Изобретение относится к авиационной технике, а именно - к бортовым системам радиолокации, радиоуправления и радиопротиводействия, и может быть использовано для определения технического уровня указанных систем - новых и (или) модернизируемых - по результатам специально организованных испытательных полетов. Технический уровень названных радиоэлектронных систем (РЭС) оценивается показателями эффективности их функционирования (промахом, вероятностью поражения (непоражения) объекта, точностными характеристиками РЭС в беспомеховой и помеховой радиоэлектронной обстановке и т. д.) на основе полученных данных о функционировании испытательных средств и объекта испытаний, а также о сопутствующих и измеряемых условиях проведения испытаний. Известно, что все виды испытаний бортовых радиоэлектронных систем условно, в соответствии со сложившейся практикой можно разделить на три основных категории:
натурные испытания, в том числе с использованием телеметрической аппаратуры;
полунатурное моделирование, при котором в испытаниях участвуют реальные испытываемые РЭС, а недостающие кинематические и динамические характеристики летательных аппаратов (ЛА) определяются с помощью цифровых или аналоговых моделей;
математическое моделирование, когда процесс испытаний реализуется в виде программы, состоящей из набора математических формул (уравнений) и логических операций.
Натурные испытания позволяют получить достоверную информацию об испытываемых объектах, но связаны с выполнением большого количества испытательных полетов и пуском телеметрических ракет, т. е. требуют значительных материальных и финансовых затрат, а в некоторых случаях, например, при невозможности разместить на мишени испытываемых систем радиопротиводействия, становятся нереализуемыми.
Полунатурное моделирование, сокращая общий объем испытаний, требует согласования выходных сигналов РЭС с моделируемыми условиями полета ЛА.
Математическое моделирование также сокращает и ускоряет процесс испытаний объектов. Однако оно возможно лишь в том случае, когда имеется возможность получить адекватное математическое описание моделируемого объекта.
В качестве аналогов заявляемого изобретения можно указать на способ проведения многофакторного эксперимента, изложенный в книге B. C. Жигилея "Основы теории планирования многофакторных испытаний", Л., ВИКИ им. А.Ф. Можайского, 1982, стр. 14-25, 34-43, 53. "Устройство для проведения многофакторного эксперимента" (авт. св. СССР N 729554, кл. G 05 B 23/00, 1978; авт. св. СССР N 1004980, кл. G 05 В 23/00, 1981; авт. св. СССР N 1691820, кл. G 05 В 23/02, 1989), "Система управления нестационарным объектом с восстановлением вектора состояния" (патент РФ N 2003165, кл. 5 G 04 В 23/00, 1990). Все перечисленные источники относятся к разновидностям математического моделирования испытаний с указанными выше достоинствами и недостатками.
В качестве аналога из области натурных испытаний РЭС отметим патент США N 5323309 кл. G 05 В 19/42, 1994 "Алгоритм оптимизации выборки данных в дискретных периодических системах с ограниченной частотой измерения периодов", где предложена система переключения частоты выборки для устройств отслеживания положения. Наиболее близким техническим решением к заявляемому изобретению является способ проведения натурно-модельного эксперимента, включающий:
натурные испытания РЭС, при которых испытываемую радиоэлектронную систему, контрольно-измерительную и записывающую аппаратуру устанавливают на самолете - летающей лаборатории (ЛЛ) (далее - 1-ом ЛА; средства воздействия на испытываемую РЭС и взаимодействия с ней устанавливают на другом летательном аппарате (далее 2-ом ЛА); производят полет летательных аппаратов по заданным маршрутам на заданных высотах с заданными скоростями и ускорениями (перегрузками); в течение реального времени работы испытываемой РЭС излучают радиосигналы этой РЭС и радиосигналы, воздействующие на нее; принимают радиосигналы, отраженные от 2-го ЛА, и радиосигналы, воздействующие на испытываемую РЭС; регистрируют сигналы, применяемые РЭС, и сигналы датчиков параметров летательных аппаратов;
обработку всех измеренных сигналов, на основе которой определяют фазовые координаты системы в составе 1-го и 2-го ЛА; используют фазовые координаты в качестве входных данных при имитационном моделировании, в результате которого получают сигналы, пропорциональные величинам показателей эффективности функционирования испытываемой РЭС. Известный способ представляет собой спланированный и скоординированный в методическом, техническом и организационном отношениях процесс, объединяющий результаты натурных испытаний и моделирования в реальном масштабе времени. (Натурный эксперимент. Информационное обеспечение экспериментальных исследований / Н.И. Баклашов, А.Н. Белюнов, Г.М. Солодихин и др.; Под ред. Н.И. Баклашова. - М.: "Радио и связь", 1982, стр. 21- 30).
