Изобретение относится к области дистанционного управления летательными аппаратами (ЛА) и может использоваться в системах дистанционного управления (СДУ) наземных транспортных средств.
Известны боковые рукоятки, предназначенные для СДУ [1, 2], содержащие чувствительные элементы (датчики), пружинные механизмы загрузки, таровые или универсальные шарниры. Недостатками этих устройств являются сложность и наличие большого числа пар трения в рычажных механизмах передачи перемещения от рукоятки к датчикам и механизмам загрузки, их блочное (узловое) исполнение и большие габариты, огpаниченные возможности для резервирования датчиков.
Наиболее близким по технической сущности к предлагаемому изобретению является боковая рукоятка [3], содержащая резервированные электрические датчики управляющих сигналов перемещения по двум осям управления ЛА, пружинные механизмы загрузки, рукоятки, шаровой шарнир, установленные в корпусе.
Недостатком этой рукоятки является сложность конструкции и большие габариты из-за наличия пространственных рычажно-тяговых передач к датчикам и механизмам загрузки, большего числа пар трения в местах сопряжения звеньев передач, снижающих точность и надежность устройства, специальных устройств для регулировки длины тяг, ограниченные возможности резервирования по датчикам в заданных габаритах.
Целью изобретения является упрощение конструкции, уменьшение габаритов, расширение возможностей резервирования, повышение надежности и точности.
Поставленная цель достигается тем, что в боковой рукоятке управления, содержащей резервированные электрические датчики управляющих сигналов перемещения по двум осям управления ЛА, пружинные механизмы загрузки рукоятки, шаровой шарнир, установленные в корпус, датчики и механизмы загрузки выполнены встроенными установкой статоров датчиков с обмотками в отверстия корпуса, расположенные в горизонтальной плоскости и образующие восьмилучевую звезду, а общий для всех датчиков ротор в форме усеченной полусферы закреплен на рукоятке, причем центры восьмилучевой звезды осей датчиков и полусферы ротора совпадают с центром шарнира, и установкой комплектов из пружин сжатия, опор и толкателей пружин механизмов загрузки в отверстия корпуса, расположенные в другой горизонтальной плоскости и образующие четырехлучевую звезду, причем центр четырехлучевой звезды осей отверстий располагается на вертикальной оси рукоятки при нахождении ее в нейтральном положении.
Толкатели пружин механизмов загрузки снаружи имеют опорные сферические поверхности, расположенные таким образом, что при перемещении рукоятки в направлении выбранной оси управления ЛА каждая из них взаимодействует как минимум с одной поверхностью смежных толкателей под действием своих пружин, обеспечивая взаимное блокирование трех оставшихся механизмов загрузки и нагружение рукоятки усилием одного четвертого механизма загрузки.
Нижний хвостовик рукоятки имеет четыре наружных горизонтальных паза с заплечиками, в которых уложены шарики, причем каждые два противоположных ряда шариков образуют линейные направляющие качения для перемещения рукоятки в направлении соответствующей оси управления ЛА.
В результате поиска, проведенного по доступным источникам научно-технической и патентной информации, аналогов, содержащих признаки, отличающие предлагаемое техническое решение от прототипа, не обнаружено, на основании чего можно считать, что оно соответствует критерию "существенные отличия".
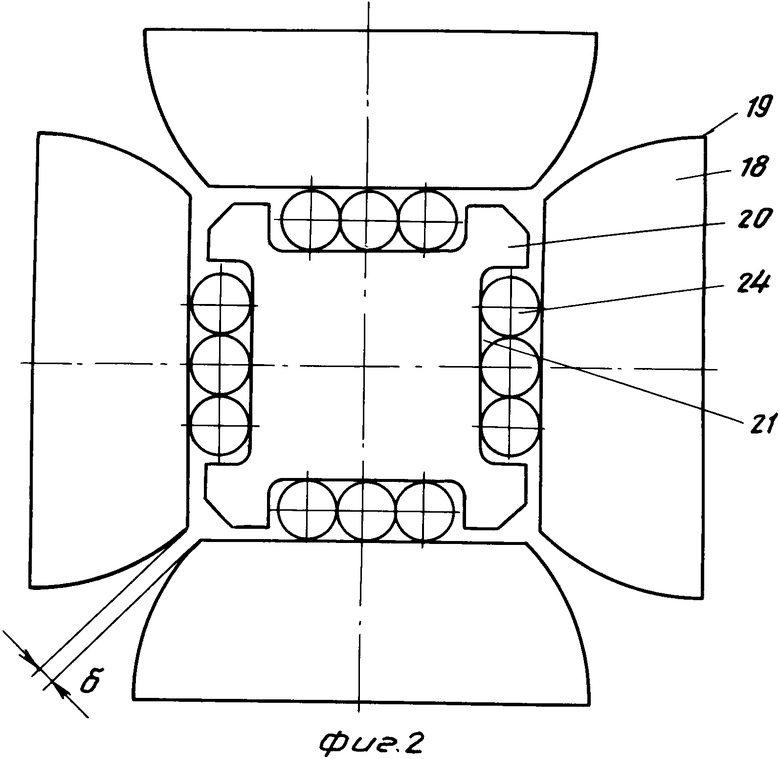
На фиг. 1 показан общий вид устройства боковой рукоятки управления; на фиг. 2 - устройство линейных направляющих качения, вид снизу, увеличено.
