Предметом настоящего изобретения является захват автоматического захватывания предмета.
Известен автоматический захват для автоматического захватывaния предмета, который позволяет сохранить по крайней мере один геометрический реперный элемент, связанный с этим предметом, имеет в корпусе по крайней мере два узла захватывающих рычагов, каждый из которых имеет по крайней мере один подвижный рычаг захватывания, орган передачи движущей силы, соединенный с этими узлами рычагов, и по крайней мере одну пружину, расположенную между фиксированной точкой корпуса и подвижной точкой зажима, которая расположена на одном из узлов рычагов или на органе передачи движущей силы. Этот орган трансмиссии имеет по крайней мере одну степень свободы по отношению к корпусу.
Предлагаемый захват имеет два узла с двумя прямыми рычагами в каждом, которые подвижны в продольном направлении, два плеча каждого из этих двух узлов соединены при помощи тяг, шарнирно присоединенных к гайке, две гайки приводятся в трансмиссионное трансляционное перемещение при помощи стержня с резьбой. Предпочтительно стержень с резьбой состоит из двух частей: одна - с левой резьбой, другая - с правой резьбой, каждая из этих двух частей взаимодействует с одной из гаек, а пружина упирается в шайбу, закрепленную на стержне с резьбой.
Изобретение может быть использовано также для захватывания деталей какой-либо фиксированной формы или располагаемой в каком-либо опорном положении, или по крайней мере в таком положении, для которого можно определить по крайней мере один геометрический реперный элемент, связанный с этой деталью, и для того, чтобы перемещать эту деталь (путем трансляционного перемещения, вращения или сложного движения) во второе положение, для которого можно определить этот реперный элемент. Реперным элементом может быть ось или плоскость симметрии, ось вращения, сторона этой детали и т.д.
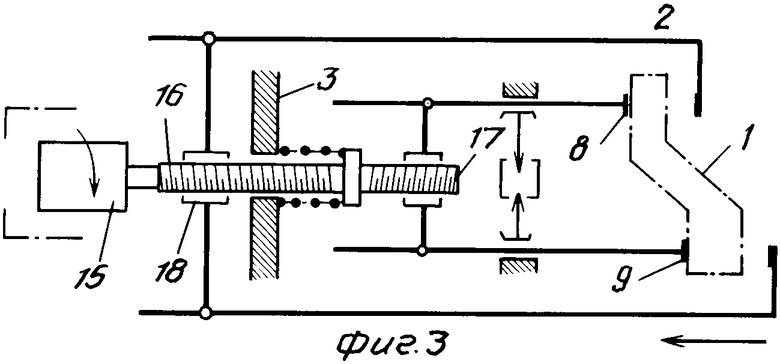
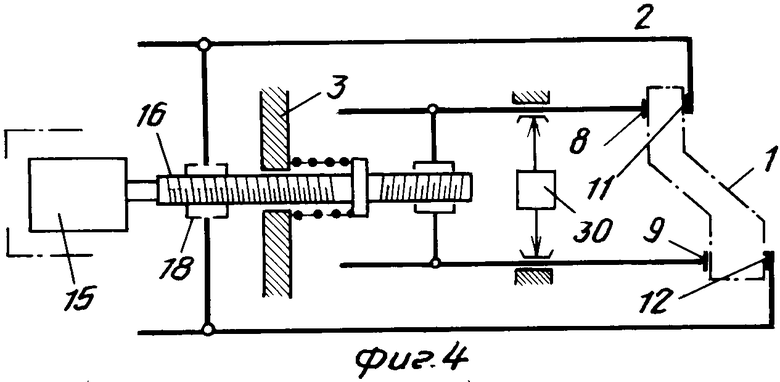
На фиг. 1 показан предлагаемый захват в открытом положении; на фиг. 2 и 3 - схемы подведения рычагов, расположенных по одну сторону от детали, к детали; на фиг. 4 - схема захвата с удерживаемой им деталью.
Деталь-феррит 1 удерживается на базовом основании в центрированном положении. Захват, находящийся в корпусе 2 (от него показана только часть перегородки 3), состоит из первого узла двух рычагов 4, 5 и второго узла двух рычагов 6, 7. Эти четыре рычага расположены параллельно друг другу и направлены так, чтобы они могли перемещаться только в продольном направлении.
