Изобретение относится к обучающим устройствам и может быть использовано в авиационном тренажеростроении или в других тренажерах динамических объектов для воспроизведения усилий на органах управления имитируемого объекта (самолета).
Известно устройство адаптивного имитатора загрузки на рычагах управления авиационного тренажера, воспроизводящее различные исследуемые характеристики посредством загрузочных цилиндров, связанных между собой через имеющее изменяемое соотношение плеч качалки, между которыми установлен дифференциальный механизм, а к штокам загрузочных цилиндров подключены регулируемые штоки [1].
Недостатком данного устройства является низкая эффективность обучения ручному управлению объектом, характеристики которого имитируются. Это связано с тем, что величина усилий, противодействующих перемещению ручки управления, не связана с качеством управления.
Кроме того, применение электрогидравлического привода воспроизведения усилий на органах управления значительно усложняет и удорожает конструкцию имитатора.
Наиболее близким к предложенному является адаптивный имитатор загрузки на рычагах управления авиационного тренажера, содержащий рычаг управления, например ручку управления с осью вращения и вилкой крепления, и загрузочное устройство.
Качество управления в известном имитаторе обеспечивается за счет кинематической связи рычага управления с датчиком его перемещений, вычислительным комплексом, системой управления двигателем и загрузочным устройством [2] - прототип.
Недостатком устройства является как сложность конструкции, так и ее удорожание за счет применения для воспроизведения усилий на органах управления электрогидравлического загрузочного устройства. Кроме того, применение в известном устройстве гидроцилиндров приводит к определенной инерционности имитатора загрузки, поскольку в реальном пилотируемом объекте применяется электрическое управление загрузочным устройством.
Задачей изобретения является повышение быстродействия, упрощение конструкции и удешевление стоимости адаптивного имитатора загрузки на рычагах управления авиационного тренажера при сохранении эффективности обучения ручному управлению.
Поставленная задача достигается тем, что в известном адаптивном имитаторе загрузки на рычагах управления авиационного тренажера, содержащем рычаг управления, например ручку управления, включающую ось вращения ручки управления с установленной на ней вилкой, при этом рычаг управления кинематически связан с датчиком его перемещений, вычислительным комплексом, системой управления двигателем и загрузочным устройством, он дополнен полой осью вращения вилки, выполненной заодно с вилкой, при этом полая ось вращения вилки и ось вращения ручки управления снабжены жестко установленными на них направляющими тросовой проводки сегментами загрузки, расположенными в двух перпендикулярных плоскостях, которые кинематически связаны с электродвигателями загрузочного устройства, например по тангажу и крену посредством тросовой проводки, при этом тросовая проводка проходит внутри полой оси вращения вилки.
Применение в имитаторе тросовой проводки для воспроизведения усилий на органах управления значительно упрощает и удешевляет конструкцию имитатора, а также повышает его быстродействие.
Вращение рычага управления в разных пространственных плоскостях обеспечивается за счет того, что полая ось вращения вилки, выполненная заодно с вилкой, и ось вращения ручки управления снабжены жестко установленными на них направляющими тросовой проводки сегментами загрузки, расположенными в двух перпендикулярных плоскостях. При этом эффективность имитатора механизма загрузки обеспечивается кинематической связью рычага управления с датчиком его перемещений, вычислительным комплексом, а также системой управления двигателем.
Перемещение ручки управления передаются полой оси вращения вилки тросовой проводкой, проходящей внутри полой оси вращения вилки по направляющим тросовой проводки сегментам загрузки.
Выполнение вилки заодно с полой осью позволяет направить тросовую проводку внутри полой оси для обеспечения режима имитации нагрузок по тангажу, что, кроме того, уменьшает габариты имитатора загрузочного устройства.
Предложенное изобретение поясняется чертежами.