Недостаток прототипа заключается, во-первых, в невозможности определения показателей эффективности испытываемых РЭС при отсутствии непрерывных реализаций выходных сигналов этих РЭС и, во-вторых, в сложности и высокой стоимости проведения полного объема натурных испытаний некоторых РЭС, для чего требуется 5 и более испытательных полетов.
Технический результат, достигаемый при осуществлении заявленного изобретения, заключается в уменьшении объема и сроков проведения натурных, в особенности - полигонных, испытаний, а следовательно, в ускорении проведения полного объема испытаний как важнейшего этапа жизненного цикла новой и (или) модернизируемой РЭС.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе проведения натурно-модельного эксперимента, включающем натурные испытания РЭС, при которых испытываемую радиоэлектронную систему, контрольно-измерительную и записывающую аппаратуру устанавливают на 1-ом ЛА; средства воздействия на испытываемую РЭС и взаимодействия с ней устанавливают на 2-ом ЛА; в течение реального времени работы испытываемой РЭС излучают радиосигналы этой РЭС и радиосигналы, воздействующие на нее, регистрируют сигналы, принимаемые испытываемой РЭС и сигналы датчиков параметров 1-го и 2-го ЛА, производят обработку всех принятых сигналов, на основе которой определяют фазовые координаты системы в составе 1-го и 2-го ЛА, которые используют в качестве входных данных при имитационном моделировании, в результате которого получают сигналы, пропорциональные величинам показателей эффективности функционирования испытываемой РЭС; предварительно определяют область физического пространства, в пределах которой могут быть реализованы траектории полета 1-го ЛА; осуществляют периодические сближения 1-го ЛА со 2-ым ЛА, маневрируя по направлению в пределах заранее определенного диапазона угловых скоростей линии визирования 2-го ЛА; выполняют траекторные измерения параметров 1-го и 2-го ЛА; принимают и регистрируют выходные сигналы испытываемой РЭС только в течение отрезков времени, когда фазовые координаты 1-го ЛА совпадают с аналогичными координатами реального носителя РЭС; по результатам совместной обработки информации, полученной в процессе сближений ЛА, формируют базу данных, которая управляет имитационной моделью. Укажем на причинно-следственные связи между отличительными признаками изобретения и техническим результатом. Сокращение времени испытаний является следствием, во-первых, использования отдельных выборок из результатов измерений выходных сигналов РЭС ( например, радиолокационных головок самонаведения) с разомкнутым контуром управления носителя РЭС при замкнутой цепи следящего измерителя и, во-вторых, формирования базы данных для моделирования признаков фазовых координат испытываемого объекта. Это позволяет существенно снизить затраты на натурные испытания РЭС, за счет сокращения в 5 и более раз числа испытательных полетов 1-го ЛА, и снимает требования иметь замкнутый контур управления по сигналам испытываемой РЭС.
Проведенный анализ уровня техники позволил установить, что заявителем не обнаружен аналог с признаками, идентичными всем существенным признакам заявляемого изобретения. Выбор прототипа из найденных аналогов позволил определить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков, включенных в формулу изобретения. Это дает основание полагать, что заявленное изобретение соответствует условию патентоспособности "новизна".
Результаты исследований известных решений в данной и смежных областях техники (в частности, в радиотелеметрии) с целью выявления признаков, совпадающих с отличительными от прототипа признаками предлагаемого изобретения, показали, что оно не следует явным образом из известного уровня техники.
