Изобретение относится к радиотехнике и может быть использовано в ра-. диотехнических системах ближней навигации (РСБН),устанавливаемых на борту летательных аппаратов.
Цель изобретения - повьшение точности измерения навигационных параметров.
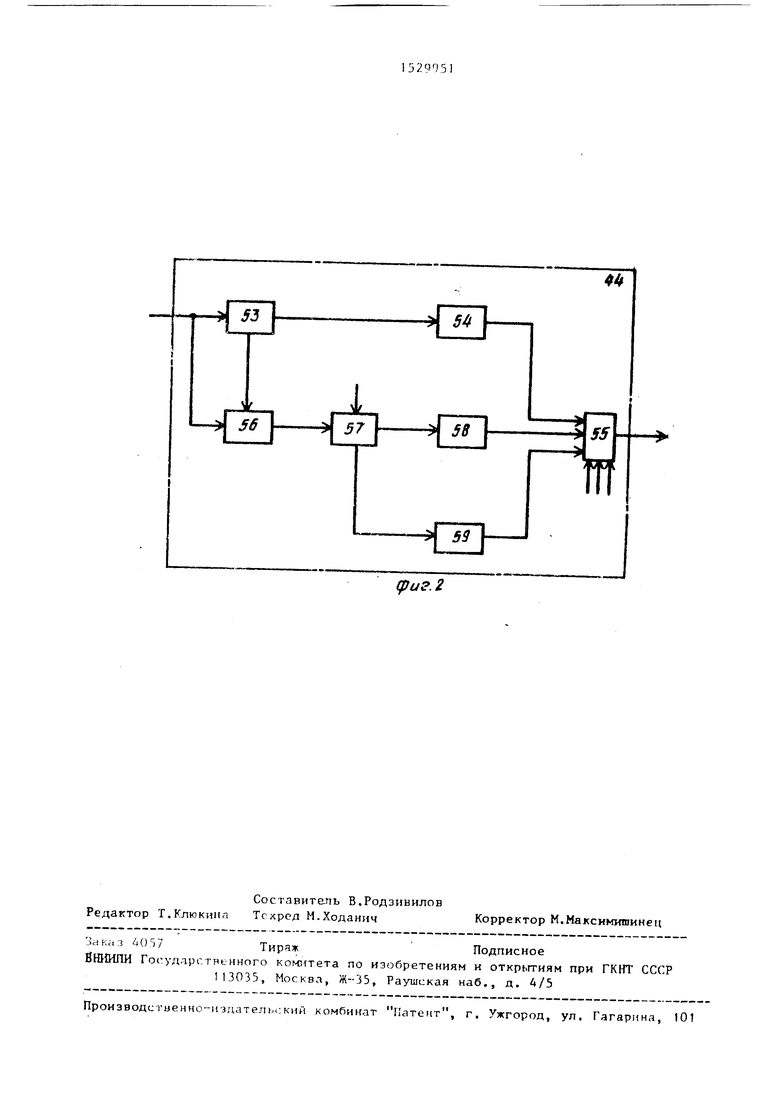
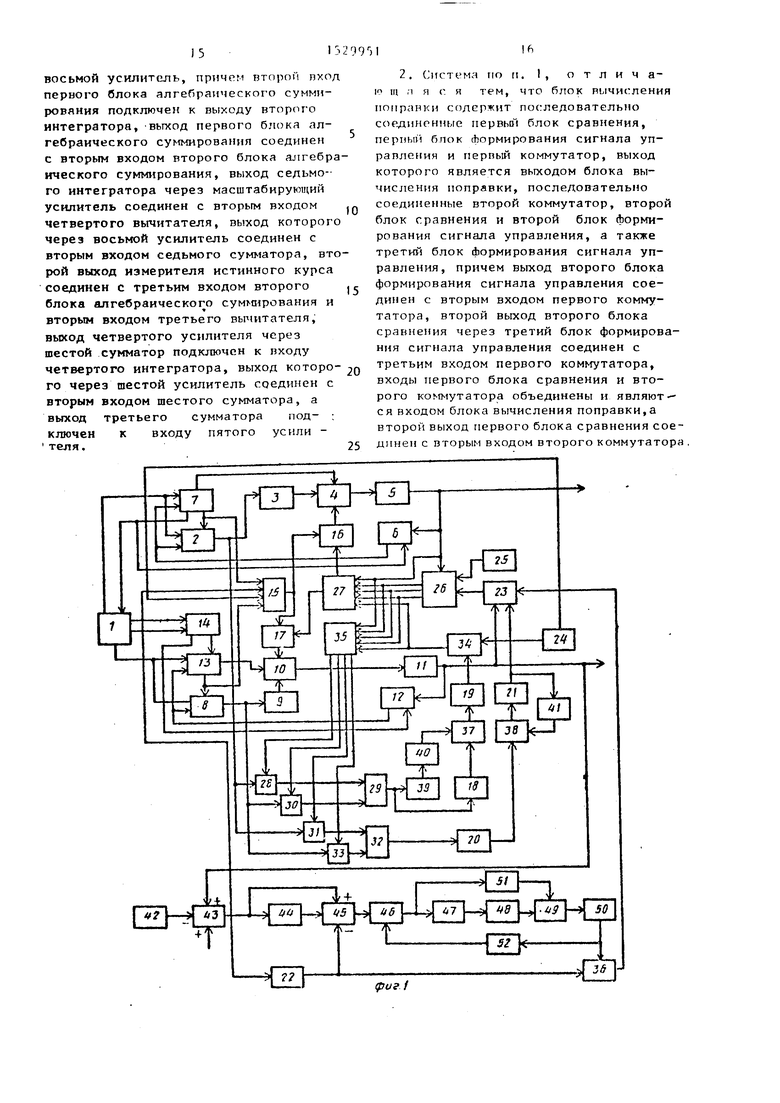
На фиг. 1 представлена структурная электрическая схема бортовой комплексной системы измерения дальности и азимута; на. фиг. 2 - блок вычисления поправки, пример выполнения.
Бортовая комплексная система измерения дальности и азимута содержит
блок 1 передачи и приема радиосигналов, дискриминатор 2 дальности, первый усилитель 3, первьЛ сумматор 4, первьй интегратор 5, формирюватель .6 дальномерного строба, обнаружитель .7 дальномерного сигнала, дискриминатор В азимута, второй усилитель 9, второй сумматор 10, второй интегратор 11, формирователь 12 aзи fyтaльнo- го строба, обнаружитель 13 азимутального сигнала, обнаружитель 14 опорных импульсов, элемент И 15, первый и второй коммутаторы 16 и 17, третий усилитель 18, третий интегратор 19, четвертый усилитель 20, четвертый
ел
N9
0 СП
iiiiTtM-p.n cii 21, И 1Г - iim iTib /- /: игтип- И(ЧТ кугп, riepuhu i щ.пщтлтелт. 23, ичмрритр Tfj 2 гкс)рси-1и, m MOiiHTp.Tib 25 иыггггы, блок 2f) T M4H -JifMii 4 трнг о- 1 пмгтрнчргких фуикггий, 27 rn.i- числеиия CKOpocTpii НЗМРНРИИЧ л-чльнос- ти и ячммутл, T efvniini Лок 28 уипожпиця, третий суммятор 29, тттстрой блок Ю ую1ожеи11Я, третий 31 ум- цпжепип, чотнертьп cvNtMaTop 32, чет- нертыЛ 33 y чtoжeни, второй вы- читятель 3, блок 35 р -;числг иин проек тнруютих функций, третий пычмт.