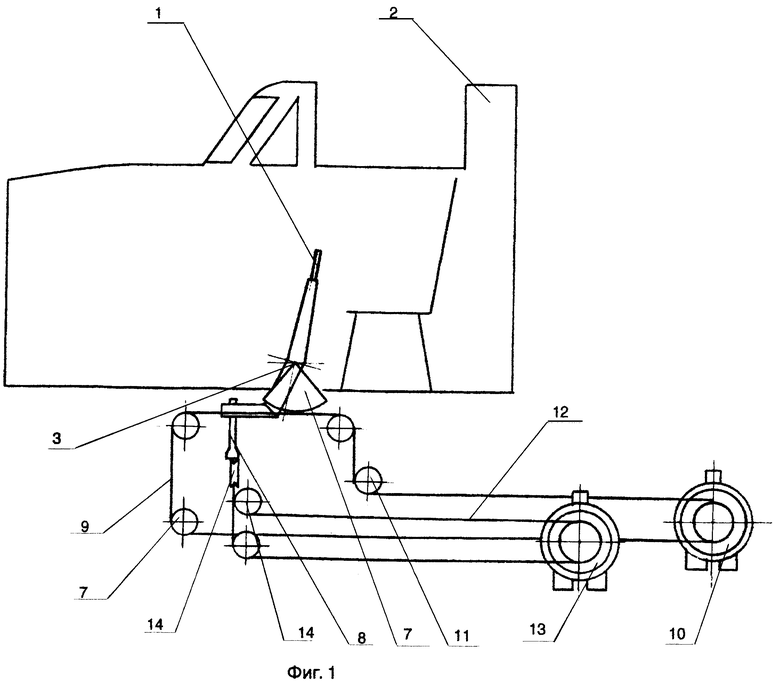
На фиг.1 представлен адаптивный имитатор загрузки на рычагах управления авиационного тренажера;
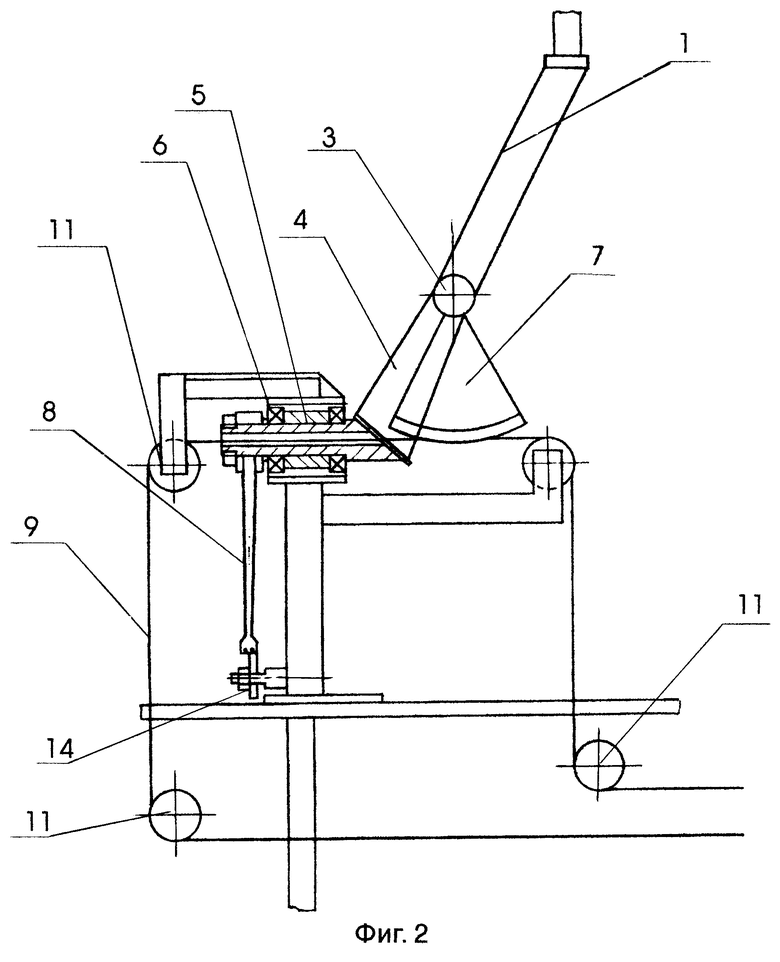
на фиг.2 - ручка управления самолетом;
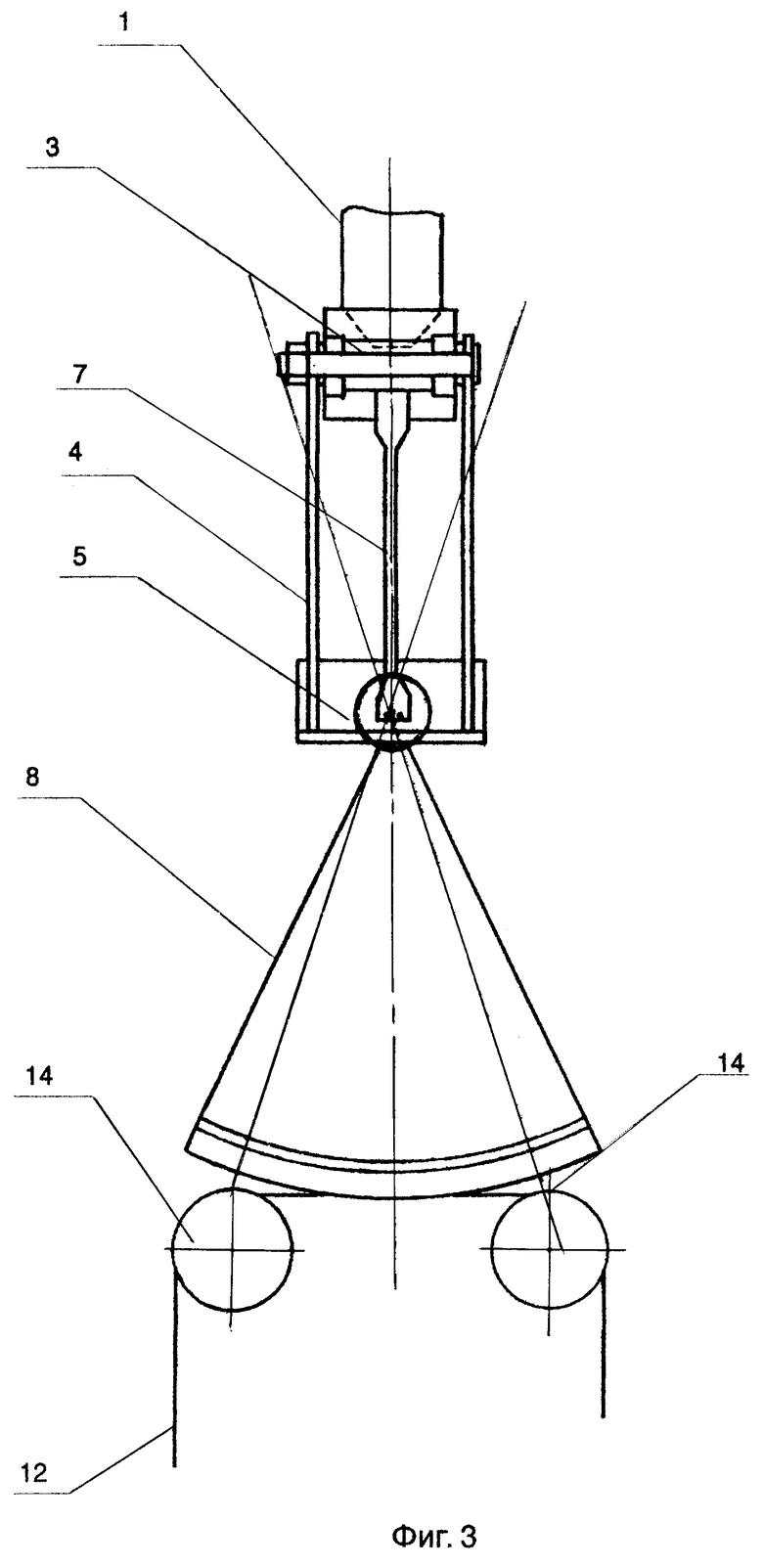
на фиг.3 - сегменты загрузки по тангажу и крену;
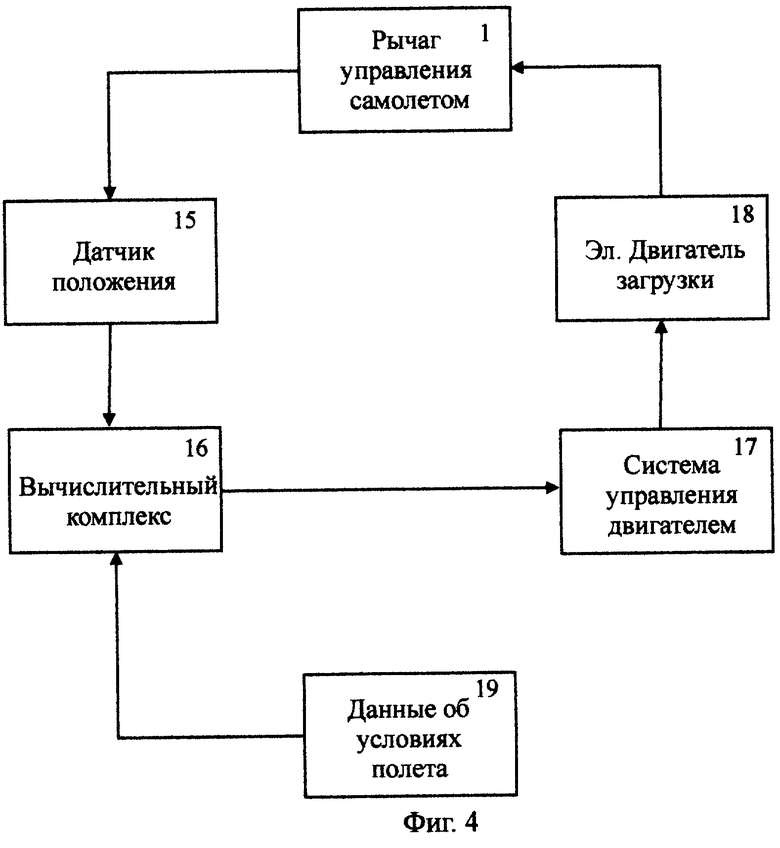
на фиг.4 - схема кинематической связи рычага управления с датчиком положения, вычислительным комплексом, системой управления двигателем и электродвигателями загрузки.
Принципиально адаптивный имитатор загрузки на рычагах управления, например педалей или ручки управления самолетом, представляет собой схему, преобразующую сигналы, вырабатываемые датчиком положения, в противодействующие усилия для педалей и/или ручки управления самолетом 1 (фиг.1, 4).