Устройство состоит из рукоятки 1, вал 2 которой установлен в шаровое кольцо 3 шарнира.
Наружное кольцо 4 шарнира зафиксировано в гнезде 5 жесткого корпуса 6. В горизонтальных отверстиях 7 корпуса, образующих восьмилучевую звезду с угловым шагом лучей 45о, установлены статоры 8 одинаковых вихревых электрических датчиков управляющих сигналов перемещения рукоятки по двум осям управления ЛА, например по крену и тангажу, с четырехкратным резервированием по каждой оси управления. На фиг. 1 показаны два статора из восьми. На каждом статоре навиты обмотки 9 возбуждения, питаемые напряжением высокой частоты, и сигнальная обмотка 10. Каждый статор в гнезде запирается стопорным кольцом 11, между статором и стопорным кольцом установлены нажимное плоское кольцо 12 и упругое кольцо 13. На валу 2 в зоне шарнира установлен ротор 14 в форме усеченной полусферы, изготовленный из алюминиевого сплава. Центры восьмилучевой звезды осей датчиков и полусферы ротора совпадают с центром шарового шарнира, а плоскость наибольшего диаметра ротора лежит в плоскости восьмилучевой звезды осей датчиков. В нижней части корпуса в четырех горизонтальных отверстиях, образующих четырехлучевую звезду, установлены комплекты механизмов загрузки, имитирующих пилоту аэродинамические нагрузки, возникающие на управляющих поверхностях соответствующих осей ЛА в полете. Каждый комплект содержит две пружины 15 и 16 сжатия, опоры 17 и толкатели 18, причем последние снаружи имеют пояса 19 сферической поверхности. На вал 2 рукоятки установлена втулка 20, имеющая четыре наружных горизонтальных паза 21, закрытых снизу квадратной шайбой 22 с заплечиками 23 для невыпадения шариков 24. Ротор 14, шаровое кольцо 3, втулка 20 и шайба 22 на валу 2 рукоятки стянуты самоконтрящейся гайкой 25. В каждый паз уложено по три шарика. Под действием предварительно сжатых пружин 15 и 16 каждый ряд шариков, показанных на фиг. 2, взаимодействует с торцовой поверхностью своего толкателя 18, при этом между смежными толкателями образуется гарантированный зазор δ порядка 0,1 мм. Каждая пара противоположно расположенных рядов шариков образует линейные направляющие качения.
Устройство работает следующим образом.
В вертикальном, нейтральном положениях рукоятки 1 ее нижний хвостовик фиксируется толкателями 18, при этом в сигнальных обмотках датчиков индуктируются минимальные "нулевые" сигналы. Электронной схемой, осуществляющей питание обмоток возбуждения напряжением высокой частоты и обработку выходных сигналов, формируются "нулевые" сигналы всех датчиков в заданных пределах. При отклонении рукоятки 1 в направлении выбранной оси управления ЛА пружины соответствующего механизма загрузки дополнительно сжимаются, создавая усилие противодействия, пропорциональные углу ее отклонения. Ротор 14 изменяет свое положение относительно обмоток статоров датчиков, взаимная индукция между обмотками изменяется, на выходе сигнальной обмотки появляется напряжение, преобразуемое электронной схемой и пропорциональное углу отклонения рукоятки от центрального положения. Толкатель второго механизма загрузки, расположенного противоположно нагруженному, под действием предварительно сжатых пружин 15 и 16 смещается в сторону первого механизма загрузки на величину указанного гарантированного зазора δ и после контактного взаимодействия с одним или сразу двумя смежными толкателями блокируется в этом положении.
При возвращении рукоятки в нейтральное положение первоначальная позиция толкателей восстанавливается, так как величина сил трения между сферическими поверхностями самоустанавливающихся толкателей и цилиндрическими поверхностями гнезд незначительна.