атель 36, пятый сумтштор 37, тестой сумма- тор 38, пятьп усилитель 39, пятьп интогрятор 40, niprToif уги.митсми: (1, измерите.) 42 кург.пгюго VTJM, порньо блок A3 ялгсбрлическг гс суммиропя- иия, блок 44 вычисления гюпропки,
второй блок 45 ялгебряическо1 о суммирования, 4eTnepThrii пычитатсль 4 п ce/ibMiM усилитель 47, riiecToii иитрг--- ратор 48, седьмой суггматор 49, седьмой интегратор 30, иосьмой усилитель 51 и млсптлбир /юниш усилитель 52.
Блок 44 иычиглеиип попранкм содержит перпий блок 53 срлпнения, neppbrfi блок 54 (Ьормиро1 яния сигняпя упряи- лекия, 11еря.1Й коммутятор 55, второй кo fмyтaтop 56, пторой блок 57 сравнения, пторой блок 58 ijioptinpC Fiaiuifl снг- нала упрг влеиия и третий блок 59 diop- ьп1ропаиия сиг-нала упраипсния.
Бортояая комплексная система ичме- рения да1:ьности и азимута работает гледуюгпим образом. На .nMioN этапе ироичг.садител обиарчокение измерительных дгль 1омерног( и азимутального импульсог, а также опорних имт|ульсон 35 и Г-), Л1Т1М далг,1К) и азимутальная части си тег-п,1 работают независимо.
При поиске н обнлружс нии дгитьно- мерного сигнала формирователь 6 даль- номерного строба на каждой иьтульс Запрос вырабатынает далыгомерньп строб, временное положение центра которого относительно импульса Запрос сооткетствует оценке дальности р,
хранящейся в первом интеграторе 5 и снимаемой с его выхода.
