Изобретение относится к радиотехнике и может быть использовано в дальномерном канале радиотехнических систем ближней навигации (РСБН).
Известен комплексный дальномер, содержащий последовательно соединенные временной различитель, первый интегратор, первый сумматор, второй сумматор, второй интегратор, формирователь импульсов и формирователь следящих стробов. Выход формирователя следящих стробов соединен с одним из входов временного различителя. На второй вход второго сумматора через согласующий фильтр поступает сигнал с выхода типового нерадиотехнического измерителя. Кроме того, выход временного различителя через усилитель соединен с вторым входом первого сумматора.
Одной из основных причин, препятствующих достижению требуемого технического результата при использовании комплексного дальномера является то, что в известном устройстве сигнал с выхода нерадиотехнического измерителя скорости, поступающий на второй вход второго сумматора, помимо полезной информации имеет большие ошибки измерения путевой скорости, которые далее никак не учитываются. Кроме того, область применения данного устройства ограничена. В частности, оно может быть применено лишь при установке его на неподвижные либо движущиеся равномерно прямолинейно объекты. В противном случае (например, при установке его на летательный аппарат) возникают большие динамические ошибки, приводящие к снижению точности измерения дальности.
Наиболее близким техническим решением является комплексный измеритель дальности с взаимной коррекцией, содержащий последовательно соединенные синхронный детектор, временной различитель, первый усилитель, первый интегратор, первый сумматор, второй интегратор, формирователь импульсов и формирователь следящих стробов, выход которого соединен с вторым входом временного различителя, последовательно соединенные управляющий элемент и перестраиваемый генератор, выход которого соединен с вторым входом синхронного детектора, а вход управляющего элемента соединен с выходом второго интегратора, последовательно соединенные измеритель скорости, первый вычитатель, второй усилитель, второй сумматор, третий интегратор, второй вычитатель, выход которого через масштабирующий усилитель соединен с вторым входом первого вычитателя, последовательно соединенные третий усилитель, третий сумматор, четвертый интегратор, выход которого соединен с вторым входом второго вычитателя, а вход третьего усилителя соединен с выходом первого вычитателя. Кроме того, выход временного различителя через первый и второй усилители коррекции соединен с вторыми входами второго и третьего сумматоров соответственно, а выход третьего индикатора соединен с вторым входом первого сумматора.
Известный комплексный измеритель дальности с взаимной коррекцией обладает недостаточной для решения практических задач самолетовождения точностью и помехоустойчивостью. Причиной, препятствующей достижению требуемого технического результата при использовании известного устройства, в основном являются большие погрешности, содержащиеся в корректирующих сигналах, подаваемых на входы первого, второго и третьего сумматоров комплексного измерителя дальности, которые обусловлены тракторными нестабильностями летательного аппарата (ЛА), турбулентностью атмосферы, флуктуациями тяги двигателя и т.п.
Целью изобретения является высокоточное определение местоположения ЛА при различных условиях полета путем измерения дальности до двух и более РМ, что позволяет своевременно осуществлять коррекцию текущих координат его местоположения, определяемых методом счисления пути, и тем самым обеспечить дополнительное снижение расхода топливных и энергетических ресурсов ЛА и повышение безопасности полетов.
Технический результат, который может быть получен при осуществлении изобретения, выражается в повышении точности и помехоустойчивости измерения дальности до РМ (например, РМ РСБН). При этом, как показывает результаты машинного моделирования на математической модели предлагаемой системы, точность измерения дальности возрастает в 1,5-2 раза в зависимости от отношения сигнал/шум. При определении помехоустойчивости предлагаемой системы исследовались характеристики срыва слежения. Величина критического отношения сигнал/шум, при котором происходит срыв слежения, в данной системе в 1,4-1,6 раза меньше, чем в прототипе.
