВОЛОКНИСТЫМИ МАТЕРИАЛАМИ | 1992 |
|
RU2042592C1 |
| Привод монорельсового транспортного средства | 1989 |
|
SU1745585A1 |
| Тягово-сцепное устройство смежных транспортных средств | 1989 |
|
SU1654025A1 |
Изобретение относится к грузоподъемной и транспортной технике и может быть использовано для межцеховой и внутрицеховой транспортировки грузов в различных отраслях промышленности. Транспортный робот подвесной монорельсовой дороги содержит грузоподъемное устройство, включающее привод, выходной вал которого связан гибкой тяговым элементом с грузозахватом. Робот снабжен бесконтактным датчиком высоты подъема и опускания грузозахвата. Управляющий элемент датчика установлен на выходном валу привода и выполнен в виде диска с радиальными пазами. 1 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство промышленных роботов, Л., 1980, 118-125, 152. | |||