Так как первоначальное значение оценки дальности произвольно, то формирователь вьфабатыпает далк.ноиернь строб,, в общем случае не с:1впадаюгаий с временным положением измерительног дальномерного импульса, посту1:; кчцсго на первый вход ixipa дяльимг гп. (Обнаружитель 7 дал1 номерного сиг I . анализирует совпадение изме- риюльн чп ;iaj)bHciN epnoro импульса и дал iiiir-jfiijioi i строб 1, при невыполнении логики обнаружения обнаружитель 7 пррсчю.пип- систему в режим Поиск f П1)ц зтом снимается режим Сопровожде- иие по р, в результате чего на уп- папл;но1цем выходе пбнар ткителя 7 даль- номерного сигнал гюявляется логичес- 1,;1Й нол;, К(-)Тор|,1Й пог:тупает на управ- ля К11:1,ий. вход дискриминатора 2 дал1)Нос- ти, блокируя его работу, а также на пеу) вход элемента И 15. В результате 3TOI-0 на выходе элемента И 15 также будет логический iujjib, который 1 ь-:ту1гает на управляющий первый вход 1 ;: ммутатора 6, размыкая его. В сле- дуп цом радиолот, -циопном такте в мо- ггент Т)ремени, которьй соответствует центру дальномерного строба, обняру- житг1п. 7 выдает с второго выхода сигнал Поиск f, которыГг через пер- П1.П сумматор 4 поступает нл вход пер- fu)i o интег ратора 5. момент появления на нергюм иходе обнару :и.теля 7 да.1Т1,номсрного сигнала измерительного /V UTT-MOMepHoro имнул7 -са сигнал Поиск с снимается и тогда в нepDo pi .Topc 5 запоминается значение даль- нгхп и, спптпетствукчцее примятому Л 1.(ом(рному сигналу. При правильной р.м истрации дальномериого импульса в последующих тактах выпол} яется логика ofiHapyyeH Hi и на управляющем вь:ходе |;Г Иаруя;ителя 7 появляется рсзопая команда Сс)пр 1 ождение по р в виде .г. огической единицы, которая поступает на уп;)аплякчиий вход дискриминатора 2, ),,1Я ei M работу. В режиме Со- и;юпож/;о 1ие по j/ на В1||ходе диг-кри- .фа 2 дальности вьцгабатьн агтся сигнал рассогласования, котортлй через ;i-rffi,4bri( усилитель 3 и nepflbc i cyrihiaTop 4 п(ступает на пход перного Hsneipa- TO . ii 5, на 15ьгходе которого в та 1Ч: /срг-дкении образуется oiteuRj ,нести .
;,.- жимр поиска и обнаружения ази- му Ь 1льнаг ;. сигнала работа ;Ч1ль- ного канала начинается с сн нару с- иия С .-рии опорных импульсов З:;. и
36
ггослс чего в MOMei{Tiji их ):1, 1дения обнару:китель 1ч опормих лмиуль- соц вггрлбатывает имлульс ссперл ;,, а T.iK.rt; р.гзовую команду Coniioiui .-.ч - ние N и ииде лощческо) , ко- гор,1я юстукает на -прав::и1 :;:и; :: ,;
обнаружителя 13 лтммутлл.ного сисна- ла, рачрешан егч) рлПоту, Формирователь 12 азимутальиог, строба на каж- дьвЧ импульс N, поступлюший на его второй вход с первого выхоДеТ обмяру- жителя 14 опорных импульсов, вырабатвает азимутальньпг строб, временное положение центра которого относительно импульса N соответствует оценке азимута в, хранящейся во втором интеграторе I1 и снимаемой с его выход Так как первоначальное значение оценки азимута произвольно, то формирователь 12 азимутального строба вырабатывает азиьтутальньй строб, в общем случае не совпадающю с временным положйшем измерительного азимутального импульса, поступающего на ази- мутальньсй вход системы обнаружителя 13 азимутального сигнала, анализируя совпадение измерительного азимутального сигнала и азимутального строба, при невыполнении логики обнаружения переводит систему в режим Поиск б. При этом снимается режим Сопровождение по б, в результате чего на управляющем выходе обнаружителя 13 азимутального сигнала появляется логический ноль, который поступает на управляющий вход второго коммутатора 17, размыкая его.
