Изобретение относится к автоматическому регулированию и может быть использовано в цифровых следящих системах для настройки параметров системы близким к оптимальным. Одним из важнейших требований, предъявляемых к цифровым следящим системам, является обеспечение точности ее работы.
В известной самонастраивающейся системе управления для объектов с запаздыванием [1] для повышения точности в предлагаемом устройстве используются аналоги объекта регулирования - их математические модели, однако создание математических моделей сложных объектов регулирования представляют собой трудоемкую задачу.
Известна цифровая следящая система [2], взятая в качестве прототипа.
Система содержит задающее устройство, цифровой вычитатель, цифроаналоговый преобразователь (ЦАП), усилительно-преобразующее устройство, двигатель, редуктор, преобразователь угол-код, цифровой сумматор, цифровой измеритель скорости, генератор опорной частоты, элементы И, счетчики, элементы И-НЕ, регистры памяти, коммутатор, инвертор.
В системе в дополнение к сигналу ошибки вырабатывается дополнительное регулирующее воздействие, являющееся функцией модуля сигнала ошибки и скорости изменения выходной величины.
К недостаткам данной цифровой системы следует отнести отсутствие контроля состояния параметров системы и их автоматической настройки к значениям, близким к оптимальным, при изменении условий эксплуатации. Время, затрачиваемое на расчет дополнительного регулирующего воздействия, вносит запаздывание в реакцию системы на изменения сигнала ошибки, что ухудшает точность слежения, особенно в режиме переходного процесса.
Введение новых дополнительных блоков времени переходного процесса, выделение знака ошибки и скорости: памяти допустимой ошибки и доли дискретного изменения параметров системы с накоплением этих долей позволяет исключить уход параметров системы от их оптимальных значений при изменении внешних условий эксплуатации.
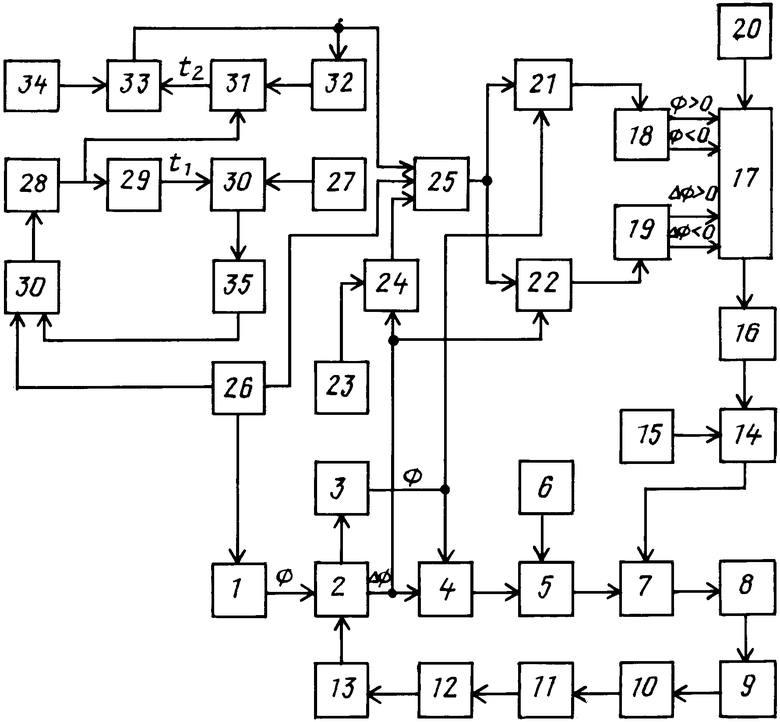
На чертеже изображена блок-схема.
Цифровая следящая система содержит задающее устройство 1, первый вычитатель 2, цифровой дифференциатор 3, сумматор 4, умножитель 5, регистр 6 памяти, умножитель 7, цифроаналоговый преобразователь (ЦАП) 8, усилитель 9, двигатель 10, редуктор 11, синусно-косинусный трансформатор 12, регистр 15 памяти, аналого-цифровой преобразователь (АЦП) 13, вычитатель 14, регистр-накопитель 16, умножитель 17, формирователь 18 знака ошибки, формирователь 19 знака скорости, регистр 20 памяти, первый и второй коммутаторы 21, 22, регистр 23 памяти, пороговый элемент 24, элемент И 25, задатчик 26 признака режима контроля, регистр 27 памяти, задающий генератор 28 частоты, счетчик 29 времени, первый элемент 30 сравнений, счетчик 31 времени, элемент 32 обнуления, элемент 33 сравнения, регистр 34 памяти, элемент НЕ 35, элемент И 36.
Блоки 2 - 13 представляют собой цифровую следящую систему с единичной обратной связью и компенсирующей цепочкой по скорости 3. Обозначим Кс= Ксц˙Кса, где Кс - разомкнутый коэффициент усиления основного канала следящей системы 2,4...13;
Ксц и Кса - его цифровая 2,4...7 и аналоговая 8...13 части.
Обозначим также Кк - коэффициент усиления блока 3 компенсирующей цепочки по скорости, передаточную функцию аналоговой части, равной:
W(P)=  ,, где Т - эквивалентная постоянная времени усилитель-двигатель.
,, где Т - эквивалентная постоянная времени усилитель-двигатель.
Тогда динамическая ошибка Δ Ф системы записывается в виде:
ΔΦ = 
 +
+
 -
-  , где
, где  ,
,  - скорость и ускорение задающего воздействия.
- скорость и ускорение задающего воздействия.
Коэффициент Кк выбирается равным Кк=1/Кс (условие инвариантности), при этом в соответствии с формулой минимизируется динамическая ошибка. В процессе эксплуатации, особенно при изменении температуры окружающей среды, коэффициент Кса может изменяться в любую сторону, соответственно изменяется коэффициент Кс и тем самым нарушается условие инвариантности (коэффициенты Ксц и Кк не изменяются, так как реализованы в цифровом виде). Динамическая ошибка начинает существенно возрастать. Для сохранения условия инвариантности необходимо изменить коэффициент Ксц, компенсируя изменение коэффициента Кса, а тем самым сохранить постоянным значение коэффициента Кс, что необходимо не только с целью минимизации ошибки, но и сохранения устойчивости и быстродействия системы. Для коррекции коэффициента Ксц предлагается цифровое устройство 7, 14...36, позволяющее в зависимости от знака ошибки, знака скорости воздействия с учетом переходного процесса в системе и дискретного изменения коэффициента усиления цифровой части системы минимизировать динамическую ошибку до величины, являющейся допустимой для системы.
Принцип работы устройства заключается в следующем.
При установке задатчика 26 признака режима контроля в единичное состояние в блоке 1 вырабатывается эталонный сигнал Ф(t), поступающий на входе следящей системы (блоки 2,,,13). Сигнал Ф(t) может быть задан, например, в виде Ф(t)= (t). где Фо - постоянная скорость изменения сигнала.
(t). где Фо - постоянная скорость изменения сигнала.
В регистре 23 памяти хранится значение допустимой для системы динамической ошибки Δ Фдоп и при текущей динамической ошибке Δ Ф> Δ Фдоп с элемента 24 на один из входов элемента И 25 поступает сигнал разрешения коррекции Ксц. На два других входа элемента И 25 поступают признак режима контроля с задатчика 26 и сигнал с элемента 33 сравнения, формируемый следующим образом.
По сигналу задатчика 26 через элемент И 36 включается задающий генератор 28 и начинается отсчет времени счетчиками 29 и 31. Обозначим через t1 и t2 текущее время счетчиков 29, 31, а через tk(1) и tk(2) - временные константы, хранящиеся в регистрах 27 и 34 памяти и представляющие собой tk(1) - общее время коррекции; tk(2) - время переходного процесса в системе.
При t2=tk(2) с элемента 33 поступает сигнал на элемент 25 и одновременно на элемент 32 обнуления времени t2. Процесс сравнения t2=tk(2) повторяется несколько раз за время режима контроля и, соответственно, через промежутки времени tk(2) дискретно с элемента 33 выдается сигнал на элемент 25 разрешения коррекции Ксц. При t1>tk(1) с элемента 30 сравнения поступает сигнал на инвертор 35 и через элемент 36 запрещается работа генератора 28. Время tk(1) > tk(2) и равно tk(1)=n ˙ t k(2), где n - число коррекций. При наличии сигнала с выхода элемента И 25 на элементах 7,14...22 проводится коррекция Ксц по формуле Ксц=Ксц (1-Δ Ксц ˙ n ˙ Sign Δ ФSingФ) (1) где Ксц - номинальный коэффициент усиления цифровой части, хранится в регистре 6 памяти;
Δ Ксц - доля изменения Ксц за один шаг коррекции, хранится в регистре 20 памяти;
n - число шагов коррекции.
sign ΔΦ( ) - функция выделения знака
) - функция выделения знака  (
( )
)
sign ΔΦ( )=
)=


Значения ΔΦ и  через коммутаторы 21 и 22 при наличии сигнала с элемента И 25 поступают на формирователи знака ошибки 18 и знака скорости 19 и далее на умножитель 17, на который также поступает значение Δ Ксц с элемента 20, с последующим сложением на регистре-накопителе 16 n раз результатов умножения. На вычитателе 14 из двоичной единицы, хранящейся в регистре 15 памяти, вычитаются значения, накопленные в регистре-накопителе, с последующей коррекцией Ксц на умножителе 7 в соответствии с формулой (1). Сигнал рассогласования системы с выхода сумматора 4, равный ΔΦ+
через коммутаторы 21 и 22 при наличии сигнала с элемента И 25 поступают на формирователи знака ошибки 18 и знака скорости 19 и далее на умножитель 17, на который также поступает значение Δ Ксц с элемента 20, с последующим сложением на регистре-накопителе 16 n раз результатов умножения. На вычитателе 14 из двоичной единицы, хранящейся в регистре 15 памяти, вычитаются значения, накопленные в регистре-накопителе, с последующей коррекцией Ксц на умножителе 7 в соответствии с формулой (1). Сигнал рассогласования системы с выхода сумматора 4, равный ΔΦ+ /Kк, умножается на элементе 5 на номинальный коэффициент усиления Ксц и корректируется на умножителе 7. После выполнения коррекции коэффициента усиления в режиме контроля система готова к работе в штатном режиме. При изменении внешних условий эксплуатации (изменения) для оптимизации коэффициента усиления следящей системы и уменьшения динамической ошибки необходимо провести режим контроля, по включении которого автоматически произойдет подстройка коэффициента усиления цифровой части следящей системы. Подстройка коэффициента усиления следящей системы позволит повысить стабильность работы системы, надежность ее эксплуатации в составе изделия.
/Kк, умножается на элементе 5 на номинальный коэффициент усиления Ксц и корректируется на умножителе 7. После выполнения коррекции коэффициента усиления в режиме контроля система готова к работе в штатном режиме. При изменении внешних условий эксплуатации (изменения) для оптимизации коэффициента усиления следящей системы и уменьшения динамической ошибки необходимо провести режим контроля, по включении которого автоматически произойдет подстройка коэффициента усиления цифровой части следящей системы. Подстройка коэффициента усиления следящей системы позволит повысить стабильность работы системы, надежность ее эксплуатации в составе изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ КОРРЕКТОРА МЕЖСИМВОЛЬНОЙ ИНТЕРФЕРЕНЦИИ | 1991 |
|
RU2034404C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Умножитель частоты следования импульсов | 1989 |
|
SU1728964A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Установка для присоединения проволочных выводов | 1988 |
|
SU1549698A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
Изобретение относится к автоматическому регулированию и может быть использовано, например, в оптико-электронных приборах, имеющих следящий привод управления оптическим элементом. Устройство содержит задатчик эталонного сигнала, счетчики времени, регистры памяти, умножители, вычитатели, коммутаторы, инверторы, позволяющие производить автоматическую, близкую к оптимальной, настройку параметров следящей системы в зависимости от знака ошибки, знака скорости входного воздействия с учетом времени переходного процесса в системе. Введение новых элементов и образование новых связей между элементами устройства позволяют повысить точность работы следящей системы в условиях широкого диапазона температуры окружающей среды. 1 ил.
ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА, содержащая задающее устройство, выход которого соединен с первым входом первого вычитателя, вторым входом подключенного к выходу первого цифроаналогового преобразователя, вход которого соединен с последовательно соединенными синусно-косинусным трансформатором, редуктором, двигателем, усилителем и аналого-цифровым преобразователем, вход которого подключен к выходу первого умножителя, первый вход которого соединен с выходом второго вычитателя, второй вход - с выходом второго умножителя, первый вход которого соединен с выходом первого регистра памяти, а второй вход - с выходом первого сумматора, первый вход которого соединен с информационным входом первого коммутатора и выходом дифференциатора, вход которого подключен к выходу первого вычитателя, второй вход второго вычитателя соединен с выходом второго регистра памяти, а также два элемента И, первый и второй счетчики времени, задающий генератор частоты, отличающаяся тем, что введены задатчик признака режима контроля, формирователь знака ошибки, формирователь знака скорости, два элемента сравнения, пороговый элемент, второй коммутатор, третий умножитель, четыре регистра памяти, регистр-накопитель, элемент обнуления и элемент НЕ, вход которого соединен с выходом первого элемента сравнения, а выход - с первым входом первого элемента И, второй вход которого подключен к первому выходу задатчика признака режима контроля, второй выход которого соединен с входом задающего устройства, третий выход - с первым входом второго элемента И, второй вход которого соединен с выходом порогового элемента, третий вход - с входом элемента обнуления и выходом второго элемента сравнения, первый вход которого подключен к выходу третьего регистра памяти, второй вход второго элемента сравнения соединен с выходом первого счетчика времени, вход сброса которого подключен к выходу элемента обнуления, а счетный вход соединен с выходом задающего генератора частоты и со счетным входом второго счетчика времени, выход которого подключен к первому входу первого элемента сравнения, второй вход которого соединен с выходом четвертого регистра памяти, выход первого элемента И подключен к управляющему входу задающего генератора частоты, выход второго элемента И соединен с управляющими входами первого и второго коммутаторов, информационный вход второго коммутатора подключен к выходу первого вычитателя, а выход через формирователь знака скорости соединен с первым и вторым входами третьего умножителя, третий и четвертый входы которого соединены через формирователь знака ошибки с выходом первого коммутатора, пятый вход - с выходом пятого регистра памяти, а выход - с входом регистра-накопителя, выход которого соединен с вторым входом второго вычитателя, выход шестого регистра памяти подключен к второму входу порогового элемента.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая следящая система | 1986 |
|
SU1416936A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
