Изобретение относится к средствам управления летательным аппаратом (ЛА) по тангажу и крену. Устройство предназначено для работы в составе электродистанционной системы управления ЛА.
Известна боковая ручка управления самолета (БРУ) А-320, которая располагается на боковой горизонтальной панели [Airbus, A319/A320/A321 Flightdeck and systems briefing for pilots, Airbus Industries, STL 945.7136/97, 1998]. В кабине А-320 установлены две таких ручки: одна для командира воздушного судна, другая для второго пилота. Каждая ручка оснащена загрузочными пружинами и находится в нейтральном положении при отсутствии управляющего воздействия со стороны летчика, то есть является пассивной. В боковых ручках А-320 имеются только датчики положения ручек, и реализовано электронное суммирование управляющих сигналов для того, чтобы дать одному из пилотов корректировать действия другого. При одновременном отклонении рукояток управляющий сигнал равен алгебраической сумме сигналов, но не превышает максимального сигнала с одной из БРУ. Однако при одновременном управлении обоими пилотами в процессе полета может сложиться ситуация, в которой управляющий сигнал практически обнуляется из-за того, что одна из рукояток отклонена влево, а другая вправо, то есть самолет, по сути, никем не управляется. Даже на короткое время возникновение такой ситуации очень опасно на режимах посадки, когда требуется точное пилотирование. Описанная ситуация возможна из-за того, что в пассивных БРУ нет однозначной позиционной связи между двумя ручками и рулевыми поверхностями.
На самолете Sukhoisuperjet 100 применяются боковые ручки, аналогичные применяющимся на А-320. Ручки SSJ 100 являются пассивными, и положение каждой из них не зависит от положения другой, а положение каждой из ручек выдается на индикатор. В устройствах также реализовано электронное суммирование управляющего сигнала, но каждый летчик имеет возможность блокировать сигнал управления другого летчика путем нажатия и удерживания в течение определенного времени кнопки приоритета, расположенной на рукоятке. Тем не менее, неоднозначность положений БРУ является существенным слабым местом с точки зрения безопасности полета. Необходимость контролировать положение органов управления по индикаторам также является существенным фактором, отвлекающим от пилотирования.
Указанный недостаток устраняется в конструкции, описанной в патенте ЕР 0522623 [Mechanically-linked side stick controllers with isolated pitch and roll. The Boeing Company. Patent Number: ЕР 0522623], в которой реализована механическая связь между рукоятками. Однако конструкция не лишена недостатков, в частности, рукоятки не оснащены загрузочными пружинами, что не дает пилотам актуальной осязательной информации о величине управляющего усилия.
Прототипом изобретения является конструкция, описанная в американском патенте US №5456428А от 10 октября 1995 г. [Mechanically linked active sidesticks. Honevwell Inc. US 5456428], в котором предлагается оснастить ручки управления электромоторами для обеспечения их синхронного отклонения. Также в системе реализована механическая обратная связь между рукоятками для того, чтобы дать пилотам возможность синхронно управлять самолетом и тактильно (осязательно) корректировать действия напарника, т.е. реализовано интуитивно-понятное пересиливание. Одним из достоинств является то, что система остается работоспособной даже в случае отключения электропитания приводных механизмов боковых ручек. Однако электромоторы, применяющиеся в данной конструкции, выполнены без редукторов, что не позволяет им развивать большие крутящие моменты. Прокладка механической проводки затруднена в кабинах существующих ЛА, а сама конструкция обладает весьма большими массогабаритными показателями, т.к. содержит в себе двигатели, механические передачи и шарниры в виде отдельных функциональных элементов.
Цели изобретения сводятся к уменьшению массогабаритных показателей, обеспечению летчиков актуальной тактильной информацией, расширению функциональных возможностей и, как следствие, повышению безопасности полета.
