Изобретение относится к авиационной технике, а именно к способам и устройствам определения центра масс летательного аппарата (ЛА) в полете.
В настоящее время вес самолета на земле определяется в его незагруженном состоянии с помощью механических или электротензометрических весов, установленных в специальных помещениях. Центровку, соответствующую этому состоянию самолета, а также различным вариантам загрузки, находят путем расчета аналитическим или графическим методом.
Известен способ определения веса и положения центра тяжести самолета (патент RU 2319115 C1, МПК G01G 19/07, опубл. 10.03.2008), осуществляемый автоматически на борту самолета перед его загрузкой и после загрузки в процессе руления по аэродрому.
Способ включает установку датчиков давления на цилиндр каждой амортизационной опоры шасси, измерение изменяющегося давления газа в полости цилиндров в процессе руления самолета по неровностям аэродрома. Вычисление давления газа производится на основе усреднения изменений давления газа в цилиндрах амортизационных опор шасси, силы, действующей на каждую опору шасси, веса и положения центра тяжести самолета.
К недостаткам известного способа можно отнести:
- необходимость установки на стойках шасси самолета дополнительных механизмов и датчиков, измеряющих давление, что может привести к снижению надежности авиационной техники;
- ступенчатое сжатие стойки самолета из-за трений в цилиндрах амортизации и на шарнирах крепления стойки шасси, что приводит к неправильной работе автоматики центровки;
- отсутствие возможности определения точки нахождения центра тяжести в полете, местоположение которой может меняться в процессе выработки топлива, сброса груза, дозаправки и т.д., что приводит к снижению устойчивости автоматического управления полетом самолета.
Известны также способ и устройство для определения величины и направления смещения центра масс аппарата, описанные в патенте RU 2176810 C2, МПК G05B 23/00, опубл. 10.12.2001, принятые нами в качестве прототипов.
Сущность способа и устройства состоит в определении полетной взаимосвязи приращения абсолютного линейного ускорения аппарата в его произвольной точке по отношению к ускорению его центра масс с величиной и направлением смещения центра масс от этой точки в процессе движения.
Данный способ основан на измерении параметров полета аппарата и включает в себя, в частности, измерение текущих углов тангажа и крена, кажущегося линейного ускорения, угловой скорости аппарата относительно его центра масс, дополнительного измерения абсолютного ускорения в произвольной точке, ускорения силы тяжести и, на основании полученной совокупности данных, определение величины и направления смещения центра масс.
Устройство, реализующее данный способ, содержит, в частности, датчики углов крена и тангажа, датчик угловых скоростей, акселерометр, блок определения составляющих ускорения силы тяжести, блок текущих координат центра масс, сумматор и два селектора частоты, причем согласно описанию изобретения, измерения угловых скоростей, угла тангажа, координаты местоположения, ускорения точки установки акселерометров и ускорения силы тяжести, могут быть осуществлены при помощи бортовой инерциальной системы навигации (БИНС).
Недостатками данного способа и устройства являются:
- низкая точность определения координат центра масс из-за очень слабой наблюдаемости полезных сигналов для определения центра масс ЛА;
- наличие неучтенной погрешности, вызванной несовпадением центра масс с точкой установки БИНС;
- необходимость большого объема сложных вычислений и фильтраций, что усложняет способ и устройство для его реализации.
Задачей настоящего изобретения является упрощение и удешевление способа и устройства, а также повышение точности измерения координат центра масс ЛА, что повышает безопасность полетов, особенно за счет оперативности определения центровки при изменении веса груженого самолета непосредственно в полете.
Согласно заявляемому способу определения координат центра масс летательного аппарата, основанному на измерении параметров полета аппарата и включающему в себя измерение кажущегося линейного ускорения, угловой скорости аппарата относительно его центра масс, использование значения ускорения силы тяжести, вычисленного в реальном масштабе времени, использовании значений углов крена и тангажа, и на основании полученной совокупности данных, определение координат центра масс, первоначально дополнительно измеряют величины угла атаки, угла скольжения, скорости летательного аппарата, углы тангажа и крена, а в дальнейшем производят измерение только угловой скорости, посредством трехосевого блока датчиков угловой скорости, и кажущихся ускорений вдоль связанных осей, посредством трехосевого блока акселерометров, причем координаты установки датчиков на борту являются известными, и на основе измеренных величин рекуррентным способом определяют величины угла атаки, угла скольжения, скорости летательного аппарата, углы тангажа и крена, кроме того, определяют динамические погрешности измерения перегрузок, обусловленные отклонением центра масс от точки установки датчиков перегрузок, используя разности первоначально определенных значений оцениваемых величин и значений этих величин с учетом динамических погрешностей измерения перегрузок, а также используя статистические характеристики погрешностей и шумов акселерометров и датчиков угловых скоростей, определяют функционал, а затем путем его минимизации при выполнении маневра типа «змейка» определяют координаты центра масс летательного аппарата.