Заявителем не обнаружено известное влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижение требуемого технического результата. В частности, изобретением не предусматриваются следующие преобразования:
дополнение известного способа какой-либо известной частью для достижения технического результата, обусловленного именно таким дополнением;
замена какой-либо части известного способа другой известной частью для достижения технического результата, обусловленного именно такой заменой;
исключение какой-либо части известного способа с одновременным исключением обусловленной ее наличием функции и достижением при этом обычного для такого исключения результата;
увеличение количества однотипных элементов для усиления технического результата, обусловленного наличием в способе именно таких элементов.
Таким образом, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Изобретение поясняется чертежами.
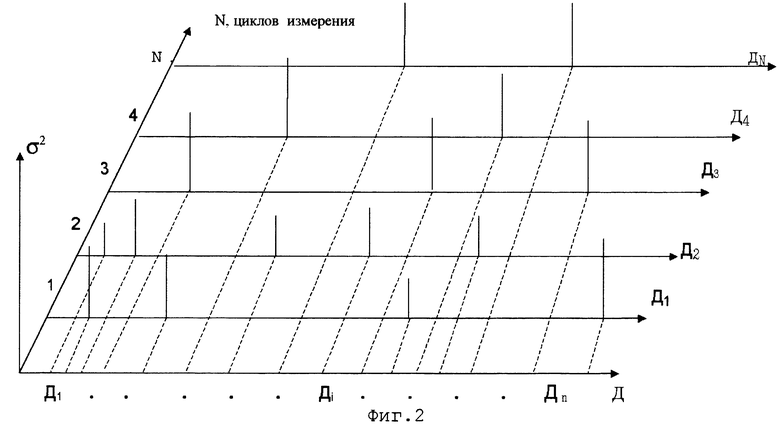
На фиг. 1 приведены зависимости угловой скорости  линии визирования 2-го ЛА от дальности Д при маневрировании 1-го ЛА.
линии визирования 2-го ЛА от дальности Д при маневрировании 1-го ЛА.
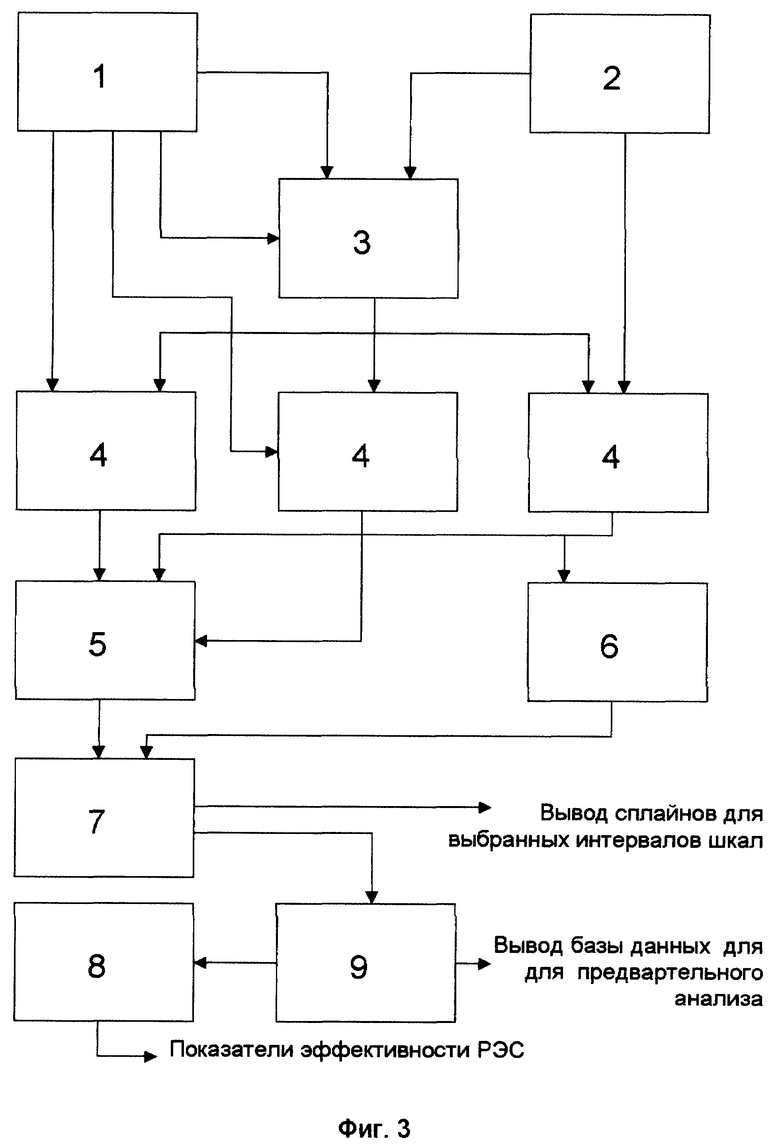
На фиг. 2 изображена процедура получения дискретных шкал для признаков фазовых координат испытываемого объекта на примере измерения одного из параметров выходного сигнала радиолокационной головки самонаведения (РГС).