На свободных концах рычагов 4, 5 имеются поверхности 8, 9 захвата, которые прижимаются к краям наружной поверхности 10 полуферрита 1, а рычаги 6, 7 имеют поверхности захвата 11, 12, предназначенные для прижимания к краям внутренней поверхности 13 феррита.
Стержень 14 с резьбой свободно перемещается в отверстии стенки 3 и приводится во вращение двигателем 15, который является плавающим по отношению к опоре зажима и предпочтительно может быть отсоединяемым от стержня 14. Первая половина 16 стержня с резьбой имеет левый шаг, другая половина 17 - правый шаг.
На первой половине стержня расположена гайка 18, на которой шарнирно закрепляются две тяги 19, 20, которые соответственно через шарнирные соединения 21, 22 присоединяются к рычагам 6, 7. На второй половине 17 стержня располагается гайка 23, к которой шарнирно подсоединены две тяги 24, 25, которые соответственно подсоединяются через шарнирные соединения 26, 27 к рычагам 4, 5.
В середине стержня 14 закреплена шайба 28, часть 16 стержня проходит через перегородку 3. Вокруг стержня, между стенкой и шайбой 28, установлена пружина 29. На опоре захвата закрепляют устройство 30 блокирования рычагов зажима, например для рычагов 4, 5. Это устройство не должно оказывать значительных усилий на рычаги, поскольку сжимание феррита обеспечивает стержень с резьбой, следовательно, устройство 30 служит только для удержания положения репера, когда зажим сжимается на детали. Устройство 30 может работать от любого подходящего движительного устройства, например от электромагнита или от стержня с резьбой, приводимого во вращение при помощи двигателя.
На фиг. 1 захват открыт. Пружина 29 сжимается между перегородкой 3 и шайбой 28 за счет того, что гайки 18 и 23 находятся в ближнем положении по отношению к середине стерня с резьбой 14, т.е. в самом близком друг от друга положении.
На фиг. 2 двигатель 15 начинает вращать стержень с резьбой 14 так, что гайки 18 и 23 расходятся друг от друга. Пружина 29 начинает разжиматься и толкает рычаги 4, 5 к детали 1.
На фиг. 3 - двигатель 15 продолжает вращаться в том же направлении, и за счет этого поверхности 8 и 9 рычагов 4 и 5 прижимаются к поверхности 10 детали 1.
За счет шарнирного соединения между тягами 24 и 25 и гайкой 23, с одной стороны, и рычагами 4 и 5, с другой стороны, перемещения рычагов 4 и 5 являются независимыми друг от друга. Отсюда следует, что, если один из этих рычагов прижимается к детали 1 раньше другого рычага, то нет никакого риска повредить или разрушить эту деталь при продолжении перемещения вперед гайки 23 до прижимания обоих рычагов к детали 1. Как только оба рычага 4, 5 прижмутся своими поверхностями 8, 9 к детали 1, стержень 14 начинает удаляться от детали 1, поскольку гайка 23 не может больше перемещаться вперед, а двигатель 15 продолжает вращаться.
Такое возвратное перемещение стержня 14 в комбинации с возвратным движением гайки 18 приближает к детали 1 поверхности 11, 12 рычагов 6, 7. Как и в случае рычагов 4, 5 рычаги 6, 7 могут также не одновременно прижиматься к детали 1 за счет шарнирных соединений между тягами 19, 20, гайкой 18 и рычагами 6, 7. Как только поверхности 11, 12 будут в контакте с поверхностью 13 детали 1, двигатель 15 останавливается. Остановка двигателя может производиться, например, датчиками давления, которые располагаются на поверхностях 11, 12, или ограничителями крутящего момента, которые располагаются между двигателем 15 и стержнем 14. Когда захват будет в положении, показанном на фиг.4, устройство 30 блокирует рычаги 4, 5.
Затем можно разжать устройство закрепления детали на центрирующем приспособлении и переместить захват, сжимающий деталь, при этом геометрическим репером зажима будет его опора (перегородкой 3), положение которой по отношению к центрирующему устройству, на котором закреплена деталь 1, может быть определено очень точно. Когда перемещают захват, сжатый на детали, эта деталь не может перемещаться по отношению к опоре зажима, так как устройство 30 блокирует рычаги 4 и 5 по отношению к опоре зажима, а стержень с резьбой 14 препятствует разжиманию рычагов 6, 7 по отношению к рычагам 4, 5.