Предлагаемый способ использует известные координаты положения датчиков перегрузок относительно строительных осей и уравнения движения самолета как твердого тела, а также выражения для динамических погрешностей изменения перегрузок, обусловленных отклонением центра масс от точки установки датчиков перегрузок. Способ является примером реализации системного подхода к решению поставленной задачи, при этом решение получается путем использования взаимосвязи между параметрами полета, определяемыми уравнениями пространственного движения летательного аппарата (ЛА), причем определение координат центра масс производят при выполнении маневра типа «змейка».
Для реализации данного способа в устройство определения координат центра масс летательного аппарата, включающее трехосевой блок датчиков угловых скоростей, трехосевой блок акселерометров, сумматор, дополнительно введены дифференцирующее устройство, блок определения поправок к перегрузкам, два интегратора, второй и третий сумматоры, последовательно соединенные блок формирования функционала и блок обработки функционала, причем первый, второй и третий выходы блока датчиков угловой скорости подключены соответственно ко второму, третьему и четвертому входам первого интегратора, первый вход которого является входом для сигналов, соответствующих начальным условиям, к первому, второму и третьему входам дифференцирующего устройства и к первому, второму и третьему входам блока определения поправок к перегрузкам, к четвертому, пятому и шестому входам которого подключены соответствующие выходы дифференцирующего устройства, первый, второй и третий выходы блока определения поправок к перегрузкам подключены к первым входам соответственно первого, второго и третьего сумматоров, ко вторым входам которых подключены соответственно первый второй и третий выходы блока акселерометров, соединенные также с пятым, шестым и седьмым входами первого интегратора соответственно, первый выход которого подключен к первому входу блока формирования функционала, второй выход подключен к первому входу второго интегратора, ко второму, третьему и четвертому входам которого подключены выходы соответственно первого, второго и третьего сумматоров, а выход второго интегратора подключен ко второму входу блока формирования функционала, третий вход которого является входом для сигналов, соответствующих статистическим характеристикам погрешностей и шумов акселерометров и датчиков угловых скоростей, первый, второй и третий выходы блока обработки функционала подключены соответственно к седьмому, восьмому и девятому входам блока определения поправок к перегрузкам и являются выходами устройства.
Сущность способа определения координат центра масс самолета состоит в нахождении взаимосвязи приращения абсолютного линейного ускорения аппарата в его произвольной точке, по отношению к ускорению его центра масс в процессе маневра ЛА. Для этого первоначально измеряют величины угла атаки, угла скольжения и скорости, а также углы крена и тангажа. Далее измеряемыми величинами являются только угловые скорости, измеренные при помощи трехосевого датчика угловых скоростей, и кажущиеся ускорения вдоль связанных осей, измеренные трехосевым акселерометром, с известными координатами установки на борту. На следующем шаге определяют ошибки измерения ускорения из-за смещения центра масс и снова определяют величины угла атаки, угла скольжения и скорости, а также углы крена и тангажа. Сравнивая эти величины, определенные по сигналам датчиков без поправки, с результатами вычислений, находим критерий для минимизации. Решая численную задачу по минимизации заданного функционала итеративным способом, находим искомые координаты центра масс ЛА. Поставленная техническая задача решается следующим образом.
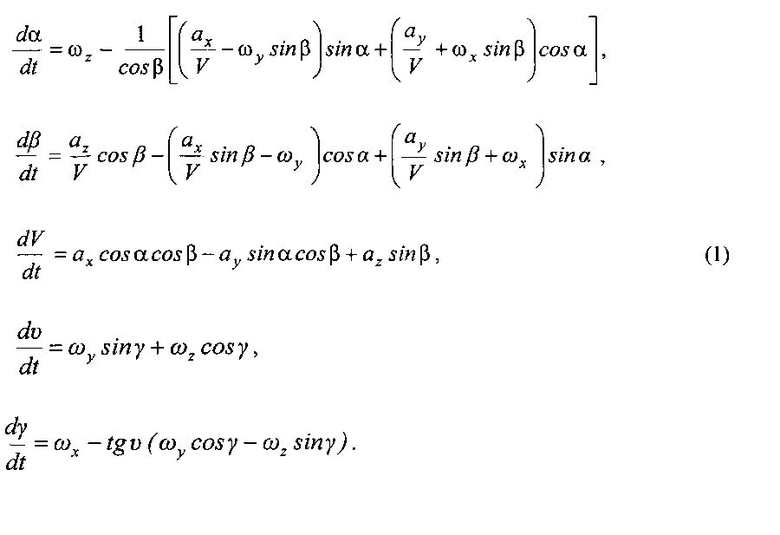
Приведем уравнения, используемые при решении поставленной задачи
где α, β - углы атаки и скольжения, рад;
ωx, ωy, ωz - угловые скорости относительно связанных осей, рад/с;
υ, γ - углы тангажа, крена, рад;
V - истинная воздушная скорость, м/с;
а х, а у, a z - ускорения вдоль связанных осей, определяемые формулами:

где nх, ny, nz - перегрузки вдоль связанных осей,
g - ускорение силы тяжести.
Главная особенность этих уравнений заключается в том, что они не зависят от аэродинамических коэффициентов самолета. При точном совпадении местоположения датчиков перегрузок с центром масс, правые части уравнений (1), (2) можно вычислить через измеряемые в полете значения перегрузок и угловых скоростей.
Однако при перемещении центра масс на датчики перегрузок начинают действовать силы, обусловленные появлением смещений x0, γ0, z0 - координат датчиков в связанной системе с началом координат в центре масс самолета. Причиной являются составляющие центростремительного и тангенциального ускорения.
Поправки к измерениям перегрузок вычисляются с использованием следующих выражений:
где x0, y0, z0 - координаты датчиков в связанной системе с началом координат в центре масс самолета. Производные угловых скоростей, с одновременным сглаживанием полученных значений, находятся численно по формулам, представленным ниже. С точки зрения уменьшения влияния шумов хорошие результаты дает формула, в которой применяется полиноминальное сглаживание на скользящем интервале
Оценки производной, вычисленные по этой формуле, обладают свойствами несмещенности и минимальной дисперсии.
При использовании сглаживающего полинома четвертого порядка коэффициенты вычисляются следующим образом:

где h=ti+1 - интервал дискретизации,
m=5 - количество итераций.
При вычислении скорректированных значений перегрузок nх, ny, nz поправки (3) прибавляются к измеренным значениям, то есть

Уравнения (1)-(5) в векторной форме имеют вид

где y(t), u(t) - векторы выходных и входных сигналов,
а - вектор значений идентифицируемых параметров.
В данном случае вектор y(t) состоит из сигналов α(t), β(t), V(t), υ(t), γ(t).
В вектор входных сигналов входят измеренные в полете значения угловых скоростей ωx, ωy, ωz и перегрузок nx, ny, nz.
Начальные условия y(t0) задаются по результатам измерений параметров α(t), β(t), V(t), υ(t), γ(t).
Система дифференциальных уравнений (1) с учетом соотношений (2)-(4) позволяет получить оценки координат установки датчиков относительно центра масс при помощи параметрической идентификации. Для этого необходимо сформировать вектор параметров, подлежащих оцениванию. В общем случае, кроме координат датчика перегрузки х0, y0, z0, следует включить в число искомых параметров постоянные составляющие погрешностей измерений входных сигналов ωx, ωy, ωz и nx, ny, nz.
Тогда вектор оцениваемых параметров принимает вид:

где  ,
,  ,
,  ,
,  ,
,  ,
,  - систематические погрешности соответствующих индексу датчиков.
- систематические погрешности соответствующих индексу датчиков.
В зависимости от конкретных особенностей ЛА и его системы измерений, число оцениваемых параметров можно уменьшить.
Например, в ходе наземных работ можно оценить постоянные систематические погрешности датчиков.
Тогда получим:

Очевидно, что вариант (8) предпочтительнее.
Поскольку точное место установки датчиков на борту ЛА известно и не изменяется во время полета, координаты датчиков относительно центра масс однозначно определяют фактическое положение центра масс.
Для нахождения оценок параметров применяются алгоритмы параметрической идентификации.
Уравнение наблюдений в векторной форме имеет вид

где η(ti) - шум наблюдений, представляющий собой векторную нормальную случайную последовательность типа белого шума с нулевым математическим ожиданием и постоянной дисперсионной матрицей R. В вектор наблюдений включаются сигналы, производные которых стоят в левой части (1):

Функционал принимает вид

где  , - выходной сигнал модели объекта (1)-(4); N - число измерений на участке обработки.
, - выходной сигнал модели объекта (1)-(4); N - число измерений на участке обработки.
Для поиска значений параметров, минимизирующих функционал (11), можно применить алгоритм численной оптимизации. Для обработки в реальном масштабе времени следует применить метод Ньютона, так как результат при этом получается после заранее известного числа операций, то есть время поиска задано заранее. Оценки вектора параметров  вычисляются по рекуррентной формуле:
вычисляются по рекуррентной формуле:
где:


При реализации алгоритма производные оценок прогноза определяются численно для моментов времени ti,  по формулам:
по формулам:
где еj - вектор размерности p, все элементы которого равны нулю за исключением j-го элемента, который равен 1; ε - малое число, обычно задаваемое на уровне 0,001…0,1% от номинального значения параметров.
Оценки  , определяются численным решением уравнений объекта и наблюдений при η(ti)=0. Окончание идентификации обычно осуществляется по условию
, определяются численным решением уравнений объекта и наблюдений при η(ti)=0. Окончание идентификации обычно осуществляется по условию  , где δ=0,005…0,02, при этом алгоритм сходится к решению за 4…6 шагов. При обработке в реальном масштабе времени целесообразно жестко задать число шагов, например, пять, чтобы зафиксировать число операций, то есть время работы алгоритма.
, где δ=0,005…0,02, при этом алгоритм сходится к решению за 4…6 шагов. При обработке в реальном масштабе времени целесообразно жестко задать число шагов, например, пять, чтобы зафиксировать число операций, то есть время работы алгоритма.
Таким образом, при наличии начальных значений параметров полета a(t), β (t), V(t), υ(t), γ(t) и характеристик шумов и погрешностей датчиков угловых скоростей и перегрузок предложенный способ позволяет определить координаты центра масс самолета x0, y0, z0 в процессе выполнения маневра типа «змейка».
На чертеже представлена структурная схема заявляемого устройства для определения координат центра масс летательного аппарата, реализующего данный способ.
Устройство содержит трехосевой блок 1 датчиков угловых скоростей, дифференцирующее устройство 2, блок 3 определения поправок к перегрузкам, первый интегратор 4, блок акселерометров 5, три сумматора 6, 7, 8, второй интегратор 9, блок 10 формирования функционала и блок 11 обработки функционала. Первый, второй и третий выходы блока 1 датчиков угловой скорости подключены соответственно ко второму, третьему и четвертому входам первого интегратора 4, первый вход которого является входом для сигналов, соответствующих начальным условиям, к первому, второму и третьему входам дифференцирующего устройства 2 и к первому, второму и третьему входам блока 3 определения поправок к перегрузкам. К четвертому, пятому и шестому входам блока 3 подключены соответствующие выходы дифференцирующего устройства 2. Первый, второй и третий выходы блока 3 определения поправок к перегрузкам подключены к первым входам соответственно первого 6, второго 7 и третьего 8 сумматоров. Ко вторым входам сумматоров подключены соответственно первый второй и третий выходы блока 5 акселерометров, соединенные также с пятым, шестым и седьмым входами первого интегратора 4 соответственно. Первый выход интегратора 4 подключен к первому входу блока 10 формирования функционала, второй выход подключен к первому входу второго интегратора 9. Ко второму, третьему и четвертому входам интегратора 9 подключены выходы соответственно первого 6, второго 7 и третьего 8 сумматоров. Выход интегратора 9 подключен ко второму входу блока 10 формирования функционала, третий вход которого является входом для сигналов, соответствующих статистическим характеристикам погрешностей и шумов акселерометров и датчиков угловых скоростей. Первый, второй и третий выходы блока 11 обработки функционала подключены соответственно к седьмому, восьмому и девятому входам блока 3 определения поправок к перегрузкам и являются выходами устройства.
Устройство работает следующим образом.
Трехосевой блок 1 датчиков угловых скоростей выдает сигналы, пропорциональные угловым скоростям ωx, ωy, ωz, которые поступают в дифференцирующее устройство 2, блок 3 определения поправок к перегрузкам и в первый интегратор 4.
Дифференцирующее устройство 2 выполняет функцию дифференцирования и сглаживания сигналов угловых скоростей, согласно формулам (4):