Поставленная цель достигается тем, что в боковой ручке управления самолетом, имеющей две вращательные степени свободы, включающей рукоятку, датчики усилия, карданный подвес с двумя степенями подвижности, основание, два электропривода, содержащих датчик положения, электродвигатель и механические передачи, согласно заявляемому изобретению, электроприводы выполнены в форме цилиндров, размещены один над другим так, что их продольные оси расположены под углом 90°, и образуют совместно с основанием кардан, при этом электроприводы выполнены одинаковыми, каждый электропривод содержит в себе цифровой датчик обратной связи, бескорпусной электродвигатель, механическую передачу в виде двухступенчатой волновой передачи с телами качения и с выходным жестким колесом; все элементы электропривода расположены соосно, вдоль продольной оси, при этом первая ступень волновой передачи с телами качения выполнена по схеме с выходным сепаратором, вторая ступень по схеме с выходным жестким колесом, вал ротора электродвигателя связан с входным валом первой ступени волновой передачи и выполнен пустотелым, сепаратор первой ступени выполнен с центральной осью, являющийся входным звеном второй ступени, сепаратор второй ступени образует единую деталь с жестким колесом первой ступени, выполнен с пазом, в котором размещается рычаг, связывающий жесткое колесо второй ступени с валом датчика обратной связи, первый электропривод крепится к кронштейнам основания, второй электропривод через соединительную стойку крепится к жесткому колесу первого электропривода, а к жесткому колесу второго электропривода по оси, проходящей через точку пересечения осей электроприводов, крепится основание рукоятки, на котором расположены датчики усилия, основание рукоятки соединено через шарнир со стержнем рукоятки
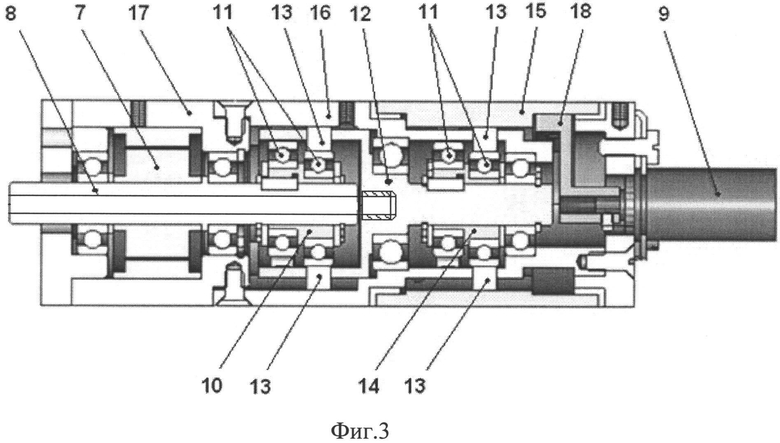
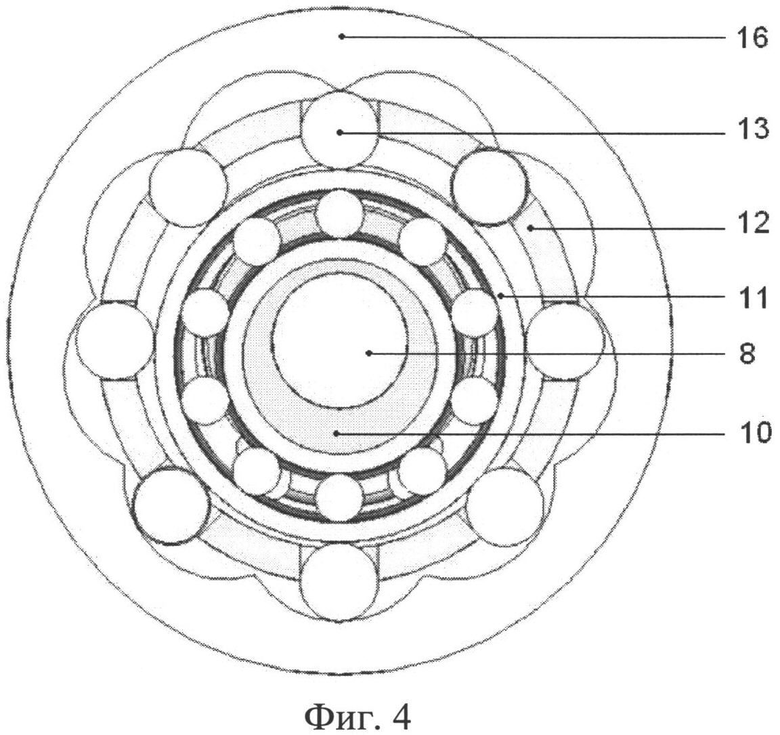
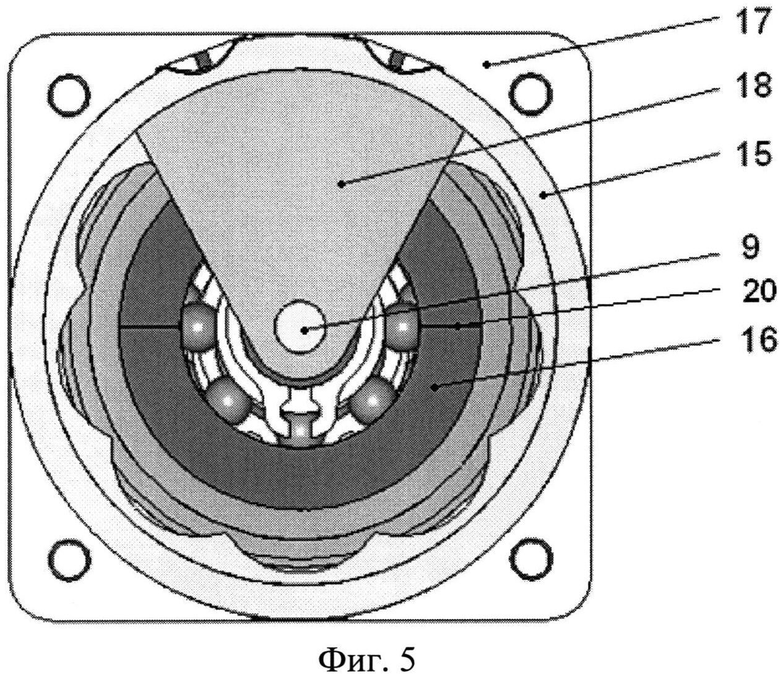
На фиг. 1 представлена функциональная схема БРУ. На фиг. 2 представлен общий вид предлагаемой БРУ. На фиг. 3 показан продольный разрез исполнительного механизма. На фиг. 4 показан поперечный разрез волновой передачи с телами качения. На фиг. 5 показан поперечный разрез узла крепления датчика положения. На фиг. 6 показан разрез узла установки датчиков усилия.