Усилие, оказываемое рычагами 4, 5 на сторону 10 детали 1, точно уравновешено усилием, воздействующим на сторону 13 детали, поскольку рычаги являются плавающими по отношению к опоре (неподвижной) зажима, перед блокированием при помощи устройства 30 и эта блокировка не оказывает влияния на зажимание детали 1 рычагами зажима.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАТЯЖКИ ПЕРЕДКА БОТИНКА НА КОЛОДКУ | 1971 |
|
SU322872A1 |
| УСТРОЙСТВО ДЛЯ ФОРМООБРАЗОВАНИЯ | 1994 |
|
RU2076010C1 |
| Захватное устройство | 1988 |
|
SU1625683A1 |
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Захватное устройство | 1985 |
|
SU1274921A1 |
| Тяга торсионного стабилизатора вагона | 2020 |
|
RU2743601C1 |
| Универсальный патрон | 1990 |
|
SU1814993A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| УСТРОЙСТВО ДЛЯ ОСТЕОСИНТЕЗА ПОЗВОНОЧНИКА | 1991 |
|
RU2043081C1 |
| СТАНОК ДЛЯ ВСТАВКИ И ЗАКРЕПЛЕНИЯ ПРОБОК ВО ВТУЛКАХ КАТУШЕК | 1928 |
|
SU20801A1 |
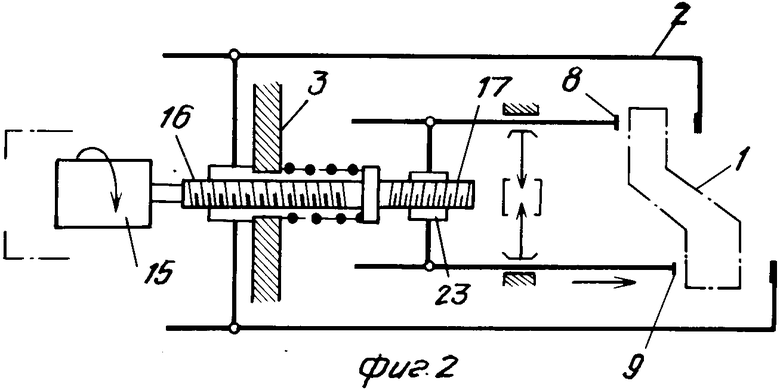
Использование: робототехника. Существо: в захвате имеется стержень 14 с резьбой, приводимый во вращение, одна часть его 16 имеет левый шаг резьбы, а другая 17 - правый шаг резьбы. Этот стержень через гайки 18, 23 и тяги 19, 20 и 24, 25 увлекает рычаги захватывания 4,5 и 6,7, которые действуют на предмет уравновешенными усилиями за счет того, что рычаги и стержень с резьбой являются плавающими по отношению к корпусу зажима, но они блокируются устройством 30, как только предмет захвачен. 1 з.п. ф-лы, 4 ил.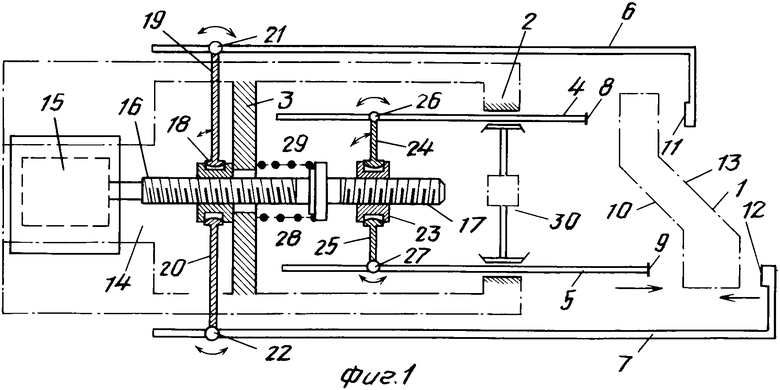
| Захват | 1976 |
|
SU592591A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