Указанный технический результат при осуществлении изобретения достигается тем, что в известную комплексную систему измерения дальности, содержащую последовательно соединенные синхронный детектор, временной различитель, первый усилитель, первый интегратор, первый сумматор, последовательно соединенные управляющий элемент, перестраиваемый генератор, выход которого соединен с вторым входом синхронного детектора, последовательно соединенные формирователь импульсов, формирователь следящих стробов, выход которого соединен с вторым входом временного различителя, последовательно соединенные измеритель скорости, вычитатель, второй усилитель, второй интегратор, последовательно соединенные третий усилитель, третий интегратор, при этом вход третьего усилителя соединен с выходом вычитателя, масштабирующий усилитель, выход которого соединен с вторым входом вычитателя, введены последовательно соединенные фазовый детектор, схема совпадения, второй вход которой соединен с выходом формирователя импульсов, четвертый интегратор, четвертый усилитель, выход которого соединен с вторым входом первого сумматора, фазовращатель, вход которого соединен с выходом перестраиваемого генератора, а выход - с вторым входом фазового детектора пятый, шестой, седьмой и восьмой усилители, входы которых объединены и соединены с выходом четвертого интегратора, девятый, одиннадцатый и двенадцатый усилители, входы которых объединены и соединены с выходом первого интегратора, второй, третий, четвертый и пятый сумматоры, первые входы которых соединены с выходами соответственно девятого десятого, одиннадцатого и двенадцатого усилителей, а вторые входы этих сумматоров соединены соответственно с выходами пятого, шестого, седьмого и восьмого усилителей, последовательно соединенные тринадцатый усилитель, пятый интегратор, шестой сумматор, шестой интегратор, выход которого соединен с входом масштабирующего усилителя, схема выборки с запоминанием, выход которой соединен с вторым входом шестого сумматора, а ее вход соединен с выходом четвертого сумматора, генератор тактовых импульсов, выход которого соединен с управляющими входами первого, второго, третьего, четвертого, пятого, шестого интеграторов и схемы выборки с запоминанием, вход формирователя импульсов и третий вход первого сумматора объединены и соединены с выходом второго интегратора, вход управляющего элемента и третий вход пятого сумматора объединены и соединены с выходом третьего интегратора, вход тринадцатого усилителя и третий вход третьего сумматора объединены и соединены с выходом пятого интегратора, третьи входы второго и четвертого сумматоров соединены соответственно с выходами шестого интегратора и схемы выборки с запоминанием, а выходы первого, второго, третьего и пятого сумматоров соединены с входами установки начальных условий второго, шестого, пятого и третьего интеграторов соответственно, при этом первые входы синхронного и фазового детекторов объединены и являются входом комплексной системы измерения дальности, а выход второго интегратора - ее выходом.
В данном техническом решении предлагается использование модели изменения навигационных параметров, в частности дальности до радиомаяка (РМ/D(t), которая инвариантна к динамике и траектории полета ЛА, что снимает указанные ограничения, связанные с приближенным характером задания его математической модели. Это является принципиальным отличием предлагаемого технического решения от прототипа и обусловливает повышение точности и помехоустойчивости измерителя дальности. Физическая сущность предлагаемого технического решения состоит в использовании сигнала с выхода измерителя скорости (ИС) в качестве управляющего, причем оцениванию (в отличие от прототипа) подлежит лишь D(t) и составляющие погрешности соответствующего ИС. При этом выбор типа ИС не является принципиальным. В предлагаемом техническом решении в качестве ИС используется инерциальная навигационная система (ИНС), позволяющая измерять путевую скорость W ЛА. С учетом отмеченного динамика изменения навигационного параметра D может быть описана уравнениями вида = Wи(t) - Ew(t) , D(to) = Do
= Wи(t) - Ew(t) , D(to) = Do = Δ(t) + Ea(t), Ew(to) = E
= Δ(t) + Ea(t), Ew(to) = E
 = -θaKa(t) + (2θaσ
= -θaKa(t) + (2θaσ = 0 , Δ(to)=Δo (1) где EW(t) и Еa(t); Δ (t) - ошибки измерения скорости и ускорения ЛА соответственно;
= 0 , Δ(to)=Δo (1) где EW(t) и Еa(t); Δ (t) - ошибки измерения скорости и ускорения ЛА соответственно;
θa и σa2 - параметр, характеризующий ширину спектра флуктуационных ошибок Еа(t), и их дисперсия соответственно.
Другой физической предпосылкой дальнейшего повышения точности и помехоустойчивости известного дальномера является использование информации о D(t), содержащейся в фазе принимаемого радиосигнала. При этом необходимо учесть флуктуации фазы принимаемого радиосигнала, обусловленные доплеровским смещением частоты из-за подвижности ЛА и естественной нестабильностью частоты задающего генератора. Эти основные факторы, обуславливающие изменение фазы принимаемого радиосигнала достаточно полно могут быть учтены уравнением вида = -
= - 
 + (0,5 Nф)-0,5nф(t), Ф(to)= Фo, (2) где ω и Ф(t) - несущая частота и случайная фаза радиосигнала;
+ (0,5 Nф)-0,5nф(t), Ф(to)= Фo, (2) где ω и Ф(t) - несущая частота и случайная фаза радиосигнала;
с - скорость распространения радиоволн;
NФ - характеризует естественные нестабильности частоты задающего генератора.
