Изобретение относится к подъемно- транспортному машиностроению, в частно сти к грузозахватным устройствам, и может быть использовано в подвесных монорельсовых транспортных системах в различных отраслях народного хозяйства.
Известно грузоподъемное, устройство, содержащее ходовую тележку, снабженную приводом подъема груза и шарнирно-ры- чажным механизмом, верхний конец которого закреплен на раме тележки, и траверсу, связанную с приводом подъема груза посредством гибкой тяги, установленный на нижнем конце шарнирно-рычажного механизма фиксатор положения траверсы, выполненной по крайней мере из двух втулок с глухими отверстиями, связанных между собой поперечной балки с отверстиями для прохождения гибкой тяги. При этом на траверсе выполнены ступенчатые отверстия с возможностью их центрирования с глухими отверстиями втулок фиксатора и стационарными ловителями для траверсы и фиксатора, которыми снабжено грузоподъемное устройство и которые расположены под ним на рабочих местах.
Однако эксплуатация известного устройства затруднена, поскольку При смещении центра тяжести траверсы с грузом возможно нарушение центровки отверстий втулок и ловителей.
Известно грузозахватное устройство, содержащее приводную раму, шарнирно закрепленные на ней двуплечие рычаги, траверсу, связанную с подъемным механизмом, шарнирные тяги, одни концы которых закреплены на одних плечах дву- плечих рычагов, а другие - на траверсе, и механизм фиксации положения двуплечих рычагов, включающий закрепленный на траверсе ползун и закрепленную на раме вертикальную направляющую для него.
Недостатком известного грузозахватного устройства является возможность снижения точности захвата груза и позиционирования его на рабочем месте.
fe
VI 00
ел
Ю 00
чэ
Целью изобретения является улучшеие эксплуатационных характеристик.
