Изобретение относится к области дистанционного управления летательными аппаратами (ЛА) и может быть использовано в системах дистанционного управления (СДУ) наземных транспортных средств.
Известны боковые рукоятки, предназначенные для СДУ, содержащие чувствительные элементы (датчики), пружинные механизмы загрузки, шаровые или универсальные шарниры [1, 2, 3]
Недостатками этих устройств являются сложность и наличие большого числа пар трения в рычажных механизмах передачи перемещения от рукоятки к датчикам и механизмам загрузки, большие габариты, а также ограниченные возможности для резервирования датчиков.
Наиболее близкой по технической сущности к заявляемой является боковая рукоятка управления, содержащая установленные в корпус четырехкратно резервированные токовихревые датчики управляющих сигналов перемещения по двум осям управления ЛА, пружинные механизмы загрузки и шарнир, через который вал рукоятки связан с корпусом. Статоры датчиков своими обмотками установлены в отверстия корпуса, расположенные в горизонтальной плоскости и образующие восьмилучевую звезду, а общий для всех датчиков ротор выполнен в виде усеченной полусферы и закреплен на валу рукоятки, причем центры восьмилучевой звезды осей статоров и полусферы ротора совпадают с центром шарнира. Механизмы загрузки выполнены в виде комплектов пружин сжатия, опор и толкателей пружин, встроенных в отверстия корпуса, расположенные в другой горизонтальной плоскости и образующие четырехлучевую звезду, центр которой располагается на вертикальной оси рукоятки в ее нейтральном положении [4]
В вертикальном, нейтральном, положении рукоятки ее нижний хвостовик фиксируется четырьмя толкателями механизма загрузки, при этом в сигнальных обмотках датчиков индицируются минимальные "нулевые" сигналы.
При отклонении рукоятки в направлении выбранной оси управления ЛА, например крена, выходные сигналы диаметрально расположенных датчиков первого и второго резервов, находящихся на выбранной оси Х управления (фиг. 1), после обработки в электронном блоке соответственно равны Umax и -Umax, а выходные сигналы датчиков третьего и четвертого резервов, находящихся на осях, расположенных под углом 45o к выбранной оси управления, соответственно равны 0,707 Umax и -0,707 Umax, при этом выходные сигналы датчиков первого и второго резервов, расположенных на оси, перпендикулярной выбранной, равны нулю.
Для получения сигналов одинаковой величины соответствующих каналов крена и тангажа в пределах допуска при любом угле отклонения рукоятки в направлении выбранной оси управления ЛА, выходные сигналы датчиков третьего резерва и датчиков четвертого резерва после обработки в электронном блоке суммируют и вычитают на операционных усилителях с коэффициентами усиления, равными К 0,707.
Однако выдержать одинаковость коэффициентов усиления операционных усилителей двух различных резервов каналов крена и тангажа с точностью до третьего знака является сложной технологической задачей, в противном же случае это создает погрешность в выходных сигналах всех четырех резервов.
Для повышения точности, обеспечения линейности и крутизны выходных сигналов, а также уменьшения габаритов устройства в предлагаемой боковой рукоятке, содержащей установленные в корпусе резервированные датчики управляющих сигналов перемещения по двум осям управления ЛА, пружинные механизмы загрузки и шарнир, через который вал рукоятки связан с корпусом, датчики управляющих сигналов выполнены в виде индукционных датчиков поступательных перемещений, установленных в корпусе в двух взаимно перпендикулярных плоскостях таким образом, что их оси параллельны оси рукоятки в нейтральном положении и расположены концентрично относительно нее, подпружиненные сердечники датчиков через одноплечие рычаги, оси которых закреплены на корпусе, связаны с общим толкателем, закрепленным на валу рукоятки, причем точки контакта сердечников датчиков и толкателя с рычагами, а также центр шарнира и оси рычагов расположены в одной горизонтальной плоскости при нейтральном положении рукоятки.
Механизмы загрузки боковой рукоятки расположены в горизонтальной плоскости выше оси вращения рукоятки, что обеспечивает увеличение хода рукоятки.
Вал рукоятки в месте контакта с толкателями механизма загрузки выполнен в виде четырехгранника, в каждую грань которого завальцованы шарики, причем противоположные ряды шариков образуют направляющие качения для перемещения рукоятки.