В следук1щем периоде работы в момент времени, соответствующий центру азимутального строба, обнаружитель 13 азимутального cm нала выдает с певого выхода сигнал Поиск б, который через второй сумматор 10 Поступает на вход второго интегратора II. В момент появления на перлом входе обнаружителя 13 измерительного азимутального импульса сигнал Поиск 0 снимается. В результате во втором интеграторе 11 запоминается значение азимута, соответствующее принятому азимутальному сигналу. При правильной регистрации азимутального сигнала и выполнении логики обнаружения на управляющем выхода обнаружителя 13 азимутального сигнала появляется команда Сопровождение по 6 в виде логической единицы, которая поступает на управляющий вход дискриминатора 8 азимута, разрешая его работу. В режиме Сопровои.-деиие по 0 на выходе дискриминатора 8, вырабатывается сигнал рассоглас.оианип, который через второй усилитель 9 и второй сумматор 10 поступает на вход рторого интегратора
0
5
0
5
0
5
0
5
0
5
I 1 , на п,1ходс кг)торого в результате . усреднения формируется оценка азимута fi.
В реж1иге комгитрксной обработки навигационной инЛюрмации кроне дальности р и азимута О в системе используются также воздушная скорость V, ис- тинньЛ курс V курсовой угол радиостанции г, поступающие с первых выходов соответственно измерителя 2А скорости, измерителя 22 истинного курса и измерителя 42 курсопого угла. Напряжение, пропорциональное значению курсового угла радиостанции f с выхода измерителя 42 подается на вход первого блока 43 алгебраического суммирования, на второй вход которого с выхода второго интегратора II подй- ется напряжение, пропорциональное измеренному значению азимута 0, а на его третий вход подается напряжение, пропорциональное V рад. В первом блоке 43 осуществляется формирование си1- нала, пропорционального вычисленному значению курса ly . При этом в vr отсутствует ошибка, обусловленная дрейфом азимутального гироскопа лу, которая характерна для курсовых систем.
Величина Vj может принимать значения от -If до З рад и, следовательно, может вьп1ти за пределы области допустимых значени) v (О у i Z) . Поэтому напряжение, прш орциональное VP , с вькода первого блока 43 алгебраического суммгфования подается на вход блока 44 вычисления поправки, который на основе сравнения входного напряжения с напряжениями, пропорциональными предельным допустимым значениям Ц (0,2) , выдает соответствук щий сиг)1ал поправки ( О; -2), устраня- Ю1Щ& неоднозначность отсчета tfj. Сигнал с выхода блока 44 подается на вход второго блока 45 алгебраического суммирования, на второй вход которого с выхода первого блока 43 алгебраического суммирования поступает напряжение, пропорциональное вычисленному значению курса v, а на третий вход -с выхода измерителя 22 истинного курса подается напряжение, пропорциональное измеренному значению курса у, содержащее указанную выше ошибку i(t/, Так как в вычисленном на основании информации от других измерителей значении у отсутствует ошибка, характерная для курсовых сиетем, это потяоляет ш. ле.пить -п но втором блокр алгебрличрского сум- мироиания, а яттем оценить и tкомпенсировать.
Оценка и последующая компенсация указанной ошибки осу1:1сствляк1гся с. по- мошью четпертого вычитателп , седьмого и восьмого усилителей 47, 51, шестого и седьмого интрграто1)оп 8 и 50, сельмою сукматорп А9, масштабирующего усилителя 52 и третьего вы- чктателя 36. Напряжение, пропорциональное оценке диачения курса (, с выхода третьего вычитателя поступает на первьп вход первого вычитателя 23 на второй и третий входы которого подаются напряжения, пропорциоиальные соответственно оценке а:эимута & с выхода второго интегратора 11 п корректирующей поправке курса с выхода четвертого интегратора 21. В результате, на выходе первого им- читателя 23 образуется напряжение, пропорциональное г иачению угла
д .,
(1)
Напряжение, пропорциональное воздушной скорости, с пыхода измерителя 24 скорости поступает на первьй вход второго вычитателя 34, на второй вход которого поступает напряжение, пропорциональное корректирующей поправки cfV с выхода третьего интегратора 19. В результате на выходе второго вычитателя 34 образуется напряжение, пропорциональное значению скорректиропанной скорости
(v
(2)
В блоке 26 вычисления тригонометрических функций формируются напряжения, необходимь е для определения скоростей и: мерения азиь-тута и дальности, проектирующих функций, а именно sin |j , cos м s cos f .