В результате на выходе дифференцирующего устройства 2 получаем сигналы, пропорциональные ωx, ωy, ωZ, которые поступают на вход блока 3 определения поправок к перегрузкам, где определяются ошибки измерения перегрузок, обусловленные смещением центра масс, согласно выражениям (3):



где x0, y0, z0 - координаты датчиков в связанной системе с началом координат в центре масс самолета.
Сигналы, соответствующие поправкам Δnx, Δny, Δnz, поступают, соответственно на первые входы сумматоров 6, 7, 8. На вторые входы сумматоров поступают соответственно сигналы nх, ny, nz, измеренные трехосевым акселерометром 5.
Первый интегратор 4, на вход которого подаются Начальные условия интегрируемых параметров zT(t)=[α(t0), β(t0), V(t0), υ(t0), y(t0)], измеренные значения угловых скоростей с трехосевого блока 1 датчиков угловых скоростей и значения перегрузок nx, ny, nz, измеренные трехосевым акселерометром 5. В интеграторе 4 решаются уравнения, приведенные в (1)
Выходные сигналы, пропорциональные значениям zT(t)=[α(t), β(t), V(t), υ(t), γ(t)], поступают на второй вход блока 10 формирования функционала и на первый вход второго интегратора 9, на второй, третий и четвертый входы которого поступают сигналы с сумматоров 6, 7, и 8, соответствующие перегрузкам с учетом поправок Δnx, Δny, Δnz. Выходные сигналы с интегратора 9, пропорциональные оцененным величинам  , поступают на второй вход блока 10 формирования функционала. Блок 10 формирует функционал по полученным сигналам из первого 4 и второго 9 интеграторов и по сигналам, соответствующим статистическим характеристикам погрешностей и шумов акселерометров и датчиков угловых скоростей, поступающим на третий вход блока 10 формирования функционала в виде матрицы R.
, поступают на второй вход блока 10 формирования функционала. Блок 10 формирует функционал по полученным сигналам из первого 4 и второго 9 интеграторов и по сигналам, соответствующим статистическим характеристикам погрешностей и шумов акселерометров и датчиков угловых скоростей, поступающим на третий вход блока 10 формирования функционала в виде матрицы R.
Функционал имеет вид:

Полученный сигнал, соответствующий значению функционала, поступает на вход блока 11 обработки функционала, где определяются искомые значения координат центра масс самолета а T=[x0y0z0], которые являются проекциями смещения центра масс на связанные с ЛА оси, согласно выражениям (12), (13), (14), (15)
Таким образом, только по сигналам, пропорциональным значениям угловых скоростей с трехосевого блока 1 датчиков угловых скоростей и перегрузок nx, ny, nz, измеренных трехосевым блоком 5 акселерометром, предложенное устройство позволяет определить проекции смещения центра масс самолета в полете на связанные оси, которые являются значениями координат центра масс самолета.
Реализация способа может быть осуществлена с помощью устройства, описанного выше, в котором в качестве акселерометров могут быть использованы как микромеханические датчики (для ЛА интенсивного маневрирования), так и высокоточные датчики (для маломаневренных ЛА). В качестве входных сигналов устройства могут быть использованы выходные сигналы бортовых навигационных комплексов или курсовертикали, а вычислительная часть устройства может быть выполнена на стандартных элементах вычислительной техники.
Таким образом, заявленные способ и устройство просты в реализации и применении, обладают достаточно высокой точностью и могут быть использованы на всех типах ЛА для определения координат местоположения центра масс ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС БЕСПИЛОТНОГО ВЕРТОЛЕТА | 2021 |
|
RU2767969C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДОВАНИЯ РЕСУРСА И СПЕКТРА НАГРУЗОК ОСНОВНЫХ ЭЛЕМЕНТОВ ПЛАНЕРА МАНЕВРЕННЫХ САМОЛЕТОВ | 2011 |
|
RU2473959C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| Способ определения центра масс летательного аппарата и устройство для его осуществления | 2016 |
|
RU2645018C1 |
Заявляемое изобретение относится к авиационной технике, а именно к способам и устройствам определения центра масс летательного аппарата (ЛА) в полете. Способ основан на измерении параметров полета летательного аппарата. Сущность способа определения координат центра масс самолета состоит в нахождении взаимосвязи приращения абсолютного линейного ускорения аппарата в его произвольной точке по отношению к ускорению его центра масс в процессе маневра ЛА. Для этого первоначально измеряют величины угла атаки, угла скольжения и скорости, а также углы крена и тангажа. Далее измеряемыми величинами являются только угловые скорости, измеренные при помощи трехосевого блока датчиков угловых скоростей, и кажущиеся ускорения вдоль связанных осей, измеренные трехосевым блоком акселерометров, причем координаты установки датчиков на борту являются известными. На следующем шаге определяют ошибки измерения ускорения из-за смещения центра масс и снова определяют величины угла атаки, угла скольжения и скорости, а также углы крена и тангажа. Сравнивая эти величины, определенные по сигналам датчиков без поправки, с результатами вычислений, находят критерий для минимизации. Решая численную задачу по минимизации заданного функционала итеративным способом, находят искомые координаты центра масс ЛА. Причем определение координат центра масс самолета осуществляют при выполнении маневра типа «змейка». Данные способ и устройство просты в реализации и применении, обладают достаточно высокой точностью и могут быть использованы во всех типах ЛА для определения координат местоположения центра масс ЛА.
Технический результат - упрощение и удешевление способа и устройства, также повышение точности измерения координат центра масс ЛА. 2 н.п. ф-лы, 1 ил.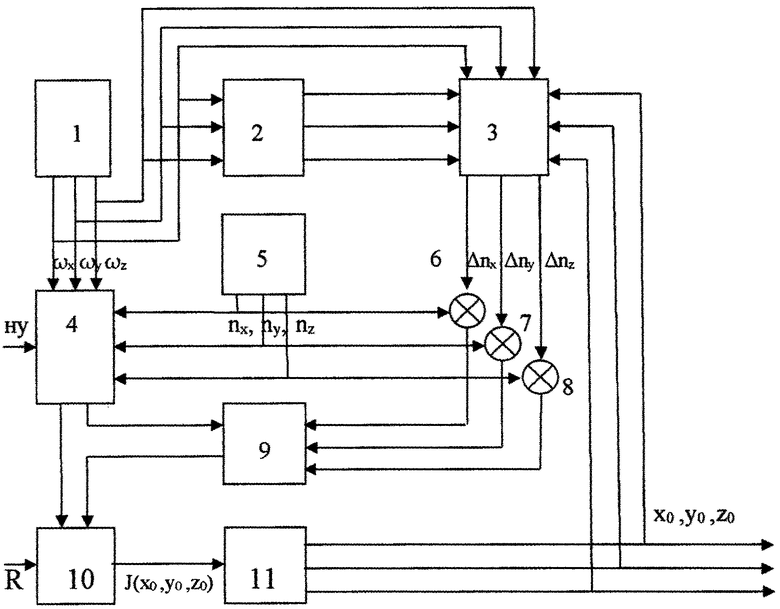