На фиг. 3 показана структурная схема совместной обработки информации по результатам натурных измерений в испытательных полетах.
Способ проведения натурно-модельных испытаний заключается в следующем.
Испытываемую РЭС, например РГС, контрольно-измерительную и записывающую аппаратуру размещают на 1-ом ЛА, например самолете-летающей лаборатории. Средства воздействия на испытываемую РЭС, например станцию активных помех, и взаимодействия с ней, например аппаратуру передачи данных, размещают на 2-ом ЛА (2-ой ЛА может использоваться только для радиолокационного контакта с 1-ым ЛА). При некоторых специальных видах испытаний возможно участие более двух ЛА, однако для пояснения существа предлагаемого способа достаточно ограничиться двумя ЛА.
Перед полетом выполняют традиционное имитационное моделирование процесса функционирования РЭС в составе своего носителя, например наведения управляемой ракеты, для определения области физического пространства, в пределах которой могут быть реализованы траектории полета 1-го ЛА, и диапазона требуемых угловых скоростей линии визирования 2-го ЛА.
Проводят испытательный полет, в ходе которого 1-ый ЛА периодически осуществляет сближение со 2-ым ЛА в пределах найденной при моделировании области пространства возможных траекторий полета носителя РЭС, например ракеты. Для учета динамики полета носителя 1-ый ЛА, сближаясь со 2-ым ЛА, выполняет маневрирование по направлению в пределах располагаемого диапазона углов визирования 2-го ЛА с определенной угловой скоростью линии визирования.
В течение реального времени работы испытываемой РЭС излучают радиосигналы этой РЭС и радиосигналы, воздействующие на нее.
Измеряют траекторные параметры летательных аппаратов, а прием и регистрацию выходных сигналов РЭС производят только в те отрезки времени, когда фазовые координаты 1-го ЛА совпадают с аналогичными координатами того носителя РЭС, в составе которого она предназначена работать. Другими словами, используют только отдельные выборки из записей выходных сигналов РЭС.
Результаты испытательного полета, записанные на выборочных ("информативных") отрезках траектории полета 1-го ЛА, обрабатываются для получения параметров выходных сигналов РЭС в различных ситуациях. Это поясняется зависимостью угловой скорости  линии визирования 2-го ЛА от дальности Д (времени t) при маневрировании 1-го ЛА на скорости 300 м/с с нормальной перегрузкой 2g при удалении 2-го ЛА от 1-го ЛА в момент начала маневра порядка 1800 м и пеленгах 30 град, 32 град и 34 град (соответственно кривые 1, 2, 3 на фиг. 1). На этом же чертеже показана аналогичная зависимость, полученная путем моделирования наведения управляемой ракеты (кривая 4). Из анализа зависимостей на фиг. 1 следует, что даже при десятикратном различии между располагаемыми перегрузками у 1-го ЛА и ракеты маневрирование по направлению позволит 1-му ЛА в течение интервалов времени Δti, i=1, 2, 3, 4 порядка (1. . .2) с обеспечить такие же условия функционирования РГС, как и при реальном наведении управляемой ракеты (интервалы Δti образуются в местах пересечения кривой 4 с кривыми 1, 2, 3).
