Изобретение относится к авиационной технике, а именно к устройствам для определения аэродинамических коэффициентов летательных аппаратов.
Известно устройство для определения коэффициентов продольного движения самолета, содержащее блок умножения, блок воспроизведения параметров полета, блок формирования матрицы параметров полета системы уравнений углового движения, блок формирования обратной матрицы, первый, второй, третий, четвертый, пятый и шестой входы которого связаны с первым, вторым, третьим, четвертым, пятым и шестым выходами блока формирования матрицы параметров полета системы уравнений углового движения, блок формирования определителей матрицы, первый, второй, третий, четвертый, пятый и шестой входы которого связаны соответственно с первым, вторым, третьим, четвертым, пятым и шестым выходами блока формирования матриц параметров полета системы уравнений углового движения, а выход - с седьмым входом блока формирования обратной матрицы, первый, второй, третий, четвертый, пятый и шестой входы которого связаны соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами блока умножения, блок формирования вектора изображений углового ускорения, первый, второй и третий входы которого связаны с седьмым, восьмым и девятым входами блока умножения, блок синхронизации, первый выход которого связан с входом блока воспроизведения параметров полета.
Недостатком указанного устройства является его невысокая точность.
С целью повышения точности определения коэффициентов углового движения самолета, в устройство введены блок интегрального преобразования, первый, второй и третий входы которого связаны с первым, вторым и третьим входами блока воспроизведения параметров полета, четвертый и пятый входы - с вторым и третьим выходами блока синхронизации, а первый, второй, третий и четвертый выходы - с первым, вторым, третьим и четвертым входами блока формирования вектора изображений угловых ускорений, блок определения временного функционала и выбора коэффициентов углового движения, первый, второй и третий входы которого связаны с первым, вторым и третьим входами блока умножения, четвертый, пятый и шестой входы - с первым, вторым и третьим выходами блока воспроизведения параметров полета, а седьмой - с четвертым входом блока синхронизации.
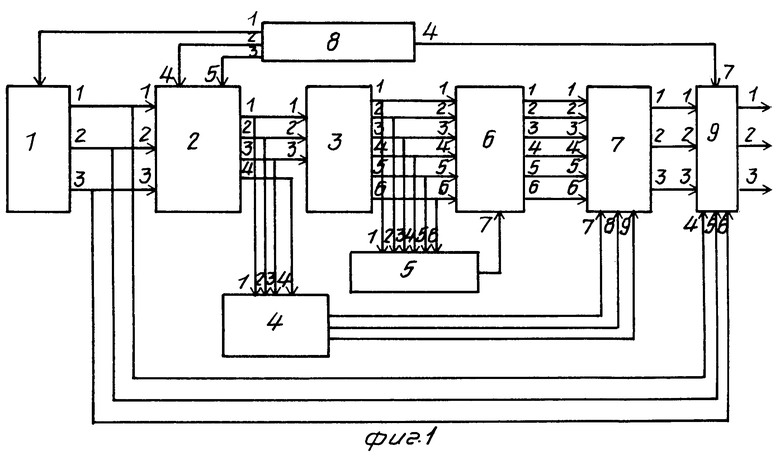
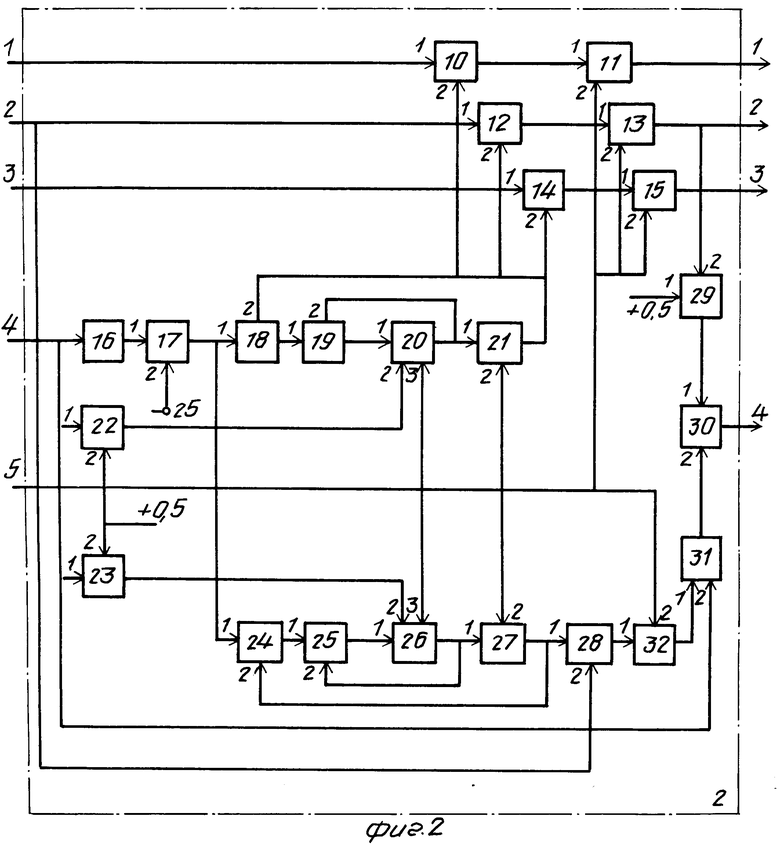
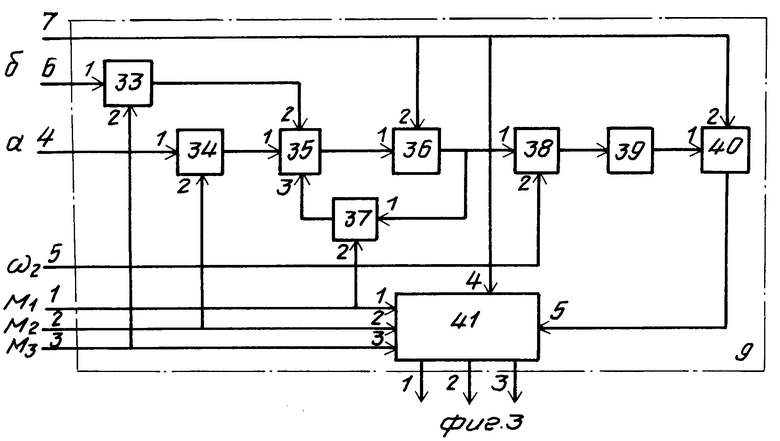
На фиг. 1 изображено устройство для определения коэффициентов продольного движения самолета; на фиг.2 - структурная схема блока интегрального преобразователя параметров полета; на фиг.3 - структурная схема блока определения временного функционала и выбора коэффициентов углового движения; на фиг. 4 - структурная схема блока определения коэффициентов углового движения.