(3)
cos 6 Vl-(H/p) ,
угол места летательного аппарата относительно радиомаяка; со высота полета летательтюго аппарата, которая в рипе напряжения поступает с выхода измерителя 25 высоты на второй вход блока 26 вычисления трп-, гонометрических функций. определения cos /i по формуле третий вход блока 26 подается апряжену1е, пропорциональное
oitPHKi далТ Ности р . Вычисленные в блоке 26 значения функций sin f; , cos fj и COP ft с его первого, второго и 1рртьрг о выходов поступают соответственно на второй, третий и четвертыт входы блока 27 вычисления скоростей измснс:иия дальности и азимута. Кроме триг(нометрических функций в блок 27 irn тунают: на первый вход напряжение, проп1-)11ис1нальное оценке р дальности с выхода пеового интегратора 5, на пя1Ы11 лход напряжеиие, пропорциональное скорректированной воздушной скорости с выхода второго вычитателя 34. первом выходе блока 27 будет присутствовать напряжение, пропорциональное скорости изменения дальности
0
5
0
5
0
5
о
р (V-fA ) cos f.( cos ,
(4)
a НЛ втором выходе - напряжение, про- П(рциональт1ое скорости изменения азиi-fy т а:
)sin(U/ .(5)
Н режим комплексной обработки информации система нереходит только после того, как на соответствующих входах элемента И 15 появляется в виде логических единиц paaoBi.ie команды Со- нронс ждение по р , Готовность но V, Готовность ноу, Сопровождение по О. При этом на выходе элемента И 15 будет присутствовать логическая единица, которая, поступая на управ- ликллие входы первого и второго комг-гу- татсроо 16 и 17, замыкает их. Вычисленная скорость изменения дальности р -fcftci порвьп коммутатор 1Ь поступает :1,1 третю вход первого сумматора 4, а пы-п сленная скорость изменения ; T,jf-iyTT 6 через второй коммутатор 1 7 поступает на трети11 вход вгорого сумматора 10.
Таким образом, в режиме комплексной об;)а5отки следящие система дально- мррного и азиьгутального каналов имеют яс.татизм второго порядка с ингег- риронанием вычисленных скорос-тей из- ме 1С1-;ип соотпетстпующих параметров
Cj и е).
мри этом в устройстве регялиз пптся следутпщце уравнения:
р Ч, -сГУ)соз(д cosf +Kp.,Af ;
0
-Pf(V-cTV) ,
: -bK j:f pap4-f,,e.);
(6)
+ K,,Cf,c, .,,рДО); (Ccrvp f f v fl).
где Kpp ,Kep,K,K.,K,K - ко-,с14,ици- енты усилен; я первого, пто- рого, третьего, четвертого, пятого шестого усилителя 3, 9, 18, 20, 39, 41 соответственно;
/vo f V f просктнру;г.щис функ- ui-;4, Ийачеимя -оторьгх рассчитываются в блоке 35 вычисления прое тирующих функций
VVf
в соответствии с выражениями
-гокр/Т cosp;
-f cos ft /T;(7)
f j- - s i up / Т (V- fV ) с о 5 f i ;
W -f cos, i соя/. /T(V-JV).
Вычислённь е в блоке 35 значения функцш1 f;,,, ij,Q, ,, с его tiep вого, второго, третьего и четвертого выходов поступают соответственно на вторые входы первого, }зторого, третьего и четвертого блоков 28, 30, 3 и 33 умножения. На bepBbje входы первого блока 28 умноже иип и третьего блока 31 умножения поступает ненязка йр от дискриминатора 2, а на первые входы второго блока 30 умножения и четвертого блока 33 -у.ножении посту- Пйет невязка лв от дискриминатора 8 Напряжения, пропорп юнальные проекциям невязок ДР и а6 на параметр Jv, с выходов первого блска / 8 умзюженип и второго блока 30 умножения поступают соответственно на первый и второй
входы третьего сумматора 29, а на-
пряжения, пропорциональные проекциям невячок 5р и йб на параметр tiV, с выходов третьего блока 31 умножения и четвертого блока 33 умножения поступают соотюитственпо на перг.ьй и второй входы четиертого сумматора 32. Далее сумма проекций в виде напряжения с выхода третьего суь1мато- ра 29 поступает одновременно на ихо- ды третьего усилителя 18 и пятого усилителя 39, с выхода которого после усреднения п пятом интеграторе 40 напряжение, т;;х1порциональное корректирующей поправке tfa по ускорению, подается на перпьпЧ вход пя- сумматорй 37, а на его второй вход - напряжение с выхода третьего усилителя 18. Сумма ттих напряжений, пол чаемая на сыход - t ;iToro сумм.чгор. 3/, рпслс усреднение в тргтт-гм
интеграторе
сотялет на eid msy.o5О
5
0
5 ,.