Для получения четырехкратного резервирования сигналов датчиков по каналам крена и тангажа первые первичные обмотки и вторые первичные обмотки первой и второй пары датчиков, смещенных в пространстве по отношению друг к другу на 90o, соединены соответственно параллельно, первые вторичные обмотки диаметрально расположенных датчиков образуют соответственно первый и второй резервы, а вторые вторичные обмотки третий и четвертый резервы каналов крена и тангажа.
Для снижения трудоемкости технологической регулировки "нулевого" сигнала и повышения ее точности датчики управляющих сигналов перемещения установлены в корпусе на резьбе.
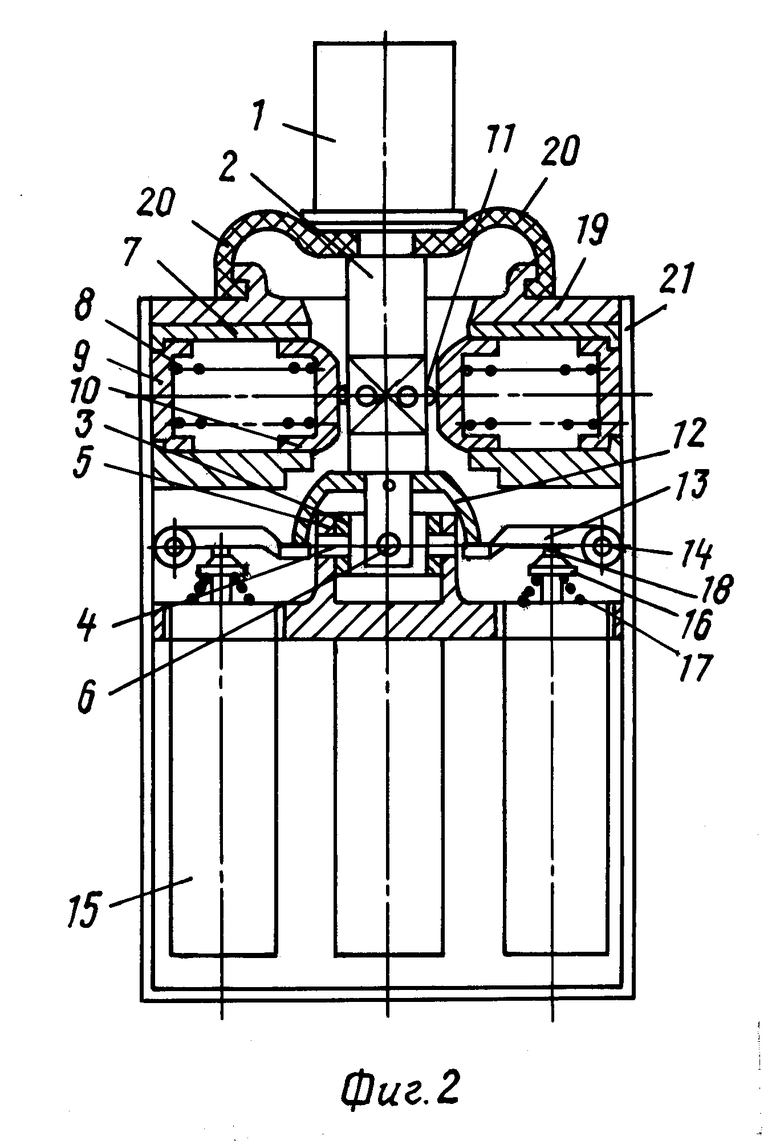
На фиг. 1 представлена схема расположения датчиков в прототипе, на фиг. 2 общий вид устройства предлагаемой боковой рукоятки управления, а на фиг. 3
схема расположения датчиков в ней.
Устройство содержит рукоятку 1, вал 2 которой связан с корпусом устройства через шарнир, выполненный, например, в виде кардана, рамка 3 которого закреплена на оси 4, установленной в нижней части корпуса, выполненной в виде фланца 5, причем на оси 6 рамки 3 установлен вал рукоятки 1. В средней, несущей, части 7 корпуса в четырех горизонтальных отверстиях, расположенных выше оси 6 вращения рукоятки и образующих четырехлучевую звезду, установлены комплекты механизмов загрузки, имитирующих пилоту аэродинамические нагрузки, возникающие на управляющих поверхностях соответствующих осей ЛА в полете. Каждый комплект содержит пружину 8 сжатия, опору 9, толкатель 10 механизма загрузки, имеющий снаружи сферическую поверхность.