Перемещение рукоятки не в направлении оси управления ЛА или ее вращение вокруг продольной оси вызывают заметное увеличение усилия или момента сопротивления из-за необходимости осуществления пилотом пересиливания пружин двух или четырех механизмов загрузки одновременно.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОКОВАЯ РУКОЯТКА УПРАВЛЕНИЯ | 1994 |
|
RU2090448C1 |
| Двигатель с катящимся дисковым ротором | 1988 |
|
SU1561166A1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНАЯ УСТАНОВКА ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2783719C1 |
| Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа | 1989 |
|
SU1675655A1 |
| Устройство механического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора и турбины газотурбинного двигателя. Способ управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора и турбины газотурбинного двигателя | 2017 |
|
RU2702063C2 |
| Гайковерт с ударно-импульсным механизмом | 1971 |
|
SU335895A1 |
| Трехкомпонентный датчик электрического поля в проводящей среде | 1982 |
|
SU1048440A1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| Крестовый переключатель | 1981 |
|
SU983787A1 |
Изобретение относится к области авиационной техники и может быть использовано для дистанционного управления летательными аппаратами и наземными транспортными средствами. Цель изобретения - упрощение конструкции, уменьшение габаритов и расширение возможностей резервирования. Цель достигается тем, что датчики выполнены в виде статоров, установленных своими обмотками в отверстия корпуса, расположенные в горизонтальной плоскости и образующие восьмилучевую звезду. Общий для всех датчиков ротор в форме усеченной полусферы закреплен на рукоятке. Центры восьмилучевой звезды осей датчиков и полусферы ротора совпадают с центром шарнира. Механизмы загрузки выполнены в виде комплектов пружин сжатия, опор и толкателей, встроенных в отверстиях корпуса, расположенных в другой горизонтальной плоскости и образующих четырехлучевую звезду. Центр четырехлучевой звезды отверстий располагаются на вертикальной оси рукоятки в ее нейтральном положении. Толкатели выполнены со сферической наружной поверхностью. Рукоятка имеет нижний хвостовик с четырьмя наружными горизонтальными пазами с заплечиками, в которых уложены шарики. 2 з.п. ф-лы, 2 ил.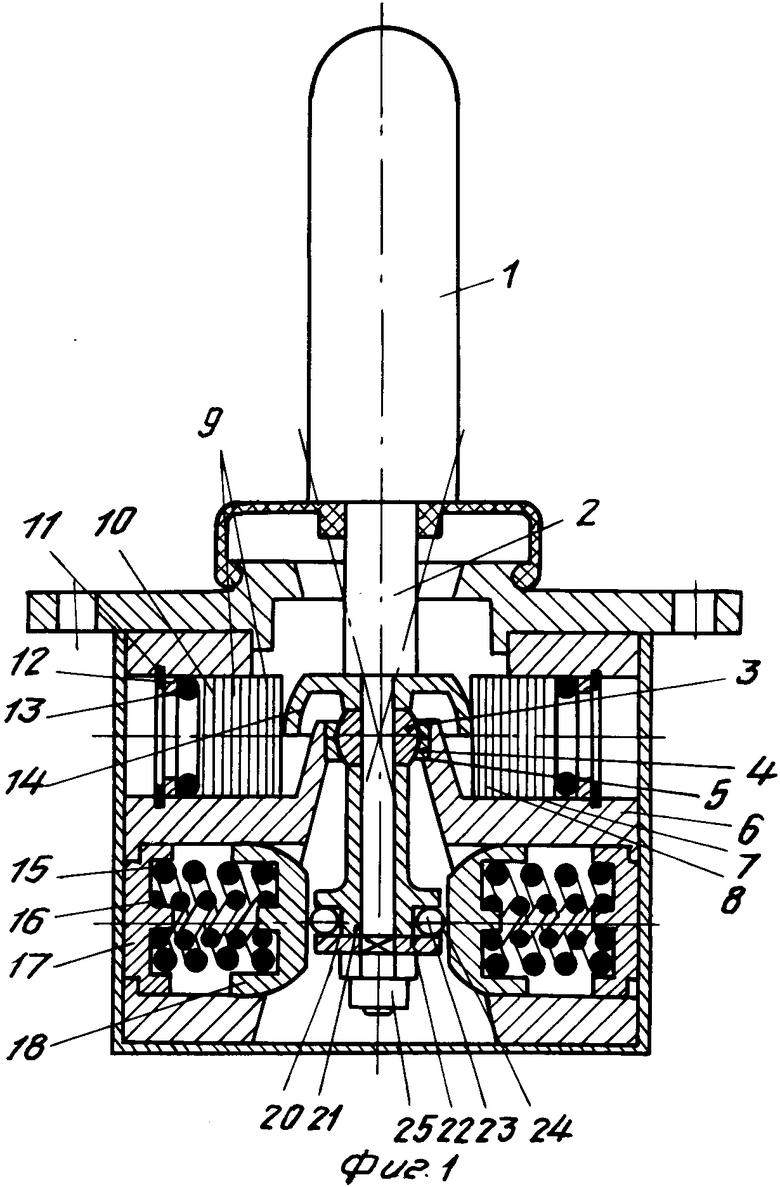
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СОДЕРЖАЩАЯ ОДНОНАПРАВЛЕННЫЕ ВОЛОКНИСТЫЕ ЛЕНТЫ ВОЛОКНИСТАЯ ЗАГОТОВКА ИЗ ПУЧКОВ АРМИРУЮЩИХ ВОЛОКОН И КОНСТРУКТИВНЫЙ ЭЛЕМЕНТ ИЗ КОМПОЗИТНОГО МАТЕРИАЛА | 2011 |
|
RU2583017C2 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