„
и
де поправку по скорости tfV . Напряжение, пропорциональное сумме проекций невязок лр и йС на параметр /у « с рмхода четвертого сумматора 32 после усиления в четвертом усилителе 20 подается на первьвТ вход шестого . сумматора 38, на второй вход которого подается сигнал обратной связи с выхода четвертого интегратора 21. Сигнал ча выходе шестого сумматора 38 после усреднения в четвертом интеграторе 21 представляет собой корректирующую поправку истинного курса V.
Система в целом будет функционировать так, чтобы при определений оценок р , Q, cfV, сГу , она находилась в устойчивом состоянии, т.е. чтобы невязк Лс и дб стремились к нулю.
Режим автономного счисления координат возможен лигаь после получения устойчипых значений оценок дальности р, азигтута корректируюодах поправок по скорости uV , курсу (, ускорению сГа. Режим автономного счисления возможен в трех вариантах:
при потере радиоконтакта с радиомаяком в канале дальности;
при потере радиоконтакта с радиомаяком в канале азимута;
при полной потере контакта с радиомаяком.
При пропадании радиоданкых в канале дальности, обусловленном отсутствием измерительного сигнала на даль- номерном входе системы, при наличии дальномерного строба, вырабатываемого формирователем 6, обнаружитель 7 дальномерного сигнала в течение некоторого времени Т продолжает сохранять управляющие сигналы, соответствующие режиму комплексной обработки, а на выходе дискриминатора 2 дальности будет присутствовать невязка . Вследствие этого на выходе первого интегратора 5 будет получена оценка р, определяемая выражением вида
f (V-(fV -)co8p cos ft .
(8)
В то же время канал азимута продолжает находиться в режиме комплексной обработки. При этом поправки i/V и у в соответствии с выраженнем (6)
корректируются по Н(пп-1ке дв . По истечении времени Т- снимается разовая команда Сопронождение по р, и на втором ныходе обнаружителя 7 дально- мерного сигнала появляется сигнал Поиск р, кроме того, на выходе элемента И 15 появляется логический ноль, в результате чего первый и второй ком гутаторы 16 и 17 размыкаются и канал дальности переходит в режим Поиск, а канал азимута - в режим чисто радиотехнический.
При пропадании радиоданных в канале лзимута, обуслопленном отсутствием либо опорных импульсов 35, 36, либо измерительного сигнала на азимутальном входе системы при наличии азимутального строба, вырабатываемого формирователем 12 азимутального строба, обнаружитель l3 азиму- |тального сигнала в течение некоторого времени TQ продолжает сохранять управляющие сигналы, соответствующие режиму комплексной обработки. При этом на выходе дискриминатора 8 будет присутствовать невязка . Вследствие этого на выходе второго интегратора I1 будет получена оценка 0, определяемая выражением вида
(V-)sin p/p cos/j .
(9)
В то же время канал дальности продолжает находиться в режиме комплексной обработки. При этом поправки d V и cfiy корректируются только по невязке Д/.
По истечении времени TQ снимается разовая команда Сопровождение по 9 и на первом выходе обнаружителя 13 азимутального сигнала появляется сигнал Поиск б, кроме того, на выходе элемента И 15 появляется логический ноль, в результате чего первый и второй ком гутаторы 16 и 17 размыкшотся и канал азимута переходит в режим поиска, а канал дальности - в режим чисто радиотехнический.
В случае полной потери радиоконтакта с радиомаяком система в тече- кие времени То будет находиться в режиме автономного счисления дальнойти и в течение Т - азимута (см. выражение (6)), после чего она переходит в режим поиск по у и б .
Блок А вычисления поправки рлбо- тает следующим образом. Напряжение, пропорциональное У|, поступает на вход первого блока 53 сравпслшп, па
5
0
5
0
5
0
5
0
5
второй вход которого подается напряжение, пропорциональное 27 рад.В случае, если входное напряжение больше заданного (), сигнал с выхода первого блока 53 сравнения поступает на вход первого блока 54 формирования сигнала управления, формируется напряжение, которое подключает к выходу первого коммутатора напряжение, пропорциональное . Если входное напряжение меньше , с второго выхода первого блока 53 сравнения поступает сигнал, который подается на второй вход второго коммутатора 56, В результате напряжение ,пропорциональное g/g , поступает на вход второго блока 57 сравнения. Если входные напряжение меньше напряжения, пропорционального нулю радиан, то с выхода второго блока 57 сравнения поступает сигнал на вход второго блока 58 формирования сигнала управления, формирующего сигнал управления, который подключает к выходу первого кoм ryтa7 тора сигнал, пропорциональный . В случае, если входное напряжение больше или равно напряжению, пропор- 1Шональному нулю радиан, с второго выхода второго блока 37 сравнения подается сигнал на вход третьего блока 59 формирования .сигнала управления, который подключает на выход первого коммутатора 55 сигнал, пропор- циональньм нулю радиан-.