Входящие в уравнения (1) и (2) na(t) и nф(t) представляют собой взаимонезависимые белые гауссовские шумы.
На чертеже представлена электрическая структурная схема комплексной системы измерения дальности.
Комплексная система измерения дальности содержит последовательно соединенный синхронный детектор СД 1, временной различитель ВР 2, первый усилитель УС 3, первый интегратор (И) 4, первый сумматор (СУМ) 5, последовательно соединенный фазовый детектор ФД 6, схему совпадения СС 7, четвертый И 8, четвертый УС 9, выход которого соединен с вторым входом первого СУМ 5, пятый УС10, шестой УС11, седьмой УС12 и восьмой УС13, входы которых объединены и соединены с выходом четвертого И8, девятый УС14, десятый УС 15, одиннадцатый УС 16 и двенадцатый УС 17, входы которых объединены и соединены с выходом первого Н4, второй СУМ 18, третий СУМ 19, четвертый СУМ 20 и пятый СУМ 21, первые входы которых соединены с выходами соответственно девятого УС 14, десятого УС 15, одиннадцатого УС 16 и двенадцатого УС 17, а вторые входы этих сумматоров соединены соответственно с выходами пятого УС 10, шестого УС 11, седьмого УС 12 и восьмого УС 13, последовательно соединенные измеритель скорости НС 22, вычитатель В 23, второй УС 24, второй Н 25, формирователь импульсов ФИ 26, выход которого соединен с вторым входом СС 17, последовательно соединенные третий УС 27, вход которого соединен с выходом В 23, третий И 28, управляющий элемент УЭ 29, перестраиваемый генератор ПГ 20, выход которого соединен с вторым входом СД1 и через фазовращатель ФВ 31 - с вторым входом ФД6, формирователь следящих стробов ФСС 32, вход которого соединен с выходом ФИ 26, а выход - в вторым входом ВР 2, последовательно соединенные тринадцатый УС 33, пятый И 34, шестой СУМ 35, шестой И 36, масштабирующий усилитель МУ 37, выход которого соединен с вторым входом В 23, схема выборки с запоминанием СВ 38, выход которой соединен с вторым входом шестого СУМ 35, а ее вход соединен выходом четвертого СУМ 20, генератор тактовых импульсов ГТИ 39, выход которого соединен с управляющими входами первого И 4, второго И 25, третьего И 28, четвертого И 8, пятого И 34, шестого И 36 и СВ 38, при этом третьи входы первого СУМ 5, второго СУМ 18, четвертого СУМ 20 и пятого СУМ 21 соединены с выходами второго И 25, шестого И 36, СВ 388 и третьего Н 28 соответственно, третий вход третьего СУМ 19 и вход тринадцатого УС 33 объединены и соединены с выходом пятого И 34, выходы первого СУМ 5, второго СУМ 18, третьего СУМ 19 и пятого СУМ 21 соединены соответственно с входами установки начальных условий второго И 25, шестого И 36, пятого И 34 и третьего И 28. Кроме того, первые входы СД1 и ФД6 объединены и являются входом комплексной системы измерения дальности, а выход второго И 25 является ее выходом.
Система работает следующим образом.