Поставленная цель достигается тем, что рузозахватное устройство, содержащее риводную раму, шарнирно закрепленные 5 а ней двуплечие рычаги, траверсу, связаную с подъемным механизмом, шарнирные яги, одни концы которых закреплены на дних плечах двуплечих рычагов, а другие - а траверсе, и механизм фиксации положе- 10 ия двуплечих рычагов, включающий зарепленный на траверсе ползун, и акрепленную на раме вертикальную направляющую для него, согласно изобретению, оно снабжено закрепленным на раме 15 бесконтактным датчиком нижнего положения траверсы относительно нее, управляющий элемент которого связан с одной из шарнирных тяг, а выход включен в электрическую цепь управления приводом переме- 20 щения рамы с возможностью подъема последней при раскрытых двуплечих рычагах.
При этом бесконтактный датчик содержит источник светового потока, светопри- 25 емник, а его управляющий элемент представляет собой флажок, закрепленный на первом конце одной из шарнирных тяг с возможностью перекрытия светового потока источника.30
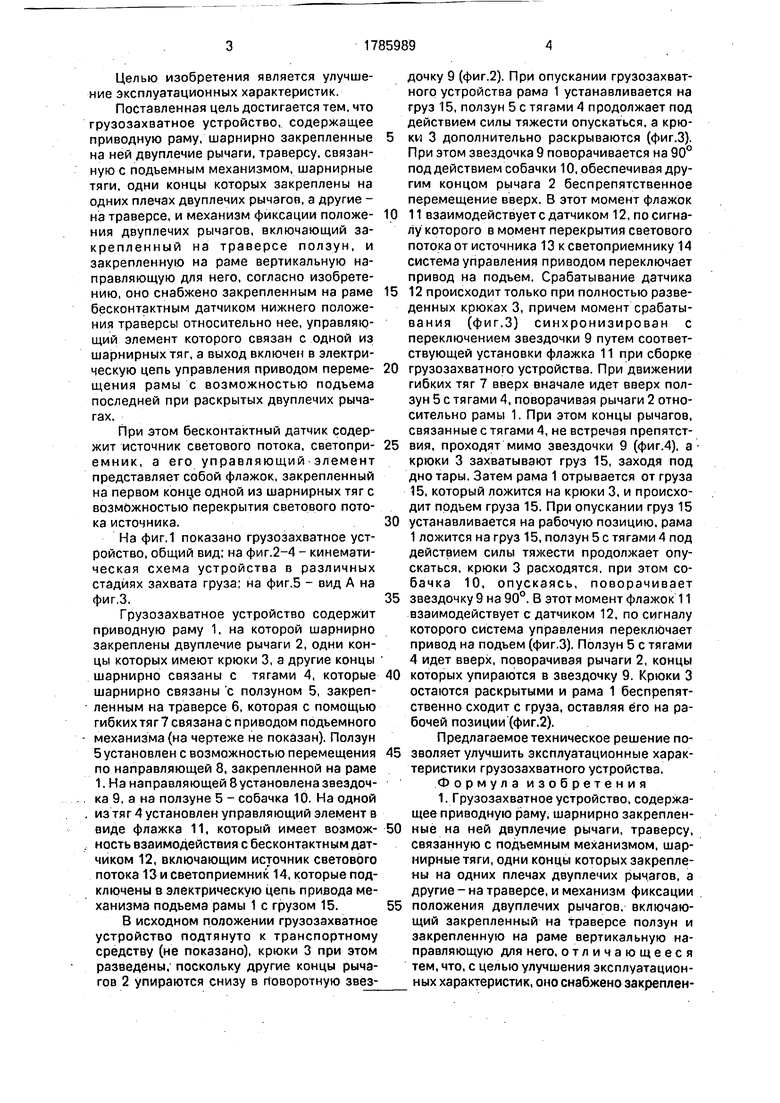
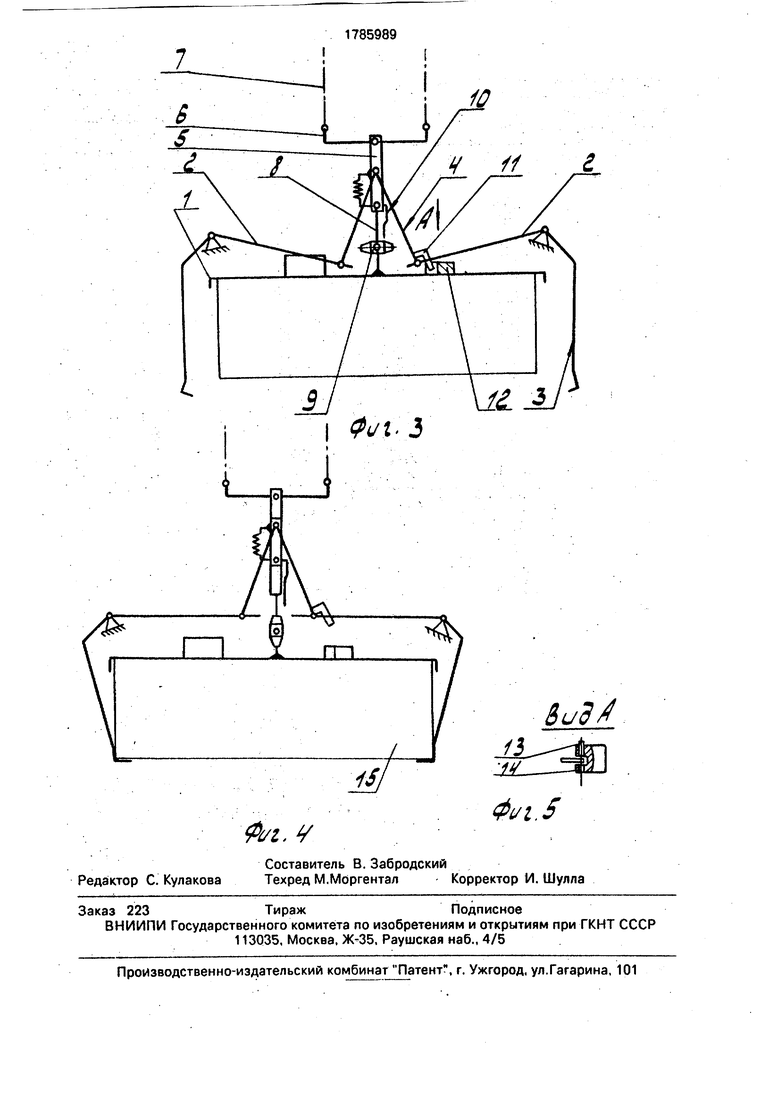
На фиг.1 показано грузозахватное устройство, общий вид; на фиг.2-4 - кинематическая схема устройства в различных стадиях захвата груза; на фиг.5 - вид А на фиг.З.35
Грузозахватное устройство содержит приводную раму 1, на которой шарнирно закреплены двуплечие рычаги 2, одни концы которых имеют крюки 3, а другие концы шарнирно связаны с тягами 4, которые 40 шарнирно связаны с ползуном 5, закрепленным на траверсе 6, которая с помощью гибких тяг 7 связана с приводом подъемного механизма (на чертеже не показан). Ползун 5 установлен с возможностью перемещения 45 по направляющей 8, закрепленной на раме 1. На направляющей 8 установлена звездочка 9, а на ползуне 5 - собачка 10. На одной из тяг 4 установлен управляющий элемент в виде флажка 11, который имеет возмож- 50 ность взаимодействия с бесконтактным датчиком 12, включающим источник светового потока 13 и светоприемник 14, которые подключены в электрическую цепь привода механизма подъема рамы 1 с грузом 15.55
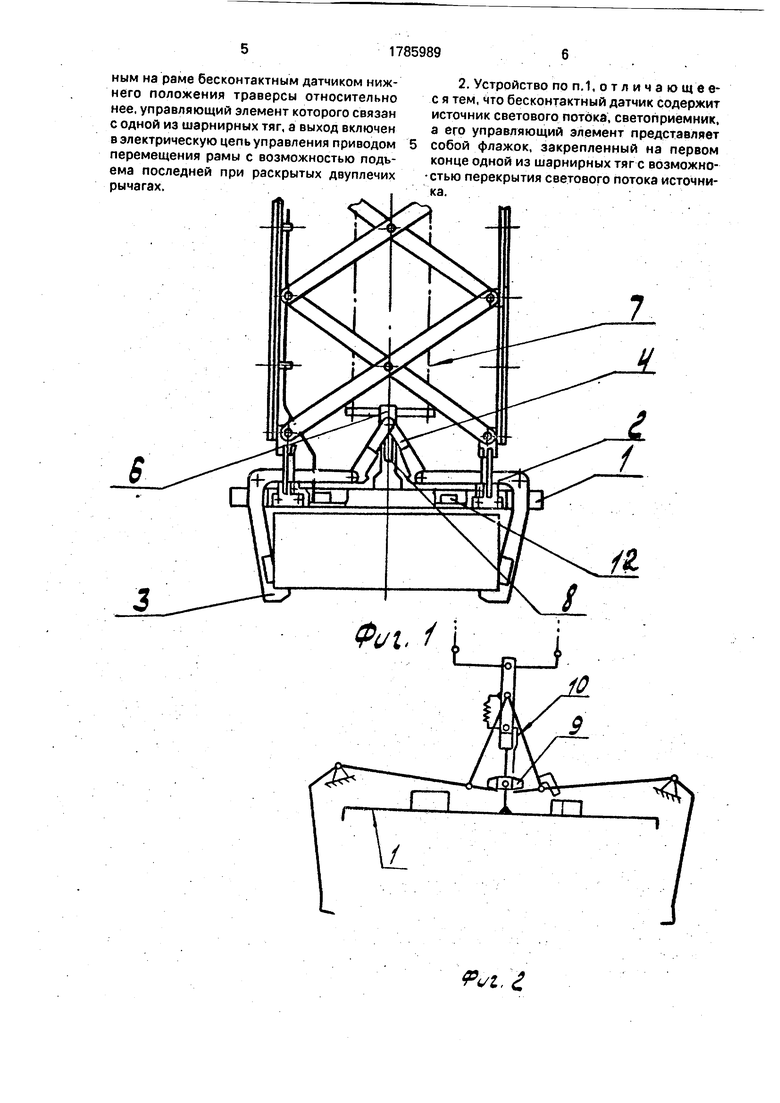