Формула изобретения
I. Бортовая комплексная система измерения дальности и азиьтута, содержащая последовательно соединенные блок передачи и приема радиосигналов, дискриминатор дальности, первый усилитель, первый сумматор, первый интегратор и формирователь дальиомерно- го строба, обнаружитель дальномерного сигнала, первый вход которого подкгпо- чеи к первому выходу блока пере|;ачи и приема радиосигналов, первый выход обнаружителя дальномерного сигнала соединен с входом блока передачи и приема радиосигналов и вторым входом форьгирователя дальномериого строба, въкод которого соединен с втпрыьгя яхо- дами дискриминатора дальности и обнаружителя дальномериого сигн.-ип, пто- рой и третий выходы которого спс /тпне- ны соответственно с вторг.к.: r;v, 1Г(р- вого сумматора и третьим уп- ::: И ц- иг;
входом /UK Ki iU HM iT(i;ia дачьиск-ти, rio- олрдоиатг льнп : (,иис пь f- дискриMjnia тог лчимутл, г1ер(мГ1 вход кпто1)ого пг:дключси к гггорому пых(ду блпкл пере- дачи п iipTiena ра/тиосиг-иялов, гторпй усилитель, второй ryMf-iarop, оторой интегратор, формиропатпль азимутального строба и обиару :нтел1 азимутального сигнала, пторой иход которого соединен г ьторым выхо/юм бл(ка перс- дачи и npiiCMa р.- иосигналов, а первьй
ЙЫХОД СОСДИИКЯ с: ИТОРЫН НХОДС М DTOpO141 сумматора, обнаружитель опорных иМПульсор, иеррьй и второй входы ко- торого соединены соотнетстненно с третьим и четверт,1м выходами блока передачи и приема ради сигналов, я первый вы:-сод соединен с рторым входом формиронателя a:niNr/Tajn Horo строба, лыход которого с:оединен с вторым нхо- дом дискриминатора азимута, второй выход обнар ткителя aзи гyтaльнoгo сигнала соединен с третьим входом дис- ( фa ачигп та, а трети11 вход обнаружителя азнм тал1 ного сигнала соединен с вторь м выходом обнаружителя онорН1 1х и лlyльcoв, iicpbi,ni и второй коммут ToiM,i, Г лемг.нт 11, выход которого сос,иигн с: уирапяя чцими нхо да-1И нсрвого и второго коммутаторов, вькод первого кпм тугатора соединен с третьим входом rHjjiBoro сумматора, пЫход ffi cjporo К оммутатора со1 динен с третьим ьходогг рторого сумматора,
измеритель истинного курса, последовательно соедпненньи; пьпита- , в юрой вход которого соединен с в1 тходом нтс пого инто ратора и блок вьри1сления тригонометрических функ- ций, блок вьпшсления скоростей нения /дальности л , измеритель вмсоты, блок вь Ч11гления проектируемых функний, послсдователтл С согдиненные измеритель скорости Г; ) пг.тчита- тель, иервьо .второи, трс тий и четвер- Tbrfi блоки умножения, третий и четвер- Tbiii cyt-iMaTopi-i, TppTifi; и четвертый уоиштели, третий и четпертьп интегратор), npiitjeM HCjipiiii, нторой, третий. г;етверт п ( и пят|.1Й пходы блока вычисления ско1)остей И .игния дальности и азимута и блок; г:|1числения тригоно- метрическ1гх о07)С/,ииснь1 и соединены соотпстст ото с ь;ходом ттер- Boi O интегратора, с nopin.iM, пторым и гр - ТЫ1м вьг: ода;-1;: Гло.-;; 1:г-.1 и;сления
т р 1; го н о м с т р ич с г. 1 I; -.-;
.iii:i iin и выходом
вт орого ;.i, I ,;; о:; ;, г. /чр; и третий
HX( :i б Гока млчисленип три пноиртр - чсских чч ний соединены с Рычодами ni.icoTM и первого интегра- тор- 1 соотпетст11е)П1о, riepnt.ie пходь пр ВО1Ч) и третьего блоков умножения объ едииены и соединены с выходом дискриминатора дальности, первые входы второго и третьего блоков y п oжeнип объединены и соединер1ы с выходом дискри юшатора ,., нервьп, второй, третий и четвертый выходы блока дения ппоектирующих фу1ГК1;иГ1 сосдине- Н1,1 с вторыми входами первого, второго, третьего и четвертого блоков ум- ножения, первый и второй выходы блока вычисления скоростей изменения дальности и азимута соединены соответственно с вторыми входами первого и второго кoм гyтaтopoв, выходы первого и второго блоков умножения соединены с первым и вторым входами третьего сумматора соотвс тственно, выходы третьего и четвертого блоков умножения соед|Л1ены с первым н вторым входами четвертого сумматора, выходы третьего и четвертого сумматора соединены соответственно с входами третьего и четвертого усилителей, первьп, второй, третий и четвертьп входы элемента И соединены соответственно с тре- 1и,1ходом обнаружения дальномер- ного сигнала, с первым В1.1ходом измерителя исти)1ного курса, с вторым выходом измерителя скорости и вторым выходом обнаружителя азимутальнот О сиг- )ian;i, выход третьего интеграгора под- к.