Входной радиосигнал ζ1 (t), содержащий информацию о дальности до РМ, и сигнал с выхода П1 30 поступают на СД1. Выходное напряжение СД1 в виде видеоимпульса подается на ВР 2, на второй вход которого с выхода ФСС 32 поступают следующие импульсы, соответствующие раннему и позднему стробам, ось симметрии которых соответствует ожидаемой симметрии импульса от РМ. ВР 2 формирует напряжение, характеризующее отклонение видеоимпульса относительно оси симметрии следящих импульсов. Напряжение с выхода ВР2 через первый УС 3 подается на вход первого И 4, выходное напряжение которого подается на первый вход первого СУМ 5, а также через девятый УС 14, десятый УС 15, одиннадцатый УС 16, двенадцатый УС 17 - на первые входы второго СУМ 18, третьего СУН 19, четвертого СУМ 20, пятого СУМ 21, соответственно и используется для коррекции оцениваемых значений D*(t), EW*(t), Fа*(t), Δ *(t) и Ф*(t). Кроме того, радиосигнал ζ1 (t) поступает на вход ФД6, на второй вход которого подается опорный сигнал с выхода ФВ 31, осуществляется поворот на π/2 фазы сигнала, снимаемого с выхода ПГ 30. Выходное напряжение ФД 6 подается на первый вход СС 7, на второй вход которой с выхода ФИ 26 поступает импульс, осуществляющий стробирование канала измерения Ф(t). Напряжение, величина которого определяется фазовым рассогласованием между входным ζ (t) и опорным радиосигналами, с выхода СС7 подается на четвертый И8. Выходное напряжение И8 аналогично напряжению на выходе И4, используется далее для коррекции оцениваемых процессов. С весьма, определяемыми коэффициентами передачи четвертого УС9, пятого УС10, шестого УС11, седьмого УС12 и восьмого УС13, указанное напряжение прикладывается к вторым входам первого СУМ 5, второго СУМ 18, третьего СУМ 19, четвертого СУМ 20 и пятого СУМ 21, на третьи входы которых подаются напряжению, пропорциональные соответственно значениям D*(t), EW*(t), Ea*(t), Δ*(t) и Ф*(t).
Введение перекрестных связей по ошибкам слежения за соответствующими параметрами между дальномерным каналом и каналом фазовой автоподстройки способствует дополнительному сужению полосы пропускания следящего измерителя. Уточненные значения D*(t), EW*(t), Eа*(t), Δ*(t) и Ф*(t) ( t),
t), (t),
(t),  a(t),
a(t),  (t) и
(t) и  (t)) с выходов первого СУМ 5, второго СУМ 18, третьего СУМ 19 и пятого СУМ 21 в виде напряжения подаются на входы установки начальных условий соответственно второго И25, шестого И36, пятого И34 и третьего И28, а выходное напряжение четвертого СУМ 20, пропорциональное уточненному значению Δ*(t)(
(t)) с выходов первого СУМ 5, второго СУМ 18, третьего СУМ 19 и пятого СУМ 21 в виде напряжения подаются на входы установки начальных условий соответственно второго И25, шестого И36, пятого И34 и третьего И28, а выходное напряжение четвертого СУМ 20, пропорциональное уточненному значению Δ*(t)( (t)) поступает на схему выборки с запоминанием СВ38, управление которыми, а также СВ38 осуществляется тактовыми импульсами (ТИ), вырабатываемыми ГТИ 39 и подаваемыми на их управляющие входы. Момент прихода очередного ТИ определяется максимально возможной величиной запаздывания входного импульсного сигнала ζ1 (t), а период следования ТИ равен периоду повторения ζ1 (t). Пpи поступлении очередного ТИ осуществляется сброс интеграторов в начальное состояние, которое определяется соответствующим напряжением, прикладываемым к входу установки начальных условий каждого из них. На вход В23 с выхода ИС22, в качестве которого в данном случае используется типовая ИНС, поступает сигнал ζ2 (t), несущий информацию о путевой скорости ЛА. Помимо этого сигнал ζ2t содержит ошибку измерения скорости FW(t), обусловленную медленно меняющейся ошибкой акселерометра, начальной выставкой гироплатформы, нескомпенсированным дрейфом гигроскопов ИНС, а также шумовой составляющей ошибки акселерометров.
(t)) поступает на схему выборки с запоминанием СВ38, управление которыми, а также СВ38 осуществляется тактовыми импульсами (ТИ), вырабатываемыми ГТИ 39 и подаваемыми на их управляющие входы. Момент прихода очередного ТИ определяется максимально возможной величиной запаздывания входного импульсного сигнала ζ1 (t), а период следования ТИ равен периоду повторения ζ1 (t). Пpи поступлении очередного ТИ осуществляется сброс интеграторов в начальное состояние, которое определяется соответствующим напряжением, прикладываемым к входу установки начальных условий каждого из них. На вход В23 с выхода ИС22, в качестве которого в данном случае используется типовая ИНС, поступает сигнал ζ2 (t), несущий информацию о путевой скорости ЛА. Помимо этого сигнал ζ2t содержит ошибку измерения скорости FW(t), обусловленную медленно меняющейся ошибкой акселерометра, начальной выставкой гироплатформы, нескомпенсированным дрейфом гигроскопов ИНС, а также шумовой составляющей ошибки акселерометров.