В исходном положении грузозахватное устройство подтянуто к транспортному средству (не показано), крюки 3 при этом разведены, поскольку другие концы рычагов 2 упираются снизу в поворотную звездочку 9 (фиг.2). При опускании грузозахватного устройства рама 1 устанавливается на груз 15, ползун 5 с тягами 4 продолжает под действием силы тяжести опускаться, а крюки 3 дополнительно раскрываются (фиг.З). При этом звездочка 9 поворачивается на 90° под действием собачки 10, обеспечивая другим концом рычага 2 беспрепятственное перемещение вверх. В этот момент флажок
11 взаимодействуете датчиком 12, по сигналу которого в момент перекрытия светового потока от источника 13 к светоприемнику 14 система управления приводом переключает привод на подъем. Срабатывание датчика
12 происходит только при полностью разведенных крюках 3, причем момент срабатывания (фиг.З) синхронизирован с переключением звездочки 9 путем соответствующей установки флажка 11 при сборке грузозахватного устройства. При движении гибких тяг 7 вверх вначале идет вверх ползун 5 с тягами 4, поворачивая рычаги 2 относительно рамы 1. При этом концы рычагов, связанные с тягами 4, не встречая препятствия, проходят мимо звездочки 9 (фиг.4). а крюки 3 захватывают груз 15, заходя под дно тары. Затем рама 1 отрывается от груза 15, который ложится на крюки 3, и происходит подъем груза 15. При опускании груз 15 устанавливается на рабочую позицию, рама 1 ложится на груз 15, ползун 5 с тягами 4 под действием силы тяжести продолжает опускаться, крюки 3 расходятся, при этом собачка 10, опускаясь, поворачивает звездочку 9 на 90°. В этот момент флажок 11 взаимодействует с датчиком 12, по сигналу которого система управления переключает привод на подъем (фиг.З). Ползун 5 с тягами 4 идет вверх, поворачивая рычаги 2, концы которых упираются в звездочку 9. Крюки 3 остаются раскрытыми и рама 1 беспрепятственно сходит с груза, оставляя его на рабочей позиции (фиг.2).
Предлагаемое техническое решение позволяет улучшить эксплуатационные характеристики грузозахватного устройства. Формула изобретения 1. Грузозахватное устройство, содержащее приводную раму, шарнирно закрепленные на ней двуплечие рычаги, траверсу, связанную с подъемным механизмом, шарнирные тяги, одни концы которых закреплены на одних