1. Способ определения координат центра масс летательного аппарата, основанный на измерении параметров полета аппарата и включающий в себя измерение кажущегося линейного ускорения, угловой скорости аппарата относительно его центра масс, использование значения ускорения силы тяжести, вычисленного в реальном масштабе времени, использовании значений углов крена и тангажа, и на основании полученной совокупности данных, определение координат центра масс, отличающийся тем, что первоначально дополнительно измеряют величины угла атаки, угла скольжения, скорости летательного аппарата, углы тангажа и крена, а в дальнейшем производят измерение только угловой скорости, посредством трехосевого блока датчиков угловой скорости, и кажущихся ускорений вдоль связанных осей, посредством трехосевого блока акселерометров, причем координаты установки датчиков на борту являются известными, и на основе измеренных величин рекуррентным способом определяют величины угла атаки, угла скольжения, скорости летательного аппарата, углы тангажа и крена, кроме того, определяют динамические погрешности измерения перегрузок, обусловленные отклонением центра масс от точки установки датчиков перегрузок, используя разности первоначально определенных значений оцениваемых величин и значений этих величин с учетом динамических погрешностей измерения перегрузок, а также используя статистические характеристики погрешностей и шумов акселерометров и датчиков угловых скоростей, определяют функционал, а затем путем его минимизации при выполнении маневра типа "змейка" определяют координаты центра масс летательного аппарата.
2. Устройство определения координат центра масс летательного аппарата, включающее трехосевой блок датчиков угловых скоростей, трехосевой блок акселерометров, сумматор, отличающееся тем, что в него дополнительно введены дифференцирующее устройство, блок определения поправок к перегрузкам, два интегратора, второй и третий сумматоры, последовательно соединенные блок формирования функционала и блок обработки функционала, причем первый, второй и третий выходы блока датчиков угловой скорости подключены соответственно ко второму, третьему и четвертому входам первого интегратора, первый вход которого является входом для сигналов, соответствующих начальным условиям, к первому, второму и третьему входам дифференцирующего устройства и к первому, второму и третьему входам блока определения поправок к перегрузкам, к четвертому, пятому и шестому входам которого подключены соответствующие выходы дифференцирующего устройства, первый, второй и третий выходы блока определения поправок к перегрузкам подключены к первым входам соответственно первого, второго и третьего сумматоров, ко вторым входам которых подключены соответственно первый второй и третий выходы блока акселерометров, соединенные также с пятым, шестым и седьмым входами первого интегратора соответственно, первый выход которого подключен к первому входу блока формирования функционала, второй выход подключен к первому входу второго интегратора, ко второму, третьему и четвертому входам которого подключены выходы соответственно первого, второго и третьего сумматоров, а выход второго интегратора подключен ко второму входу блока формирования функционала, третий вход которого является входом для сигналов, соответствующих статистическим характеристикам погрешностей и шумов акселерометров и датчиков угловых скоростей, первый, второй и третий выходы блока обработки функционала подключены соответственно к седьмому, восьмому и девятому входам блока определения поправок к перегрузкам и являются выходами устройства.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ ЕГО УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ПРИВОДОВ | 1997 |
|
RU2114031C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |

