Вы ход
teesA
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018869C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КУРСА | 2023 |
|
RU2809659C1 |
Изобретение м.б. использовано в пилотажно-навигационных системах самолетов. Цель изобретения повышение точности определения курса подвижного объекта. Система содер- жит наземный радиомаяк (НРМ) 1 и бортовой- измеритель курса (ИК) 3, состоящий из инерциального ИК 4, радиотехнического измерителя (РИ) 5 дальности и направления на НРМ1. Введены НРМ 2, а в ИК 3 - РИ 6 направления на НРМ 2, вычислитель 7 курса, сумматоры 8 и. 9 и следящий фильтр 10 с астатизмом 2-го порядка. ИК 4 определяет истинный курс V подвижного объекта с ошибкой, обусловленной дрейфом гироскопов, РИ 6 определяет курсовой угол |3 . РИ 5 определяет координаты Си б . На выходе сумматора 8 формируется сигнал, пропорциональный медленным уходам гироскопов ИК 4. Данный сигнал после фильтрации фильтром 10 используется в сумматоре 9 для компенсации ошибки, обусловленной уходом гироскопов, в измеренном значении курсового угла w . 1 табл., 2 ил. 1 to с «iRsa
qOi/e.;
Изобретение относится к радиотех нике и может быть использовано в пИ лотажно навигационных системах само летов, , .
Цель изобретения - повышение точ-- ности определения курса подвижного объектй.
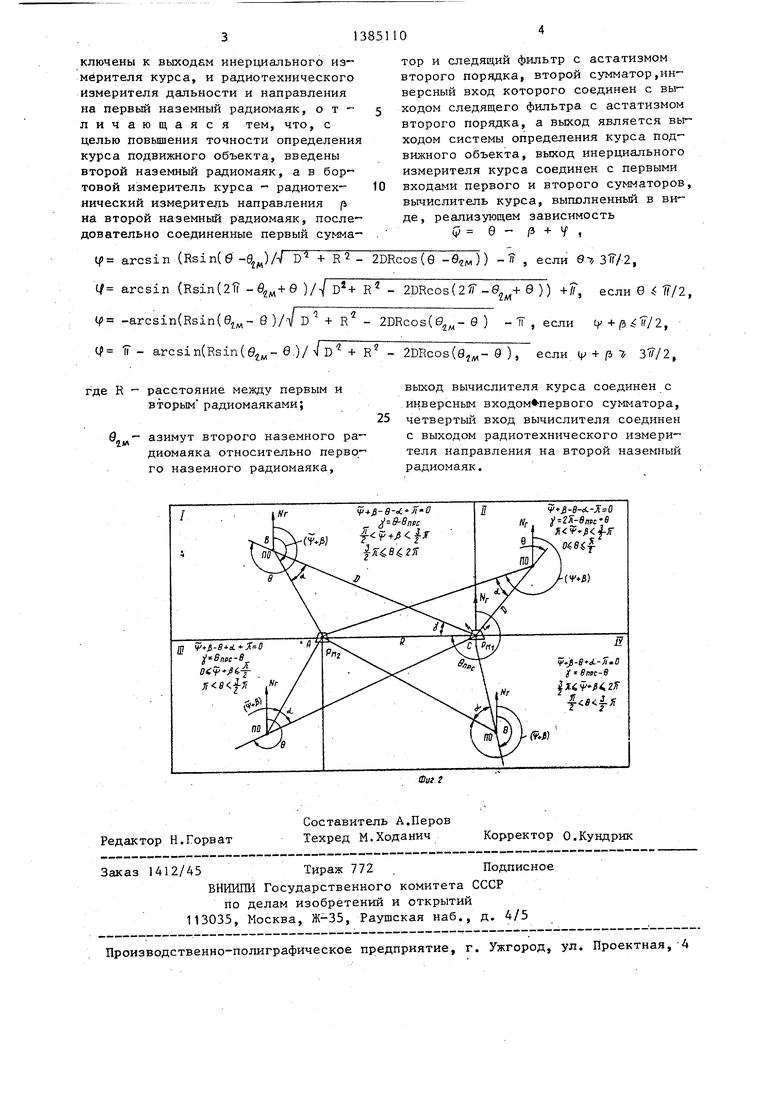
На фиг. 1 приведена структурная схема системы определения курса под- вижного объекта; на фиг. 2 - схема взаимного положения радиомаяков и подвилсного объекта.
Система определения курса подвиж ного объекта содержит первый назем- ный радиомаяк I, второй наземный радиомаяк 2 и бортовой измеритель курса 3, состоящий из инерциального измерителя курса 4, радиотехнического измерителя 5 дальности и направления на первый наземный радиомаяк, радиотехнического измерителя направления на второй наземный радиомаяк 6, вычислителя курса 7, первого 8 и второ го 9 сумматоров и следящего фильтра 10 с астатизмом второго порядка.