Ручка управления 1 жестко закреплена в кабине 2 на оси вращения ручки управления 3 (см. фиг.2) с установленной на ней вилкой 4, выполненной заодно целое с полой осью вращения вилки 5. Ось 5 установлена в подшипниках 6. На осях вращения ручки управления 3 и полой осью вращения вилки 5 жестко установлены сегменты загрузки 7 и 8 по тангажу и крену, при этом сегменты 7 и 8 расположены в двух перпендикулярных плоскостях (фиг.3).
Ось вращения ручки управления 3 с сегментом загрузки по тангажу 7 передает нагрузки от электродвигателя 10 на ручку управления 1 при ее отклонении по тангажу из нейтрального положения вперед или назад.
Полая ось вращения вилки 5 с сегментом загрузки 8 соответственно передает нагрузки при отклонении ручки управления 1 по крену из нейтрального положения влево или вправо.
При этом сегмент загрузки по тангажу 7 кинематически связан проводкой 9, жестко закрепленной на нем, с электродвигателем 10. При этом проводка 9 проходит по направляющим роликам 11 внутри полой оси 5.
Сегмент 8 загрузки по крену кинематически связан тросовой проводкой 12 с электродвигателем 13. При этом проводка 12 проходит по направляющим роликам 14 и жестко крепится на сегменте 8.
Устройство работает следующим образом.
По усилию, заданному в соответствии с режимом имитируемого полета и величиной отклонения командного рычага от нейтрального положения, в устройстве решается уравнение загрузки командного рычага 1 (педалей и/или ручки управления самолетом) (см. фиг.4), исходные данные для которого поступают с датчика положения 15.
Вычислительный комплекс 16, решая уравнение загрузки, выдает сигнал в систему управления двигателем 17, которая управляет электродвигателем загрузки 18, подавая на него управляющие сигналы для создания момента, обеспечивающие загрузку механизма адаптивного имитатора в соответствии с режимом имитируемого полета, представленным данными об условиях полета 19 (высота полета, скорость и др.) и величиной отклонения командного рычага от нейтрального положения.