линии визирования 2-го ЛА от дальности Д (времени t) при маневрировании 1-го ЛА на скорости 300 м/с с нормальной перегрузкой 2g при удалении 2-го ЛА от 1-го ЛА в момент начала маневра порядка 1800 м и пеленгах 30 град, 32 град и 34 град (соответственно кривые 1, 2, 3 на фиг. 1). На этом же чертеже показана аналогичная зависимость, полученная путем моделирования наведения управляемой ракеты (кривая 4). Из анализа зависимостей на фиг. 1 следует, что даже при десятикратном различии между располагаемыми перегрузками у 1-го ЛА и ракеты маневрирование по направлению позволит 1-му ЛА в течение интервалов времени Δti, i=1, 2, 3, 4 порядка (1. . .2) с обеспечить такие же условия функционирования РГС, как и при реальном наведении управляемой ракеты (интервалы Δti образуются в местах пересечения кривой 4 с кривыми 1, 2, 3).
По результатам совместной обработки информации, полученной в процессе сближения 1-го ЛА со 2-ым ЛА, формируется специальный программный модуль-база данных. На фиг. 2 условно показаны результаты измерений дисперсии σ2 выходного сигнала РГС по каналу пеленга для различных значений признака-дальности Дi (i =1, 2, 3, ... , n) 1-го ЛА до 2-го ЛА. Шкалы формируются в результате проекции выделенных для каждого цикла измерений (захода 1-го ЛА) дискретных значений дальности на общую ось (всего N циклов измерений). Для многомерной базы данных в этом случае значительная часть дискретов будет не заполнена. Задача заполнения базы данных решается методом сглаживания. На фиг. 2 видно, что результаты натурных измерений различных циклов суммируются в базе данных. Предварительное моделирование позволяет определить требования для условий проведения натурных измерений, минимизирующие затраты на испытательные полеты.
Показатели эффективности РЭС определяют с помощью имитационной модели процесса функционирования РЭС, управляемого от базы данных.
Физическая сущность предлагаемого технического решения представлена на фиг. 3 применительно к РГС (1-ый ЛА) и станции помех (2-ой ЛА), создаваемых этой головке. Совместная обработка информации, полученной при периодическом сближении 1-го ЛА со 2-ым ЛА, проводится в три этапа согласно следующему алгоритму.
На первом этапе оцениваются:
а) параметры собственного движения 1-го ЛА с управляемой ракетой (углы курса и тангажа в привязанной к 1-му ЛА системе координат) (блок 1);
б) координаты 1-го ЛА (X,Y,Z) и 2-го ЛА в системе координат внешнетраекторных измерений (блок 2);
в) параметры выходных сигналов РГС (блок 1):
ошибки рассогласования пеленгатора;
измеренные углы визирования цели;
разовые команды.
Данные, перечисленные в подпунктах а), б) и в), выводятся в виде графиков для анализа и определения "информативных" временных интервалов обработки (блок 3).
На втором этапе определяются вектор измеренных параметров (блок 5) и вектор наблюдаемых параметров (блок 6) и осуществляется сглаживание этих параметров по результатам многократных измерений (блок 7). В частности по выходным сигналам РГС определяются значения угловой скорости линии визирования 2-го ЛА и параметры движения 2-го ЛА относительно 1-го ЛА с привязкой к определенным фазам функционирования РГС.
Задача второго этапа обработки информации заключается в формировании базы данных для имитационного моделирования. Эту задачу предполагается решать с применением неформализованных операций, а именно - путем анализа специалистами визуализированных записей параметров и сигналов на выходе РЭС. В результате такого анализа специалистами выделяются характерные ("информативные") интервалы с относительной стационарностью выходных сигналов РЭС (блок 4 формирования выборок). В частности, для каждого захода 1-го ЛА определяются интервалы времени (tнi, tкi), на которых наблюдаются постоянные значения параметров выходных сигналов РЭС и соответствующие этим интервалам значения дальности Дi и угловой скорости  здесь нижние индексы "н" - начало интервала, "к" - конец интервала, i= 1, 2, 3, ..., n - номер интервала). База данных для имитационного моделирования формируется путем сведения результатов вычислений в многомерный массив.
