1С
4 СО К
Изобретение относится к машиностроению, в частности к стар1костроению, и может быть использовано для подачи деталей к станкам и агрегатам.
Целью изобретения является расширение технологических возможностей захватного устройства за счет обеспечения возможнсоти захвата деталей в широком диапазоне размеров.
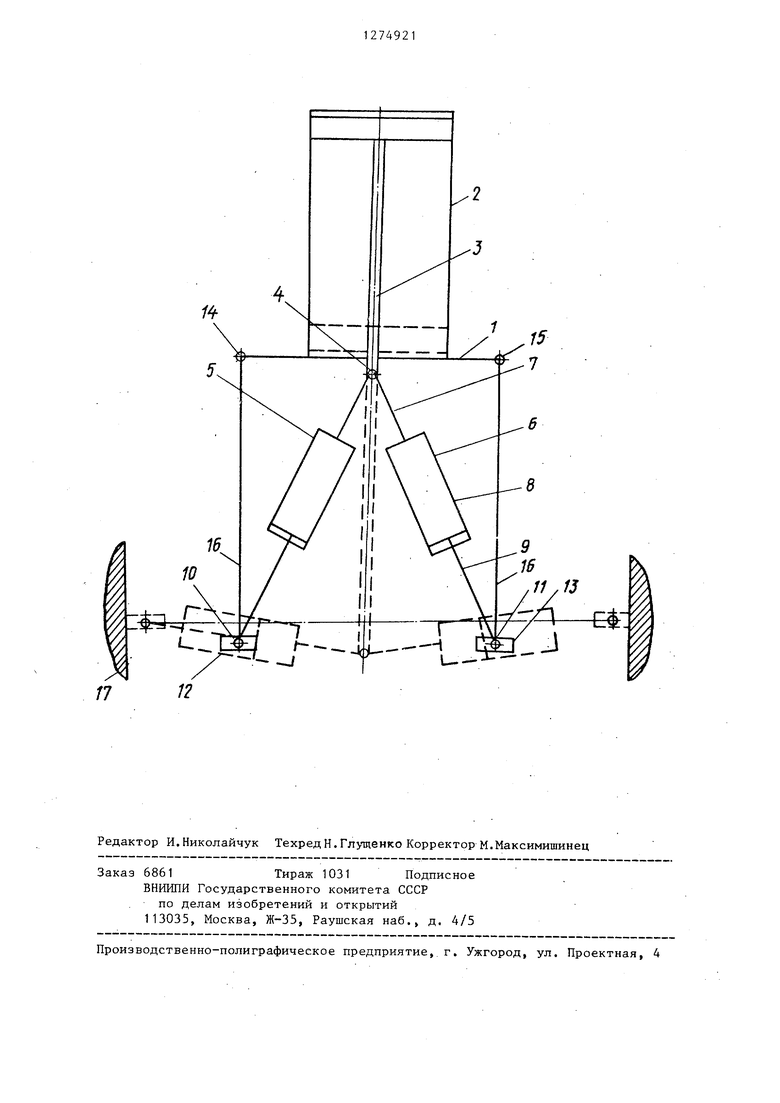
На чертеже изображено захватное устройство, продольный разрез.
Захватное устройство состоит из корпуса 1, привода в виде силового цилиндра 2, штока 3, который соединен посредством шарнира 4 с двумя телескопическими тягами 5 и 6, каждая из которых имеет первый стержень 7, пневмоцилиндр 8 со вторым стержнем штоком 9, причем штоки 9 пневмоцилиндров 8 посредством шарниров 10 и 11 связаны с зажимными губками 12 и 13, которыедополнительно шарнирами 14 и 15 связаны с корпусом 1 посредством жестких рычагов 16.
Захватное устройство работает следующим образом.
При подаче давления в силовой :.цилиндр 2 приводной шток 3 перемещается, увлекая при этом соединенные с ним посредством шарнира 4 телескопические тяги 5 и- 6, содержащие пневмоцилиндры 8 со штоками 9, в которые подано рабочее давление, рассчитанное на обеспечение необходимого усилия захвата, и в положении, когда деталь захвачена, перемещаясь, штоки 9 пневмоцилиндров 8 вызывают перемещение связанных через шарниры 10 и 11зажимных губок 12 и 13.
Зажимные губки 12 и 13 перем:ещаются по радиусу жестких рычагов 16, связанных с зажимными губками 12 и
13 посредством шарниров 10 и 11, Жесткие рычаги 16 перемещаются вокруг шарниров 14 и 15, которыми они прикрепленрл к корпусу 1 . При захватываНИИ транспортируемой детали 17. на зажимньгх губках 12 и 13 возникают усилия, которые действуют на штоки 9 пневмоцилиндров 8, вызывая их перемещение и повьш ение давления в пневмоцилиндрах 8, которое регулируется системой предохранительных клапанов, бла одаря чему оно остается постоянным, что обеспечивает передачу усилия захвата на все детали, входяш;ие в диапазой захватываемых размеров, без изменения. Перейдя-за нейтральное положение, пневмоцилиндры 8 останавливаются, так как от дополнительного перемещения они ограничены ходом
штока 3 силового цилиндра 2. В таком положении деталь 17 захвачена. При захвате детали с минимальным размером штоки 9 пневмоцилиндра 8 при переходе нейтрального положения полностыо вдвинуты, использовав свой ход. Перейдя нейтральное положение, тяги 5 и 6 увеличивают при этом свой размер, деталь в таком положении захвачена. При захвате детали с максимальным размером, когда телескопические тягн 5 и 6 перейдут нейтральное положение, штоки 9 пневмоцилиндров 8 максимально выдвинуты, деталь захвачена.
Таким образом, предложенное устройство позволяет за счет изменения хода поршня в пневмоцилиндрах увеличивать диапазон размеров захватываемой детали, а также за счет сохранения постоянного усилия на зажимных губках захватывать детали, имеющие сложную конфигурацию поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1984 |
|
SU1177153A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| Захватное устройство | 1988 |
|
SU1625683A1 |
| Захват | 1980 |
|
SU905061A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| Манипулятор | 1985 |
|
SU1315299A1 |
| Захватное устройство | 1985 |
|
SU1303404A1 |
| Захват | 1986 |
|
SU1397280A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, на котором закреплен привод, выполненный в виде силового цилиндра, и телескопические тяги, каждая из которых выполнена в виде двух соосно расположенных стержней, причем концы первых стержней тяг шарнирно соединены между собой и со штоком силового цилиндра привода, а на вторых стержнях тяг шарнирно установлены зажимные губки, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено двумя рычагами и дополнительными силовыми цилиндрами, причем рычаги шарнирно соединены с корпусом и зажимными губками, а дополнительные силовые цилиндры размещены на телескопических тягах, причем корпус каждого цилиндра жестко соедиi нен с первым стержнем телескопической тяги, а шток - с вторым. (Л
| Схват | 1984 |
|
SU1177153A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
