Изобретение относится к подъемно-тяговым устройствам транспортного средства на магнитной подвеске, а более конкретно - к подъемно-тяговым устройствам на магнитной подвеске с автономно управляемыми модулями, т.е. такими модулями, необходимые перемещения которых при соответствующем управлении осуществляется независимо от перемещений модулей противоположного борта экипажа транспортного средства.
Известно подъемно-тяговое устройство транспортного средства на магнитной подвеске, состоящее из автономно управляемых электромагнитных тягово-подъемных моделей [1]. Каждый модуль устройства содержит установленные в два параллельных ряда три или четыре электромагнита, индуктор двигателя, расположенный между рядами электромагнитов, модуль установлен на элементах рессорной подвески. Устройство обеспечивает управляемый по всем необходимым степеням свободы трехточечный подвес, а линейный электродвигатель, расположенный между двумя рядами электромагнитов, создают продольную силу тяги, которая передается на экипаж транспортного средства. Подъемно-тяговое устройство состоит из ТПМ, связанных узлами передачи продольного усилия с кронштейнами экипажа, кронштейны опираются на вертикальные пружины, нижние торцы которых опираются на каретки, подвешенные относительно ТПМ на четырех вертикальных штырях. Это позволяет кареткам отклоняться в поперечном направлении при прохождении поворотов экипажем транспортного средства. Каретки соседних модулей соединены между собой упругой связью.
Недостаток этой конструкции подъемно-тягового устройства - наличие на каждом ТПМ четырех вертикальных штырей. Они мешают беспрепятственному перемещению и управлению тягоподъемным модулем по крену, из-за чего требуется сложный алгоритм управления.
Ближайшим по технической сущности и достигаемому эффекту к изобретению является подъемно-тяговое устройство транспортного средства на магнитной подвеске [2] . Эта конструкция состоит из автономно управляемых электромагнитных тягово-подъемных модулей. Автономность управления подвеской достигается благодаря наличия четырех электромагнитов в каждом модуле, расположенных в два ряда в одной горизонтальной плоскости. Сила тяги создается линейным электродвигателем, расположенным между двумя рядами электромагнитов. Модули установлены на подпружиненных относительно кронштейнов экипажа транспортного средства каретки и связаны между собой вертикальными штырями с шарнирными узлами на концах. Между кронштейнами экипажа и электромагнитными тягово-подъемными модулями установлены узлы передачи продольного усилия.
Недостатки прототипа - ненадежность конструкции шарнирных узлов, обеспечивающих повороты по крену, тангажу и рысканию, конструктивное выполнение связи соседних модулей из-за наличия втулок скольжения, склонных к заклиниванию при осевом перемещении вдоль штыря, и из-за наличия дополнительных элементов - боковых пружин.
Цель изобретения - повышение надежности.
Цель достигается тем, что в подъемно-тяговом устройстве транспортного средства, содержащем связанные между собой автономно управляемые модули с боковыми электромагнитами, установленными с возможностью взаимодействия с соответствующими ферромагнитными рельсами, и центральным индуктором, установленным с возможностью взаимодействия с продольным вторичным элементом, подпружиненные относительно кронштейнов экипажа транспортного средства каретки крепления модулей, шарнирно соединенные с нижними частями вертикальных штырей, верхние части которых снабжены другими шарнирами, и узлы передачи продольного усилия, установленные между модулями и упомянутыми кронштейнами, - расположенный в верхней части каждого штыря шарнир выполнен из трех концентрических сфер, посредством которых упомянутый штырь соединен с двумя соседними модулями. Ось шарнира, размещенного в нижней части каждого штыря, направлена параллельно продольной оси экипажа. Каретки модулей выполнены двухсекционными. Обращенные друг к другу секции соседних модулей жестко связаны между собой. Устройство может быть снабжено параллелограммными механизмами, установленными между каретками и кронштейнами.
Отличия изобретения сводятся к форме выполнения верхнего шарнира (шарнир выполнен в виде трех концентричных сфер), месту установки шарнира, и месту установки оси нижнего шарнира. Эти отличия обеспечивают возможность не использовать целый ряд элементов и связей между ними, присущих прототипу, что и способствует достижению цели повышения надежности устройства.