Боковая ручка управления (фиг. 2) имеет две вращательные степени свободы для управления по тангажу и крену. Устройство состоит из стержня рукоятки (1), четырех датчиков усилия (2), двух электроприводов (3), соединительной стойки (4), кронштейнов (5) и плиты (6). Кронштейны (5) и плита (6) соединены винтами и образуют основание устройства. Электроприводы (3) выполнены идентичными друг другу, соединены между собой с помощью стойки (4) таким образом, что продольные оси приводов являются скрещивающимися прямыми и образуют прямой угол. Сборочный узел из приводов и стойки, размещенный в кронштейнах основания, образует карданный подвес.
Элементы привода расположены соосно вдоль продольной оси. Каждый исполнительный механизм (фиг. 3) содержит в себе бескорпусной электродвигатель (7), ротор которого установлен на валу (8), датчик положения (9) и механические передачи в виде двухступенчатой волновой передачи с телами качения. Волновая передача с телами качения состоит из вала (8), на который установлен эксцентрик (10), который через подшипники (11) контактирует с сепаратором (12), посредством роликов(13). Сепаратор (12) выполнен с центральной осью, на которой установлен эксцентрик второй ступени (14). Сепаратор (12) имеет осевое профильное отверстие для подсоединения внешнего вала. Выходным звеном первой ступени является сепаратор (12), а выходным звеном второй ступени является жесткое колесо (15). Жесткое колесо первой ступени (16) выполнено единой деталью с сепаратором второй ступени. Жесткое колесо (16) жестко соединено с корпусом электродвигателя (17) с помощью винтов. При неподвижном жестком колесе (16) выходным элементом второй ступени является жесткое колесо (15), которое является выходным звеном исполнительного механизма. С внутренней стороны подвижное жесткое колесо (15) посредством рычага (18) связано с валом датчика обратной связи (9), а с внешней стороны к жесткому колесу (15) крепится пластина (19), являющаяся опорой стержня рукоятки (1). Жесткое колесо (15) имеет ограниченный угол поворота, так как рычаг (18) расположен в пазу жесткого колеса (16), а края паза (20) играют роль ограничительных упоров для рычага (18), соответственно, стержень рукоятки (1) также имеет ограниченный ход. Кольцо (21) служит дополнительной подвижной опорой для основания рукоятки (19), на котором расположены датчики усилия (2), и шарнир (22), с помощью которого на основании закреплен стержень рукоятки (1). Цилиндры (22), подпружиненные в пазах крестовины (24), установленной на стержне рукоятки (1), постоянно давят на датчики усилия (2). Этим достигается непрерывность снятия показаний с датчиков усилия (2), а наличие пружин (25) обеспечивает линейное нарастание сигнала с датчиков при отклонении рукоятки.
Боковые ручки управления работают следующим образом. При отсутствии управляющего сигнала рукоятка находится в положении, при котором произошло прекращение подачи сигнала.
В режиме задатчика положения рассмотрено управление для канала крена. (Для канала тангажа управление происходит аналогично). Для управления по каналу крена пилот отклоняет рукоятку (1) совместно с датчиками усилия (2) и с жестким колесом (15), которое связано с датчиком обратной связи (9). Сигналы с датчиков усилия (2) и с датчика обратной связи (9) попадают в блок управляющей электроники, который формирует управляющий сигнал для электродвигателей (7) обеих боковых ручек. По сути, не летчик совершает основную работу по перемещению рукоятки, а следящая система. Датчики усилия (2) необходимы для того, чтобы исключить перерегулирование при отклонении рукоятки из-за инерционной составляющей кинематической передачи. Таким образом, пилот создает управляющее усилие, приложенное к рукоятке, а управляющая электроника формирует управляющий сигнал для обеих ручек для их синхронного отклонения.
В режиме автоматического управления на двигатель (7) подается напряжение, пропорциональное разнице между текущим и требуемым положением. Текущее положение оценивается с помощью датчика обратной связи (9), а требуемое формируется в вычислительном устройстве.
Цели изобретения достигаются за счет введения дополнительного входа для механической проводки, что расширяет функциональные возможности органа управления, а также применения электродвигателей и кинематических передач, для синхронной работы двух боковых ручек, и обеспечивающих достаточное усилие для имитации механической обратной связи между летчиками, для реализации пересиливания. С помощью датчиков усилия достигается повышение чувствительности и устранение перерегулирования из-за инерционной составляющей движения при работе привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| Боковая ручка управления (варианты) | 2017 |
|
RU2681462C1 |
| Устройство для управления тягой маршевого двигателя ЛА | 2023 |
|
RU2801625C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| ИНЦЕПТОР КОМПЛЕКСНОГО ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУШНЫМ И НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2593185C1 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ УЧЕБНО-ТРЕНИРОВОЧНОГО САМОЛЕТА | 1993 |
|
RU2093419C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |


Изобретение относится к средствам управления летательным аппаратом (ЛА) по тангажу и крену. Боковая ручка управления содержит рукоятку, датчики усилия, карданный подвес с двумя степенями подвижности, основание, два электропривода в форме цилиндра, соединенные определенным образом. Каждый электропривод содержит датчик положения, электродвигатель, механическую передачу в виде двухступенчатой волновой передачи с телами качения и выходным жестким колесом, цифровой датчик обратной связи, бескорпусный электродвигатель, расположенные определенным образом. Первая ступень волновой передачи содержит выходной сепаратор, вторая ступень - выходное жесткое колесо. Обеспечивается повышение безопасности полета и уменьшение массогабаритных показателей. 6 ил.
Боковая ручка управления самолетом, имеющая две вращательные степени свободы, включающая рукоятку, датчики усилия, карданный подвес с двумя степенями подвижности, основание, два электропривода, содержащих датчик положения, электродвигатель и механические передачи, отличающаяся тем, что электроприводы выполнены в форме цилиндров, размещены один над другим так, что их продольные оси расположены под углом 90°, и образуют совместно с основанием кардан, при этом электроприводы выполнены одинаковыми, каждый электропривод содержит в себе цифровой датчик обратной связи, бескорпусной электродвигатель, механическую передачу в виде двухступенчатой волновой передачи с телами качения с выходным жестким колесом; все элементы электропривода расположены соосно, вдоль продольной оси, при этом, первая ступень волновой передачи с телами качения выполнена по схеме с выходным сепаратором, вторая ступень по схеме с выходным жестким колесом, вал ротора электродвигателя связан с входным валом первой ступени волновой передачи и выполнен пустотелым, сепаратор первой ступени выполнен с центральной осью, являющийся входным звеном второй ступени, сепаратор второй ступени образует единую деталь с жестким колесом первой ступени, выполнен с пазом, в котором размещается рычаг, связывающий жесткое колесо второй ступени с валом датчика обратной связи, первый электропривод крепится к кронштейнам основания, второй электропривод через соединительную стойку крепится к жесткому колесу первого электропривода, а к жесткому колесу второго электропривода по оси, проходящей через точку пересечения осей электроприводов, крепится основание рукоятки, на котором расположены датчики усилия, основание рукоятки соединено через шарнир со стержнем рукоятки.
| US 5456428 A1, 10.10.1995 | |||
| RU 2011136027 A, 10.03.2013 | |||
| Устройство для регулирования скорости клиноременного вариатора | 1955 |
|
SU114939A1 |
| 0 |
|
SU278746A1 | |