Система определения курса подвижг ного объекта работает следующим образ ом „
Инерциальный измеритель курса 4 определяет истинный курс ц подвижного объекта с ошибкой, обусловленной дрейфом гироскопов. Радиотехнический измеритель направления 6 на второй наземный радиомаяк 2 рпреде- ляет курсовой угол /i« Радиотехнический измеритель 5 дальности и направления на первый наземный радиомаяк 1 определяет соответствующие координа- ты D и б ,.
Между углами s существует взаимосвязь, которая описывается соотношением
f + fi - е + (/ ± 1Г О,
х де с - угол между направлениями подвижной объект - первый наземный радиомаяк и подвюкной объект - второй наземный радиомаяк. Возможные взаимные положения первого, второго наземных радиомаяков и подвижного объекта приведены на фиг,.2, где R - расстояние между перв.ым и вторым наземными радиомаяками, ,9 - азимут второго наземного радиомаяка относительно первого наземного радио- маяка,
В зависимости от того, в какой зоне находится подвижной объект,определяются знаки в известном уравнении. .
В таблице приведены условия выбора зоны и используемые при этом расчетные соотноиения.
I ЗТ/2. О ц)+fb-Q -0/ + Q
f
в - Sjx/,
II е.7Г/2
+ 1Ъ -e-cJ -7г о Г .0
III4 + Ь i f/2 (+;3 -б +d +ff 0
r 92л,-0
IV 3i /2 V+ft y + - e+o/- 0
f 2/M
Угол d в известном соотношении определяется выражением
с/ arcsin(Rsinj,/ D +R -2DRcos).
Вычислитель курса 7 определяет рабочую зону и вычисляет значение курса (р в соответствии с таблицей.
Вычисленное значение курса ip вьг- читается в первом сумматоре 8 из значения курсового угла V, измеренного инерциальным измерителем курса 4. Таким образом на выходе первого сумматора 8 формируется сигнал, пропорциональный медленным уходам гироскопов инерциального измерителя курса 4. Данный сигнал после фильтрации следящим фильтром 10 с астатизмом второго порядка используется в сумматоре 9 для компенсации ошибки, обусловленной уходом гироскопов инерцисшьного измерителя курса, в измеренном значении курсового угла ц.
Формула изобретения
Система определения курса подвижного объекта, содержащая первый наземный радиомаяк и бортовой измеритель курса, состоящий из инерциаль- ного измерителя курса у,, радиотех нического измерителя дальности D и направления б на первый наземный радиомаяк и вычислитель курса k , соответствующие входы которого под-
ключены к выходам инерциального из мёрителя курса, и радиотехнического Измерителя дальности и направления на первый наземный радиомаяк, отличающаяся тем, что, с целью повьппения точности определения курса подвижного объекта, введены второй наземный радиомаяк, а в бор- товой измеритель курса - радиотехнический измеритель направления (ь на второй наземный радиомаяк, последовательно соединенные первый сумма(f arcsin (Rsin(6 )/-i D + R (/ arcsin (RsinCzTi )/-/ R i arcsin(Rsin( Q )/V D + R (f - arcsin(Rsin(02M-6-)/ D + R - 2DRcos( 9 ), если if + fi 7/ ,
где R - расстояние между первым и вторым радиомаяками;
азимут второго наземного радиомаяка относительно первого наземного радиомаяка.
тор и следящий фильтр с астатизмом второго порядка, второй сумматор,инверсный вход которого соединен с выходом следящего фильтра с астатизмом второго порядка, а выход является выходом системы определения курса подвижного объекта, выход инердиального измерителя курса соединен с первыми входами первого и второго сумматоров, вычислитель курса, вышэлненньй в виде , реализующем зависимость
V е - /3 + У ,
2DRcos(0 )) - j если ,
- 2DRcos( )) +, если 6 ТГ/2,
2DRcos(e2«- Q ) - Г,если iy+p,/2,
выход вычислителя курса соединен с .инверсным входом первого сумматора, четвертьш вход вычислителя соединен с выходом радиотехнического измерителя направления на второй наземный радиомаяк.
i + -fl-flt. 2Z-8mc S
| Авиационные приборы и измери тельные системы/ Под ред | |||
| В.Г.Воробьева, М.: Транспорт, 1981,с,303, рис.18.21 | |||
| Ярлыков М.С | |||
| Статистическая теория радионавигации | |||
| М.: Радио и связь, 1985, с.323, рис | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