Вал 2 в месте контакта с толкателями 10 выполнен в виде четырехгранника, в каждую грань которого завальцованы по два шарика 11. Под действием предварительно сжатых пружин 8 шарики 11 взаимодействуют с торцевой поверхностью соответствующего толкателя 10 механизма загрузки, при этом между сферическими поверхностями смежных толкателей образуется гарантированный зазор δ порядка 0,1 мм.
Каждая пара противоположных рядов шариков 11 образует линейные направляющие качения для перемещения рукоятки 1.
На валу рукоятки закреплен толкатель 12, выполненный, например, в виде усеченной полусферы, нижняя, торцевая, поверхность которого имеет точки соприкосновения с одноплечими рычагами 13, которые через оси 14 вращения связаны с корпусом устройства.
В корпусе устройства в двух взаимно перпендикулярных плоскостях концентрично относительно оси вала 2 установлены четыре сдвоенных индукционных датчика 15 поступательных перемещений, причем оси датчиков параллельны оси рукоятки в нейтральном положении. Сердечники 16 датчиков, подпружиненные пружинами 17 через шарики 18 сопрягаются с натягом с одноплечими рычагами 13, причем в нейтральном положении рукоятки оси 14 вращения рычагов 13, точки контактов шариков 18 с рычагами и толкателя 12 с рычагами 13, а также оси 4 и 6 вращения шарнира расположены в одной горизонтальной плоскости.
Для предохранения устройства от попадания влаги и/или пыли на верхней части корпуса, выполненной в виде крышки 19, закреплена резиновая манжета 20 и кожух 21.
Каждый датчик поступательных перемещений имеет по две первичные "а" и "в" и по две вторичные "c" и "d" обмотки (фиг. 3), причем первые первичные обмотки "а" и вторые первичные обмотки "в" первой 151 и 15II и второй 15III и 15IV пары датчиков, смещенных в пространстве по отношению друг к другу на 90o, соединены параллельно, Первые вторичные обмотки "с" диаметрально расположенных датчиков 15I и 15III образуют соответственно первый и второй резервы, а вторые вторичные обмотки "d" третий и четвертый резервы канала тангажа. Соответствующие обмотки датчиков 15II и 15IV образуют четыре резерва канала крена.
Предлагаемая конструкция устройства позволяет без принципиального ее изменения, а лишь за счет увеличения осевых габаритов выполнять боковую рукоятку управления с n-кратным резервированием путем наращивания числа обмоток датчиков управляющих сигналов перемещения.
Для удобства настройки устройства после его механической сборки и выставки "нулевого" сигнала каждого датчика 15 по каналам крена и тангажа при вертикальном, нейтральном, положении рукоятки 1 датчики установлены в корпусе 3 устройства на резьбе. Перемещая корпус датчика 15 по резьбе корпуса устройства (фланец 5), меняют тем самым его положение относительно сердечника 16 датчика, добиваясь минимального выходного сигнала датчика 15 в пределах допуска, после чего датчик жестко закрепляют в корпусе устройства.
Предлагаемая боковая рукоятка управления работает следующим образом.