здесь нижние индексы "н" - начало интервала, "к" - конец интервала, i= 1, 2, 3, ..., n - номер интервала). База данных для имитационного моделирования формируется путем сведения результатов вычислений в многомерный массив.
На третьем этапе с помощью имитационной модели ракеты с РГС (блок 8), управляемой от базы данных (блок 9), определяются показатели эффективности функционирования испытываемых РЭС.
Как видно из вышеизложенного, в заявленном "Способе проведения натурно-модельных испытаний радиоэлектронных систем", устраняются такие недостатки прототипа как обязательное наличие непрерывных реализаций выходных сигналов испытываемых РЭС и большие материальные и финансовые затраты при испытаниях новых и модернизируемых бортовых систем радиолокации, радиоуправления и радиопротиводействия.
Таким образом, приведенные сведения свидетельствуют о выполнении при использовании изобретения следующих условий:
техническое решение относится к области авиационной техники, а именно - к бортовым системам радиолокации, радиоуправления и радиопротиводействия и предназначено для определения технического уровня указанных систем по результатам специально организованных испытательных полетов;
для заявленного изобретения в том виде, в котором оно охарактеризованно в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке или известных до даты подачи заявки средств и методов;
способ, воплощающий заявленное изобретение, может обеспечить требуемый технический результат.
Все это позволяет утверждать, что заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2022297C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ | 1994 |
|
RU2124711C1 |
| БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018869C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2041463C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| СПОСОБ КОНТРОЛЯ ДЕЯТЕЛЬНОСТИ ОПЕРАТОРА НА АВИАЦИОННОМ ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1831958A3 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
Изобретение относится к моделированию в авиационной технике и может быть использовано для определения технического уровня радиоэлектронных систем. Техническим результатом является уменьшение объема и сроков проведения испытаний. Способ включает имитационное моделирование и натурно-модельный эксперимент, в котором участвуют два летательных аппарата, при этом осуществляют излучение и прием радиосигналов испытываемой системы, производят регистрацию и обработку принятых сигналов, на основе которой определяют фазовые координаты системы в составе двух летательных аппаратов, используемые в качестве входных данных в имитационной модели для получения показателей эффективности испытываемой системы, причем прием и регистрацию радиосигналов испытываемой системы производят только в те отрезки времени, когда фазовые координаты летательного аппарата с испытываемой системой совпадают с аналогичными координатами реального носителя данной радиоэлектронной системы. 3 ил.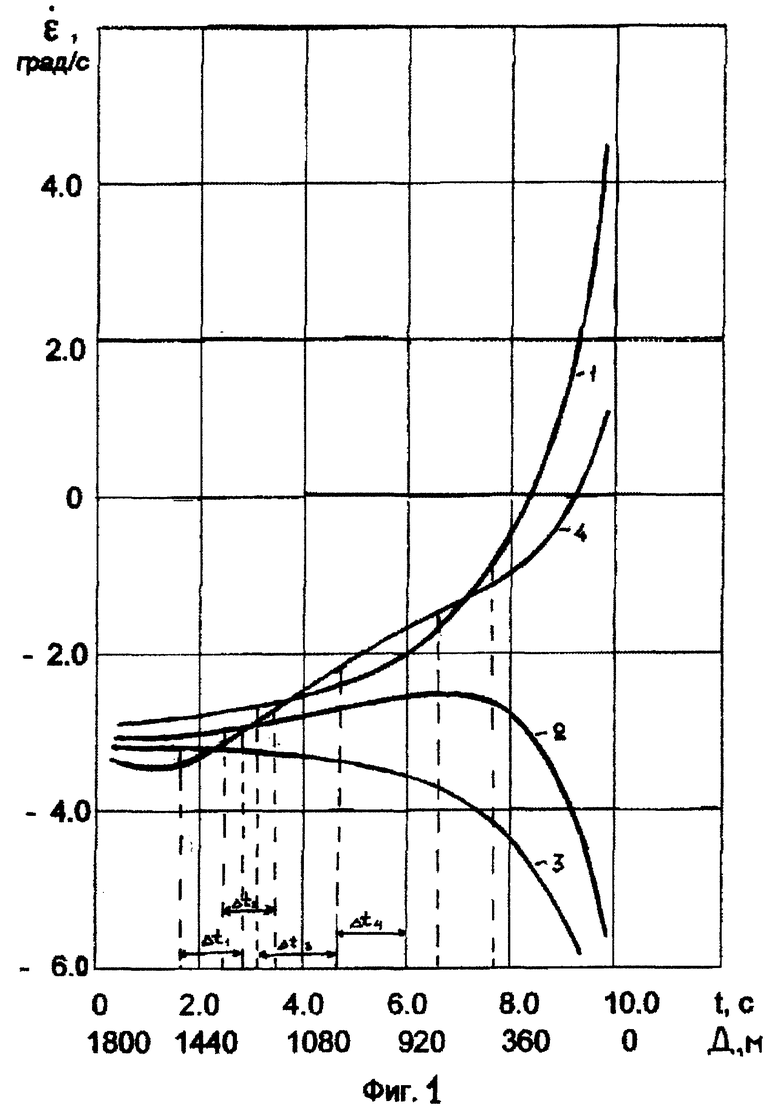