На второй вход В23 с выхода шестого И36 через МУ37 поступает напряжение, пропорциональное оценочному значению ошибки измерения скорости EW*(t), которое формируется в соответствии с априорной моделью 1 элементами: СВ38: пятым И34, тринадцатым УС33, шестым СУМ 35 и шестым И36. В результате будет скомпенсирована ошибка измерения скорости EW(t) и на выходе В23 будет действовать напряжение, пропорциональное истинному значению путевой скорости ЛА. Далее это напряжение через второй УС24 и третий УС27 подается соответственно на вход второго И25 и третьего И28, с выходов которых снимается напряжение, пропорциональное измеряемой дальности до РМ и фазе радиосигнала. При этом не требуется предварительного задания характера движения ЛА, а следовательно снимаются накладываемые им ограничения, которые определяют в прототипе необходимость расширения полосы пропускания измерителя, что приводит к ухудшению его точностных характеристик. В результате в предлагаемой системе обеспечивается более высокая по сравнению с прототипом точность измерения дальности, а также расширяется область ее применения. Напряжение с выхода второго И25 подается на ФИ26, выходной импульс которого поступает на ФСС32, где осуществляется формирование двух следящих импульсов, соответствующих ранним стробам. Напряжение с выхода третьего И28 подается на УЭ29, где оно используется для фазовой автоподстройки опорного сигнала, вырабатываемого в ПГ30. Это обеспечивает по сравнению с прототипом более точную фазовую подстройку опорного сигнала, используемого в синхронном и фазовом детекторах. Кроме того, напряжения с выходов второго И25, шестого И36, пятого И34, СВ38 и третьего И28, пропорциональные соответственно значениям D*(t), EW*(t), Ea*(t), Δ*(t) и Ф(t), подаются на третьи входы первого СУМ 5, второго СУМ 18, третьего СУМ 19, четвертого СУМ 20 и пятого СУМ 21 соответственно, где осуществляется коррекция названных величин на основе обработки очередного импульса от РМ.
Выходом комплексной системы измерения дальности является выход второго И25, откуда снимается напряжение, пропорциональное D*(t).
В комплексной системе измерения дальности для формирования оценки скорости используется слежение за ошибкой ее измерения МС22, а не за самой величиной W(t), как это имеет место в прототипе. В результате в предлагаемом техническом решении для получения D*(t) не требуется предварительного описания характера изменения скорости ЛА и как следствие снимаются накладываемые этим описанием ограничения. Последнее обстоятельство, а также осуществление квазикогерентной обработки и наличие перекрестных связей по ошибкам слежения за соответствующими параметрами между дальномерным каналом и каналом фазовой автоподстройки дало возможность в предлагаемой системе по сравнению с прототипом дополнительно сузить (без увеличения динамических ошибок) полосу пропускания радиотехнического измерителя, уменьшить флуктуационную составляющую ошибки измерения дальности и тем самым повысить точность и помехоустойчивость предлагаемой системы в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018869C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| Комплексный измеритель дальности | 1986 |
|
SU1396103A1 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| Бортовой двухкоординатный радиопеленгатор | 1987 |
|
SU1484105A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2041463C1 |
| Система измерения азимута летательного аппарата относительно радиомаяка | 1984 |
|
SU1181398A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПРОДОЛЬНОГО ДВИЖЕНИЯ САМОЛЕТА | 1991 |
|
RU2020110C1 |
| Комплексный доплеровский измеритель скорости подвижного объекта | 1985 |
|
SU1347721A1 |