В вертикальном, нейтральном, положении рукоятки 1 ее вал 2 фиксируется четырьмя толкателями 10 механизмов загрузки, при этом в выходных обмотках датчиков 15 поступательных перемещений индуцируются минимальные "нулевые" сигналы. Электронным блоком (на фиг. не показан) осуществляется питание обмоток возбуждения датчиков 15 напряжением высокой частоты и обработка выходных сигналов датчиков, формируются "нулевые" сигналы всех резервов каналов крена и тангажа в заданных пределах. При отклонении рукоятки 1 в направлении выбранной оси управления ЛА пружина 8 соответствующего механизма загрузки дополнительно сжимается, создавая усилие противодействия, пропорциональное углу ее отклонения. Толкатель 12 изменяет свое положение относительно плоскости, проходящей через оси вращения одноплечих рычагов 13, при этом рычаг, находящийся в плоскости направления выбранной оси управления ЛА, поворачивается вокруг своей оси, нажимая на соответствующий подпружиненный сердечник 16 датчика 15 поступательного перемещения. На выходе датчика 15 появляется соответствующий сигнал, пропорциональный величине хода сердечника 16 датчика. Одновременно противоположный одноплечий рычаг 13 поворачивается вокруг своей оси 14, отслеживая перемещение толкателя 12 под действием пружины 17, находящейся на сердечнике 16 датчика 15. На выходе датчика появляется сигнал, пропорциональный ходу сердечника, но противоположный по знаку сигналу диаметрально расположенного датчика. Одновременно толкатель 10 второго механизма загрузки, противоположного нагруженному, под действием предварительно сжатой пружины 8 смещается в сторону первого механизма загрузки на величину указанного выше гарантированного зазора d и после контактного взаимодействия с одним или двумя смежными толкателями механизмов загрузки блокируется в этом положении.
При возвращении рукоятки 1 в первоначальное, нейтральное, положение толкатели 10 механизмов загрузки также возвращаются в первоначальное положение, т. к. величина сил трения между сферическими поверхностями самоустанавливающихся толкателей и шариками 11, расположенными в верхней четырехгранной части вала 2, незначительна.
Перемещение рукоятки 1 в промежуточном направлении между осями управления вызывает увеличение усилия из-за необходимости осуществления пилотом пересиливания пружин 8 двух механизмов загрузки одновременно, при этом два ненагруженных механизма загрузки блокируют друг друга.
Источники информации
1. Заявка ФРГ N 2842842, кл. B 64 C 13/04, 1980.
2. Заявка ФРГ N 3825809, кл. B 64 C 13/04, 1988.
3. Патент Франции N 2583017, кл. B 64 C 13/12, 1986.
4. Заявка СССР N 4929881/23, решение о выдаче патента РФ от 20.07.93, кл. B 64 C 13/04, 1991 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БОКОВАЯ РУКОЯТКА УПРАВЛЕНИЯ | 1991 |
|
RU2018458C1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2076447C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 1992 |
|
RU2069037C1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2075822C1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2075820C1 |
| РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2018459C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВАЛОМ ДАТЧИКА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ СТОЙКИ ШАССИ САМОЛЕТА | 1992 |
|
RU2097271C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 1992 |
|
RU2070140C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2075821C1 |

Использование: в системах дистанционного управления летательного аппарата и наземных транспортных средств. Сущность изобретения: устройство содержит рукоятку, вал которой, связанный с корпусом через шарнир, при ее вертикальном, нейтральном, положениях фиксируется четырьмя толкателями механизма загрузки, расположенного в горизонтальной плоскости выше оси вращения рукоятки. В корпусе в двух взаимно перпендикулярных плоскостях концентрично относительно оси вала установлены четыре сдвоенных индукционных датчика поступательных перемещений, причем их оси параллельны оси рукоятки в нейтральном положении. Подпружиненные сердечники датчиков через одноплечие рычаги, оси которых закреплены на корпусе, связаны с общим толкателем, закрепленным на валу рукоятки. Точки контакта сердечников и толкателя с рычагами, центр шарнира и оси рычагов расположены в одной горизонтальной плоскости при нейтральном положении рукоятки. Технический результат: повышение надежности и расширение возможности резервирования датчиков. 4 з. п. ф-лы, 3 ил.
| Заявка ФРГ N 2842842, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| СОДЕРЖАЩАЯ ОДНОНАПРАВЛЕННЫЕ ВОЛОКНИСТЫЕ ЛЕНТЫ ВОЛОКНИСТАЯ ЗАГОТОВКА ИЗ ПУЧКОВ АРМИРУЮЩИХ ВОЛОКОН И КОНСТРУКТИВНЫЙ ЭЛЕМЕНТ ИЗ КОМПОЗИТНОГО МАТЕРИАЛА | 2011 |
|
RU2583017C2 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| БОКОВАЯ РУКОЯТКА УПРАВЛЕНИЯ | 1991 |
|
RU2018458C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