Способ проведения натурно-модельных испытаний радиоэлектронных систем, включающий имитационное моделирование и натурно-модельный эксперимент, при котором испытываемую радиоэлектронную систему, контрольно-измерительную и записывающую аппаратуру устанавливают на первом летательном аппарате, например самолете-летающей лаборатории, средства воздействия на испытываемую радиоэлектронную систему и взаимодействия с ней устанавливают на втором летательном аппарате, производят полет обоих летательных аппаратов, в течение реального времени работы испытываемой радиоэлектронной системы излучают радиосигналы этой системы и радиосигналы, воздействующие на нее, на первом летательном аппарате принимают радиосигналы, отраженные от второго летательного аппарата, и радиосигналы, воздействующие на испытываемую радиоэлектронную систему, регистрируют сигналы, принимаемые радиоэлектронной системой, и сигналы датчиков параметров первого и второго летательных аппаратов, производят обработку всех принятых сигналов, на основе которой определяют фазовые координаты системы в составе первого и второго летательных аппаратов, эти фазовые координаты используют в качестве входных данных при имитационном моделировании, в результате которого получают сигналы, пропорциональные величинам показателей эффективности функционирования испытываемой радиоэлектронной системы, отличающийся тем, что полет первого летательного аппарата производят в предварительно определенной области физического пространства с выдерживанием заданного диапазона угловых скоростей линии визирования второго летательного аппарата и осуществляют периодические сближения первого летательного аппарата со вторым, при этом измеряют траекторные параметры летательных аппаратов, а прием и регистрацию выходных сигналов испытываемой радиоэлектронной системы производят только в те отрезки времени, когда фазовые координаты первого летательного аппарата совпадают с аналогичными координатами для реального носителя данной радиоэлектронной системы.
| Баклашов Н.И | |||
| и др | |||
| Натурный эксперимент | |||
| Информационное обеспечение экспериментальных исследований | |||
| - М.: Радио и связь, 1982, с.21-30 | |||
| US 5323309 А, 21.06.94 | |||
| Жигилей B.C | |||
| Основы теории планирования многофакторных испытаний | |||
| - Л.: ВИКИ им | |||
| А.Ф.Можайского | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Устройство для проведения многофакторного эксперимента | 1978 |
|
SU729554A1 |
| Устройство для проведения многофакторного эксперимента | 1981 |
|
SU1004980A1 |
| Устройство для проведения многофакторного эксперимента | 1989 |
|
SU1691820A1 |
| RU 2003165 C1, 15.11.93. | |||