Устройство содержит блок 1 воспроизведения параметров полета, блок 2 интегрального преобразования параметров полета, блок 3 формирования матрицы параметров полета системы уравнений углового движения, блок 4 формирования вектора изображений углового ускорения, блок 5 формирования определителя матриц, блок 6 формирования обратной матрицы, блок 7 умножения, блок 8 синхронизации, блок 9 определения временного функционала и выборки коэффициентов углового движения, блоки 10,12,14,18,28,29,31,33,34 и 37 умножения, интеграторы 11,13,15,20,21,26, 27,32,36 и 40, сумматоры 17,30,35, блоки вычитания 19,22,25 и 38, блоки 23 и 24, квадраторы 16 и 39, блок 41 выбора коэффициентов, блоки 42 и 45 памяти, блок 43 сравнения, коммутатор 44.
Устройство работает следующим образом.
По сигналам с первых трех выходов блока 8 синхронизации запускается блок 2 (фиг. 2). После завершения цикла воспроизведения записи на четырех выходах блока 2 формируются сигналы, равные сумме действительной и мнимой частей преобразования Лапласа сигналов Δα(t), ωz(t),Δδb(t),  (t) соответственно для заданного значения комплексного переменного pi = δ+jωi. Эти сигналы соответственно равны
(t) соответственно для заданного значения комплексного переменного pi = δ+jωi. Эти сигналы соответственно равны
Δα(pi) =  (t)e-σt(cosωit+sinωit)dt,
(t)e-σt(cosωit+sinωit)dt,
ωz(pi) =  (t)e-σt(cosωit+sinωit)dt,
(t)e-σt(cosωit+sinωit)dt,
Δδb(pi) =  b(t)e-σt(cosωit+sinωit)dt,
b(t)e-σt(cosωit+sinωit)dt,
Re[piωz(pi)]+Im[piωz(pi)] =  (t)e-σt(cosωit+sinωit)dt+
(t)e-σt(cosωit+sinωit)dt+
+ ωi (t)e-σt(cosωit+sinωit)dt. После этого блок синхронизации формирует сигналы на повторный цикл работы устройства в соответствии с выбранным набором значений частоты в преобразовании Лапласа. После перебора всех частот выбранной частотной области на выходе блока 7 умножения аналогично известному устройству формируются оценки трех коэффициентов углового движения самолета. После этого описанный цикл повторяется для другого набора частот ωi в преобразовании Лапласа. Полученные в результате оценки значений коэффициентов для различных наборов частот ωi в преобразовании Лапласа сравниваются и после полного цикла работы устройства на выходе формируются оценки значений коэффициентов, соответствующие минимуму функционала, вида
(t)e-σt(cosωit+sinωit)dt. После этого блок синхронизации формирует сигналы на повторный цикл работы устройства в соответствии с выбранным набором значений частоты в преобразовании Лапласа. После перебора всех частот выбранной частотной области на выходе блока 7 умножения аналогично известному устройству формируются оценки трех коэффициентов углового движения самолета. После этого описанный цикл повторяется для другого набора частот ωi в преобразовании Лапласа. Полученные в результате оценки значений коэффициентов для различных наборов частот ωi в преобразовании Лапласа сравниваются и после полного цикла работы устройства на выходе формируются оценки значений коэффициентов, соответствующие минимуму функционала, вида
It=  (t)-
(t)- (t)]2dt, где ωz (t) - значение ωz (t) по результатам записи полетной информации;
(t)]2dt, где ωz (t) - значение ωz (t) по результатам записи полетной информации; (t) - значение ωz (t) в результате моделирования дифференциального уравнения
(t) - значение ωz (t) в результате моделирования дифференциального уравнения
I = M
= M
 (t)+M
(t)+M
с вычисленными коэффициентами
Mzα,Mzωz,Mzδ .