чючен к второму входу второго вычи- тлтеля, а выход четвертого интегратора соединен с третьим входом первого 1)1,|читателя, отличающаяся тем, что, с целью повьппения точности измерения навигационных .napaMeTpoB, в него введены последовательно соеди- нг пные пятый усилитель, пятьт интегратор и пятый сумматор, выход которого соединен с входом третьего интегратора, а второй вход - с выходом третьего усилителя, шестой сумматор,тестой усилитель, последовательно соединенные измеритель курсового угла, первьп блок алгебраического суммирования, блок вычисления поправки, второй блок алгебраического суммирования, четвертый вычитатель, седьмой усилитель, шестой интегратор, седьмой сумматор, седьмой интегратор и i i eTufl вычитатель, выход которого соединен с третьим йходом первого нычитлтсля,
восьмой усилитель, причем второй пход перного блока алгебраического суммирования подключен к выходу второго интегратора, выход первого блока алгебраического суммирования соединен с вторым входом второго блока алгебраического суммирования, выход седьмого интегратора через масштабирующий усилитель соединен с вторым входом четвертого вычитателя, выход которого через восьмой усилитель соединен с вторым входом седьмого сумматора, второй выход измерителя истинного курса соединен с третьим входом второго блока алгебраического сумгшрования и вторым входом третьего вьрштатбшя, выход четвертого усилителя через шестой сумматор подключен к входу четвертого интегратора, выход которо- го через шестой усилитель соединен с вторым входом шестого сумматора, а выход третьего сумматора под- ; ключей к входу пятого усили - теля.
2. Система по и. 1, о т л и ч а- 10 in ,-1 я с я тем, что блок в 1ЧИ1:ления поправки содержит последовательно соединенные первый блок сравнения, периый блок формирования сигнала управления и первый коммутатор, выход которого является выходом блока вычисления поправки, последовательно соединенные второй коммутатор, второй блок сравнения и второй блок формирования сигнала управления, а также третий блок формирования сигналя управления, причем выход второго блока формирования сигнала управления соединен с вторым входом первого коммутатора, второй выход второго блока сравнения через третий блок формирования сигнала управления соединен с третьим входом первого коммутатора, входы первого блока сравнения и второго коммутатора объединены и являют-- ся входом блока вычисления поправки,а второй выход первого блока сравнения соединен с вторым входом второго коммутатор
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| Комплексный измеритель азимута и дальности | 1985 |
|
SU1412473A1 |
| Комплексный измеритель азимута и дальности | 1985 |
|
SU1412471A1 |
| БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018869C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЙСКОВОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2102772C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ | 1992 |
|
RU2018861C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2019 |
|
RU2714672C1 |
| Комплексный измеритель азимута и дальности | 1985 |
|
SU1412472A1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
Изобретение относится к радиотехнике и м.б. использовано в радиотехнических системах ближней навигации, устанавливаемых на борту летательных аппаратов. Цель изобретения - повышение точности измерения навигационных параметров. Для достижения цели в систему введены два вычитателя, сумматоры, усилители, интеграторы, измеритель курсового угла, два блока алгебраического суммирования и блок вычисления поправки. На начальном этапе производится обнаружение измерительных дальномерного и азимутального импульсов, а также опорных импульсов 35 и 36, при этом дальномерная и азимутальная части системы работают независимо. Режим автономного счисления координат возможен лишь после получения устойчивых значений оценок дальности, азимута и корректир то|цих поправок по скорости, курсу ускорению. Режим автономного счисления возможен в трех вариантах: при потере радиоконтакта с радиомаяком в канале дальности; при потере радиоконтакта с радиомаяком в канале азимута; при полной потере контакта с радиомаяком. I з.п. ф-лы, 2 ил. (Л
-KZl 9
6 (риг f
| Ярлыков М.С | |||
| Статическай теория радионавигации | |||
| М.: Радио и связь, 1985 | |||
| Авторское свидетельство СССР 1422862, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