По тросовой проводке 9, 12 момент от вращения электродвигателей 10, 13 передается через направляющие ролики 11, 14 и полую ось 5, загрузочные сегменты 7, 8 на ручку управления 1, вызывая на ней соответствующее усилие. Пока ручка управления 1 находится в нейтральном положении, противодействующее усилие, препятствующее перемещению ручки 1, отсутствует. При увеличении угла отклонения противодействующее усилие возрастает в соответствии с загрузочной характеристикой и режимом полета. Загрузочное устройство вырабатывает противодействующее усилие для ручки управления 1, зависящее от величины ее перемещения и заданных условий полета имитируемого самолета.
Опытный образец предложенного устройства изготовлен и прошел успешное испытание на тренажерном стенде, разработанном ЗАО “АЭРОМАШ”, г. Минск. Предложенное устройство используется ЗАО “АЭРОМАШ” в тренажерной технике.
Источники информации
1. А.с. СССР № 490156, G 09 B 9/08, от 11.04.74, oпубл. бюл. № 40, 30.10.75.
2. Заявка РФ № 94013430, G 09 B 9/08, от 18.04.94, oпубл. бюл. № 6, 27.02.96 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2263352C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| ИМИТАТОР ЗАГРУЗКИ РЫЧАГА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2005 |
|
RU2290619C2 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| ПРИБОРНАЯ ДОСКА КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА | 2002 |
|
RU2267815C2 |
| ТРЕНАЖЕР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2359334C1 |
| КРЕСЛО ПИЛОТАЖНОГО ТРЕНАЖЕРА С ИМИТАТОРАМИ ВИБРАЦИЙ И ШУМА | 2002 |
|
RU2249253C2 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2089447C1 |
| КОМПЛЕКСНЫЙ АВИАЦИОННЫЙ ТРЕНАЖЕР И СПОСОБ ИМИТАЦИИ ПОЛЕТА | 2016 |
|
RU2737246C2 |
| СИСТЕМА ЗАГРУЗКИ РЫЧАГОВ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2005 |
|
RU2298836C2 |
Изобретение относится к обучающим устройствам и может быть использовано в тренажерах динамических объектов для воспроизведения усилий на органах управления имитируемого объекта. Имитатор загрузки содержит рычаг управления, датчик перемещений рычага управления, вычислительный комплекс, систему управления двигателем и загрузочным устройством. Рычаг выполнен в виде ручки управления и включает ось вращения ручки с установленной на ней вилкой. Рычаг дополнен полой осью вращения вилки, выполненной заодно с вилкой. Полая ось вращения вилки и ось вращения ручки управления снабжены жестко установленными на них направляющими тросовой проводки сегментами загрузки, расположенными в двух перпендикулярных плоскостях. Сегменты загрузки связаны с электродвигателями загрузочного устройства. Изобретение позволяет повысить быстродействие и упростить конструкцию адаптивного имитатора загрузки. 4 ил.
Адаптивный имитатор загрузки на рычагах управления авиационного тренажера, содержащий рычаг управления, например, ручку управления, включающую ось вращения ручки управления с установленной на ней вилкой, при этом рычаг управления кинематически связан с датчиком его перемещений, вычислительным комплексом, системой управления двигателем и загрузочным устройством, отличающийся тем, что он дополнен полой осью вращения вилки, выполненной заодно с вилкой, при этом полая ось вращения вилки и ось вращения ручки управления снабжены жестко установленными на них направляющими тросовой проводки сегментами загрузки, расположенными в двух перпендикулярных плоскостях, которые кинематически связаны с электродвигателями загрузочного устройства, например, по тангажу и крену посредством тросовой проводки, при этом тросовая проводка проходит внутри полой оси вращения вилки.
| US 4568286 А, 04.02.1986 | |||
| Сварной корпус турбомашины | 1983 |
|
SU1116188A1 |
| SU 1123408 A1, 27.01.1996 | |||
| RU 94013430 A1, 27.02.1996. | |||