Для вычисления значений Δα(pi),ωz (pi), Δδb(pi),Re(piωz(pi)] +Im(piωz(pi)] по формулам на устройствах 16-32 (фиг.3) формируются сигналы вида
e-0,5t(cos ωi t + sin ωi t), e-0,5t(cos ωi t - sin ωi t), которые, как известно, являются решениями дифференциальных уравнений вида +
+  + ci(x) = 0,
+ ci(x) = 0,
где Ci = 0,25 - ω2, при ω > 0,5 рад/с или f > 0,1 Гц, при начальных условиях  /O/ = ωi-0,5, X/0/ = 1 для первого сигнала
/O/ = ωi-0,5, X/0/ = 1 для первого сигнала
и  /O/ = -ωi-0,5,
/O/ = -ωi-0,5,
X/0/ = 1 для второго.
При очередном восстановлении записи по сигналу от синхронизатора через пятый вход блока поступают сигналы на выставку начальных условий, равных 1, на интеграторы 21 и 27, ωi - 0,5 на интегратор 20, - ωi - 0,5 на интегратор 26 и нулевые начальные условия на интеграторы 11,13 и 15. Временная функция вида
e-0,5t(cos ωi (t) + sin ωi t) на выходе интегратора 21 умножается на значения Δα (t), ωz (t), Δδ b(t) - на блоках 10,12,14 и после интегрирования на интеграторах 11,13,15 на выходе последних формируются сигналы вида  (t)e-0,5t(cosωi+sinωit)dt,
(t)e-0,5t(cosωi+sinωit)dt,  (t)e-0,5t(cosωi+sinωit)dt,
(t)e-0,5t(cosωi+sinωit)dt,  b(t)e-0,5t(cosωi+sinωit)dt, а на выходе блока 30 образуется сигнал, равный значению
b(t)e-0,5t(cosωi+sinωit)dt, а на выходе блока 30 образуется сигнал, равный значению
Re [pi ωz (pi)] + Im [pi ωz (pi)].
Работа блока 9 (фиг.3) основана на восстановлении временной зависимости ωz (t) по найденным коэффициентом углового движения. По сигналу от синхронизатора выставляются нулевые начальные условия на интеграторах 36,40 и на блоках 31,32,33,34,35 решается дифференциальное уравнение вида
I (t) = M
(t) = M (t)+M
(t)+M
It=  (
( )(t)-ωz(t))2dt , которое поступает на пятый выход блока 41 выбора коэффициентов, которое по вычисленному значению функционала запоминается в блоке 42 памяти. Если оно оказалось меньше предыдущего значения, сравнивается с наименьшим значением из всех предыдущих значений It и если "новое" значение It окажется меньше, то по сигналу от блока 43 коммутатор соединяет текущие коэффициенты с входом блока 45 памяти, которое заменит коэффициенты на "лучшие".
)(t)-ωz(t))2dt , которое поступает на пятый выход блока 41 выбора коэффициентов, которое по вычисленному значению функционала запоминается в блоке 42 памяти. Если оно оказалось меньше предыдущего значения, сравнивается с наименьшим значением из всех предыдущих значений It и если "новое" значение It окажется меньше, то по сигналу от блока 43 коммутатор соединяет текущие коэффициенты с входом блока 45 памяти, которое заменит коэффициенты на "лучшие".
Для нормальной работы устройства выбора коэффициентов в начале полного цикла работы устройства на второй вход блока памяти поступает максимально допустимое значение функционала It.
В результате на первом, втором и третьем выходах блока памяти формируются оценки коэффициентов углового движения, соответствующие минимуму временного функционала, а на выходе блока 42 памяти формируется значение самого функционала.
Таким образом, за счет того, что удалось избежать операции численного дифференцирования и выбора наиболее информативных точек в частотной области, точность определения коэффициентов углового движения повышается в 5-6 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС САМОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570339C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2025413C1 |
| СИСТЕМА НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ ПОДЪЕМНОЙ СИЛОЙ САМОЛЕТА | 1991 |
|
RU2009963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| Следящая система автоматического управления нестационарным динамическим объектом | 2018 |
|
RU2692204C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ | 2014 |
|
RU2579551C1 |

Изобретение относится к авиационным приборам, а именно к устройствам для определения аэродинамических коэффициентов летательных аппаратов. Целью изобретения является повышение точности определения коэффициентов углового движения самолета. В устройство введены блок интегрального преобразования параметров полета, блок определения временного функционала и выборки коэффициентов углового движения. 4 з.п.ф-лы, 4 ил.