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
Использование: в радиотехнике, в дальномерном канале радиотехнических систем ближней навигации. Сущность изобретения: комплексная система измерения дальности содержит синхронный детектор 1, временной различитель 2, тринадцать усилителей 3,24,27,9-17,33, шесть интеграторов 4,25,28,8,34,36, шесть сумматоров 5,18,19,20,21,35, фазовый детектор 6, схему совпадения 7, фазовращатель 31, перестраиваемый генератор 30, управляющий элемент 29, формирователь импульсов 26, формирователь следящих сбросов 32, измеритель 22, вычитатель 23, схему выборки с запоминанием 38, маштабируемый усилитель 37, генератор тактовых импульсов 39. 1 ил.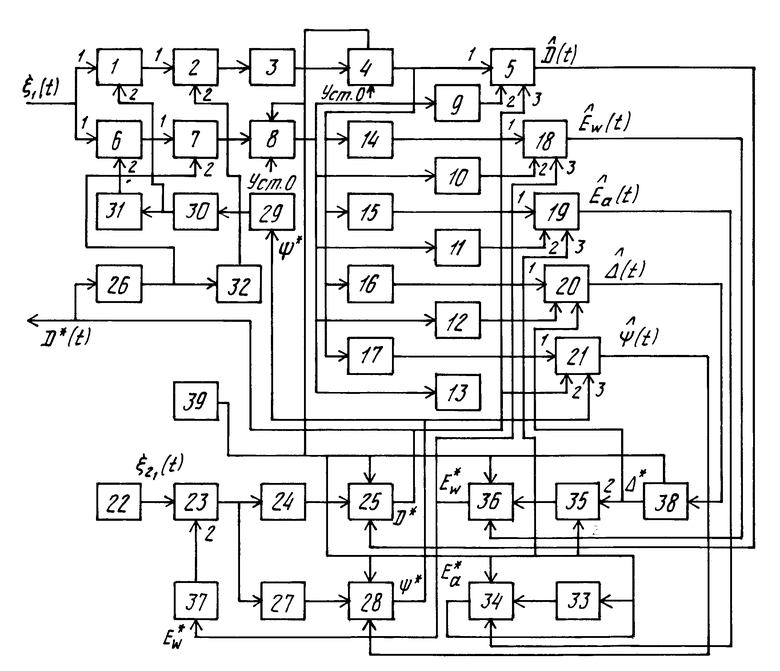
КОМПЛЕКСНАЯ СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ, содержащая последовательно соединенные синхронный детектор, временной различитель, первый усилитель, первый интегратор и первый сумматор, последовательно соединенное управляющий элемент и перестраиваемый генератор, выход которого соединен с вторым входом синхронного детектора, последовательно соединенные формирователь импульсов и формирователь следящих стробов, выход которого соединен с вторым входом временного различителя, последовательно соединенные измеритель скорости, вычитатель, второй усилитель и второй интегратор, последовательно соединенные третий усилитель и третий интегратор, вход третьего усилителя соединен с выходом вычитателя, масштабирующий усилитель, выход которого соединен с вторым входом вычитателя, отличающаяся тем, что в нее введены последовательно соединенные фазовый детектор, схема совпадения, второй вход которой соединен с выходом формирователя импульсов, четвертый интегратор и четвертый усилитель, выход которого соединен с вторым входом первого сумматора , фазовращатель, вход которого соединен с выходом перестраиваемого генератора, а выход - с вторым входом фазового детектора, пятый - восьмой усилители, входы которых объединены и соединены с выходом четвертого интегратора, девятый - двенадцатый усилители, входы которых объединены и соединены с выходом первого интегратора, второй - пятый сумматоры, первые входы которых соединены с выходами соответственно девятого - двенадцатого усилителей, вторые входы этих сумматоров соединены соответственно с выходами пятого - восьмого усилителей, последовательно соединенные тринадцатый усилитель, пятый интегратор, шестой сумматор и шестой интегратор, выход которого соединен с входом масштабирующего усилителя, схема выборки с запоминанием, выход которой соединен с вторым входом шестого сумматора, а вход - с выходом четвертого сумматора, генератор тактовых импульсов, выход которого соединен с управляющими входами первого - шестого интеграторов и схемы выборки с запоминанием, вход формирователя импульсов и третий вход первого сумматора объединены и соединены с выходом второго интегратора, вход управляющего элемента и третий вход пятого сумматора объединены и соединены с выходом третьего интегратора, вход тринадцатого усилителя и третий вход третьего сумматора объединены и соединены с выходом пятого интегратора, третьи входы второго и четвертого сумматоров соединены соответственно с выходами шестого интегратора и схемы выборки с запоминанием, выходы первого - третьего и пятого сумматоров соединены с входами установки начальных условий второго, шестого, пятого и третьего инверторов соответственно, первые входы синхронного и фазового детекторов объединены и являются входом комплексной системы измерения дальности, выходом которой является выход второго интегратора.
| Комплексный измеритель дальности с взаимной коррекцией | 1981 |
|
SU995625A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