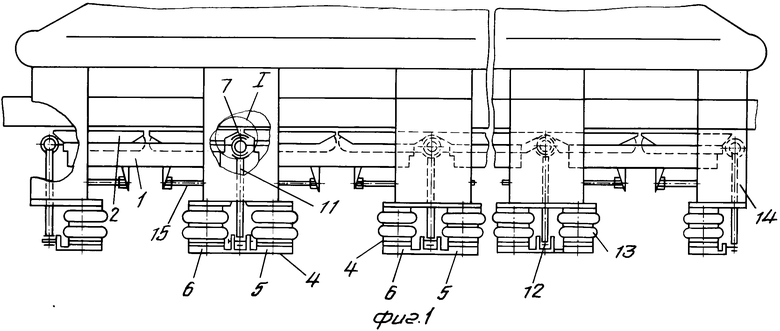
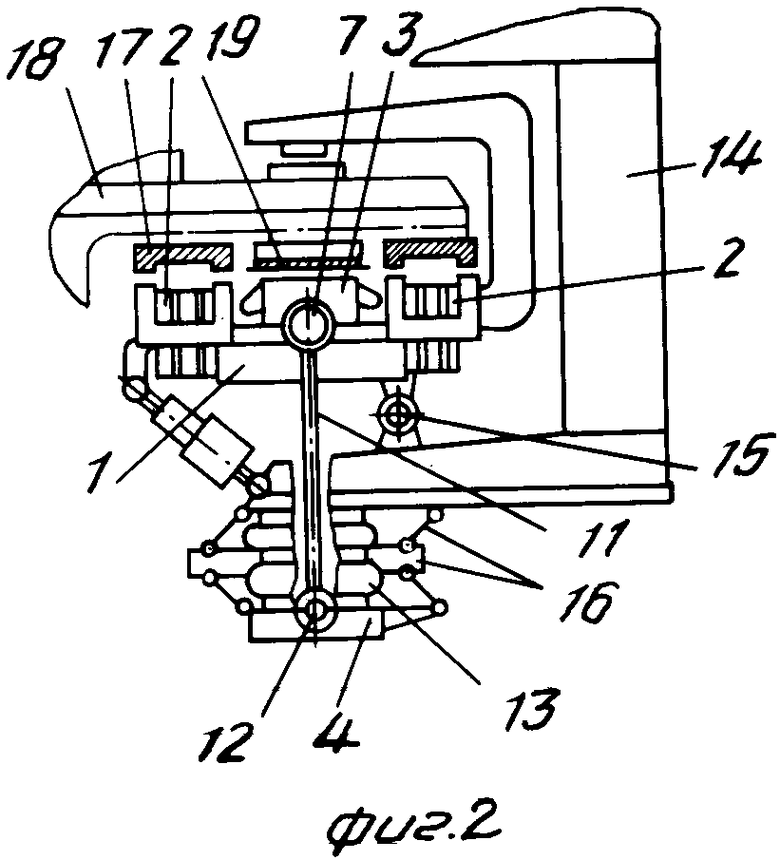
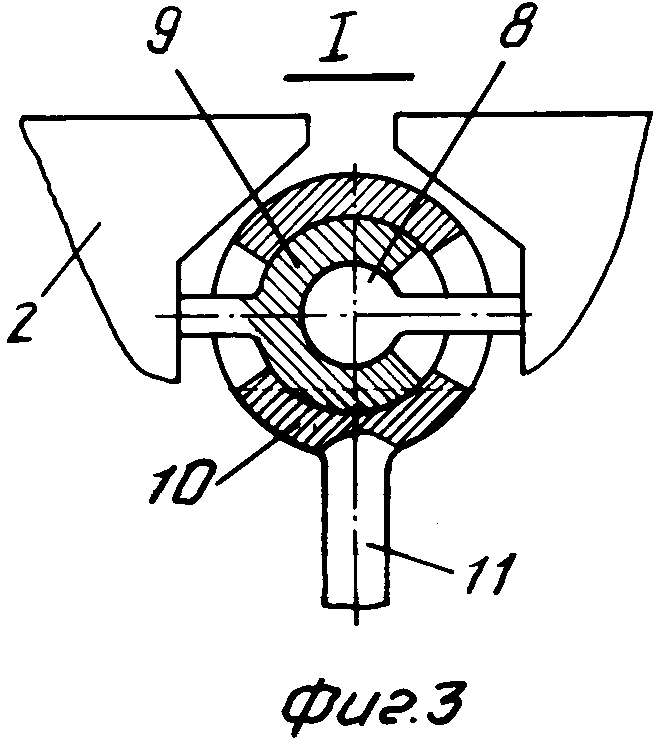
На фиг.1 представлено подъемно-тяговое устройство, вид сбоку; на фиг.2 - то же, вид спереди; на фиг.3 - узел I на фиг.1.
Подъемно-тяговое устройство экипажа транспортного средства содержит тягово-подъемные модули 1, включающие в себя две пары продольно расположенных электромагнитов 2, между которыми расположен индуктор 3 линейного электродвигателя. Каждый модуль 1 закреплен на каретке 4, состоящей из двух секций 5 и 6. Соседние секции кареток 4 соседних модулей 1 жестко связаны между собой. Соседние модули 1 в продольном направлении связаны шарниром 7, выполненным из трех концентричных сфер 8, 9 и 10. Наружная сфера 10 снабжена вертикальным штырем 11, на нижней части которого имеется шарнир 12 с осью, параллельной оси экипажа. С помощью этого шарнира 12 вертикальный штырь 11 соединен с кареткой 4. На каждой из двух секций 5 и 6 каретки 4 установлена пружина 13, на которую опирается кронштейн 14 экипажа. Между модулями 1 и кронштейнами 14 установлены узлы 15 передачи продольного усилия от модулей 1 на экипаж. Между кронштейнами 14 и каретками 4 расположены параллелограммные механизмы 16. Электромагниты 2 предназначены для взаимодействия с ферромагнитными рельсами 17 путевого полотна 18, а индуктор 3 - для взаимодействия с продольным вторичным элементом 19.
Подъемно-тяговое устройство работает следующим образом.
При включении электропитания на электромагниты 2 и индуктор 3 линейного электродвигателя каждого из модулей 1 транспортного средства на магнитной подвеске, последнее взвешивается и движется с заданной скоростью на путевым полотном 18. Транспортное средство опирается своими кронштейнами 14 на пружины 13 и комфортно качается на них в вертикальном направлении относительно кареток 4. Каждый модуль 1, связанный с помощью вертикального штыря 11, шарнира 7 и осевого шарнира 12 с кареткой 4, воспринимает неровности пути, возникающие при движении, и благодаря выполнению шарнира из трех сфер 8, 9 и 10 совершает управляемые системой регулирования повороты по крену, тангажу, рысканию. При прохождении поворотов экипаж транспортного средства перемещается в поперечном направлении (вправо или влево). При этом вертикальный штырь 11 отклоняется относительно своей вертикальной оси, поворачиваясь в шарнирах 7 и 12. При разгоне и торможении усилие от модулей 1 на кронштейны 14 (или наоборот) передается через узлы 15 передачи продольного усиления.
Во избежание непараллельного перемещения верхнего и нижнего оснований пружины 13, которое может снизить ее долговечность, кронштейн 14 и каретка 4 связаны параллелограммным механизмом 16.
Выполнение вертикального штыря с шарниром из трех концентричных сфер на верхнем конце обеспечивает связывание соседних модулей, образуя вдоль каждого из бортов экипажа транспортного средства электромагнитную лыжу. В то же время уменьшается число вертикальных штырей, исключаются узлы, которые могут привести к заклиниванию при работе. Все это повышает надежность транспортного средства на магнитной подвеске, увеличивает время его работоспособности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНО-ТЯГОВОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА НА МАГНИТНОМ ПОДВЕСЕ С ЛИНЕЙНЫМ ЭЛЕКТРОПРИВОДОМ | 1992 |
|
RU2036807C1 |
| Подъемно-тяговое устройство для транспортной системы на магнитной подвеске | 1990 |
|
SU1788933A3 |
| ТРАНСПОРТНАЯ СИСТЕМА НА ЭЛЕКТРОМАГНИТНОМ ПОДВЕСЕ | 1989 |
|
RU1631887C |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ЭЛЕКТРОМАГНИТНОМ ПОДВЕСЕ | 1992 |
|
RU2025320C1 |
| Устройство для связи тягово-подъемного модуля с экипажем транспортного средства на электромагнитном подвесе | 1988 |
|
SU1648811A1 |
| ДИСКОВОЕ ПОЧВООБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2477035C2 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Транспортная система | 1980 |
|
SU912575A1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| ПОДВЕСНАЯ МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2219082C1 |
Использование: в транспортной технике на электромагнитной подвеске. Сущность изобретения: устройство состоит из автономно управляемых электромагнитных модулей с подъемными электромагнитами и линейным электродвигателем. Связь между модулями выполнена в виде вертикального штыря с шарнирами на концах. Верхний шарнир выполнен из трех сфер и установлен между модулями. Нижний шарнир выполнен в виде шарнира второго рода, на оси которого расположена каретка, являющаяся опорой модуля. Каждая каретка состоит из двух секций, причем обращенные друг к другу секции соседних модулей жестко связаны между собой. 1 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Транспортная система | 1980 |
|
SU912575A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