плечах двуплечих рычагов, а другие - на траверсе, и механизм фиксации положения двуплечих рычагов, включающий закрепленный на траверсе ползун и закрепленную на раме вертикальную направляющую для него, отличающееся тем, что, с целью улучшения эксплуатационных характеристик, оно снабжено закрепленным на раме бесконтактным датчиком нижнего положения траверсы относительно нее, управляющий элемент которого связан с одной из шарнирных тяг, а выход включен в электрическую цепь управления приводом перемещения рамы с возможностью подъема последней при раскрытых двуплечих рычагах.
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что бесконтактный датчик содержит источник светового потбка, светоприемник, а его управляющий элемент представляет собой флажок, закрепленный на первом конце одной из шарнирных тяг с возможностью перекрытия светового потока источника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ ТРАНСПОРТНОГО РОБОТА ПОДВЕСНОЙ МОНОРЕЛЬСОВОЙ ДОРОГИ | 1992 |
|
RU2032607C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Грузозахватное устройство | 1989 |
|
SU1687554A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1989 |
|
SU1776623A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство | 1986 |
|
SU1402537A1 |
| Грузозахватное устройство | 1987 |
|
SU1507713A1 |
Использование: устройство предназначено для подъема штучных грузов. Сущность изобретения: грузозахватное устройство содержит приводную раму, шарнирно закрепленные на ней двуплечие рычаги, траверсу, связанную с подъемным механизмом, шарнирные тяги, связанные с двуплечими рычагами и траверсой, бесконтактный датчик нижнего положения траверсы относительно рамы, управляющий элемент которого связан с одной из шарнирных тяг, а выход включен в электрическую цепь управления приводом перемещения рамы. 1 з.п. ф-лы,, 5 ил.
/:/
Редактор С. Кулакова
&г. У
Составитель В. Забродский Техред М.Моргентал
Корректор И. Шулла
| Меламед С.М | |||
| Автоматические захваты для штучных грузов, М.: Машиностроение, 1965, с | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
