Изобретение относится к радиолокации и может быть использовано в каналах углового сопровождения цели РЛС и координаторах ракет.
Известно устройство для измерения угловых координат цели, содержащее антенну, выход которой соединен с первым входом смесителя, второй вход которого соединен с выходом гетеродина, а выход через усилитель промежуточной частоты и амплитудный детектор - с первым входом селектора дальности, второй вход которого соединен с выходом дальномера, а выход через расширитель импульса и детектор сигнала ошибки - с первыми входами фазовых детекторов, вторые входы которых соединены с выходами генератора опорных напряжений, вход которого соединен с выходом двигателя вращения луча, механически соединенного с облучателем антенны, выходы фазовых детекторов соединены через усилители сигналов управления с входами двигателей управления, механически соединенных с антенной.
Недостатком устройства является низкая помехозащищенность, обусловленная влиянием амплитудно-модулированных помех на частоте сканирования, а также недостаточная дальность измерения координат цели и низкая точность измерения на малой дальности.
Наиболее близким к изобретению является радиолокационный координатор цели, содержащий канал угла места антенны, канал азимута антенны и канал опорного сигнала. Канал угла места антенны имеет первый и второй облучатели антенны, первое вычитающее устройство, первый смеситель, первый усилитель промежуточной частоты, первый фазовый детектор, первый усилитель мощности и первый следящий привод антенны. Канал азимута антенны имеет третий и четвертый облучатели антенны, второе вычитающее устройство, второй смеситель, второй умножитель промежуточной частоты, второй фазовый детектор, второй усилитель мощности и второй следящий привод антенны. Канал опорного сигнала имеет суммирующее устройство, третий смеситель, третий усилитель промежуточной частоты, схему автоматической регулировки усилителя и гетеродин, причем входы суммирующего устройства связаны с первым, вторым, третьим и четвертым облучателями антенны, а его выход - с первым входом третьего смесителя, входы первого и второго вычитающих устройств связаны соответственно с первым и вторым, третьим и четвертым облучателями антенны, а их выходы - с первыми входами первого и второго смесителей, вторые входы которых и второй вход третьего смесителя соединены с выходом гетеродина, выходы первого, второго и третьего смесителей связаны соответственно с первыми входами первого, второго и третьего усилителей промежуточной частоты, вторые входы которых соединены с выходом схемы автоматической регулировки усиления, выходы первого и второго усилителей промежуточной частоты соединены соответственно с первыми входами первого и второго фазовых детекторов. Выход третьего усилителя промежуточной частоты соединен с входом схемы автоматической регулировки усиления и вторыми входами первого и второго фазовых детекторов, выходы которых через первый и второй усилители мощности соединены с входами первого и второго следящих приводов антенны.
Недостатками данного устройства являются небольшая дальность измерения угловых координат цели и низкая точность измерения на малых дальностях, обусловленные тем, что недостаточно используются возможности антенны по усилению суммарной диаграммой направленности к крутизне разностной диаграммы направленности к крутизне разностной диаграммы направленности.
Предлагаемое устройство позволяет увеличить дальность измерения угловых координат цели за счет увеличения коэффициента усиления диаграммы направленности антенны, которое достигается путем осесимметричного перемещения облучателей антенны в зависимости от уровня принимаемого сигнала, что приводит к увеличению крутизны пеленгационной характеристики на малых дальностях, т.е. повышению точности измерения угловых координат цели.
Устройство для измерения угловых координат цели, содержащее канал угла места антенны, канал азимута антенны и канал опорного сигнала, канал угла места антенны имеет первый и второй облучатели антенны, первое вычитающее устройство, первый смеситель, первый усилитель промежуточной частоты, первый фазовый детектор, первый усилитель мощности и первый следящий привод антенны, канал азимута антенны имеет третий и четвертый облучатели, антенны, второе вычитающее устройство, второй смеситель, второй усилитель промежуточной частоты, второй фазовый детектор, второй усилитель мощности и второй следящий привод антенны, канал опорного сигнала имеет суммирующее устройство, третий смеситель, третий усилитель промежуточной частоты, схему автоматической регулировки усиления и гетеродин, причем входы суммирующего устройства связаны с первым, вторым, третьим и четвертым облучателями антенны, а его выход - с первым входом третьего смесителя, входы первого и второго вычитающих устройств соединены соответственно с первым и вторым, третьим и четвертым облучателями антенны, а их выходы - с первыми входами первого и второго смесителей, вторые входы которых и второй вход третьего смесителя соединены с выходом гетеродина, выходы первого, второго и третьего смесителей соединены соответственно с первыми входами первого, второго и третьего усилителей промежуточной частоты, вторые входы которых соединены с выходом схемы автоматической регулировки усиления, выходы первого и второго усилителей промежуточной частоты соединены соответственно с первыми входами первого и второго фазовых детекторов, выход третьего усилителя промежуточной частоты соединен с входом схемы автоматической регулировки усиления и вторыми входами первого и второго фазовых детекторов, выходы которых соответственно через первый и второй усилители мощности соединены с входами первого и второго следящих приводов антенны, дополнительно введен канал перемещения облучателей антенны, содержащий четвертый усилитель промежуточной частоты, первый амплитудный детектор, схему сравнения, третий усилитель мощности и привод облучателей антенны, причем вход четвертого усилителя промежуточной частоты соединен с выходом третьего смесителя, а выход через первый амплитудный детектор - с первым входом схемы сравнения, второй вход которой соединен с вторым выходом схемы автоматической регулировки усиления, а выход через третий усилитель мощности - с входом привода облучателей антенны, первый, второй, третий и четвертый облучатели антенны выполнены подвижными и через механизм перемещения облучателей механически связаны с приводом облучателей антенны.
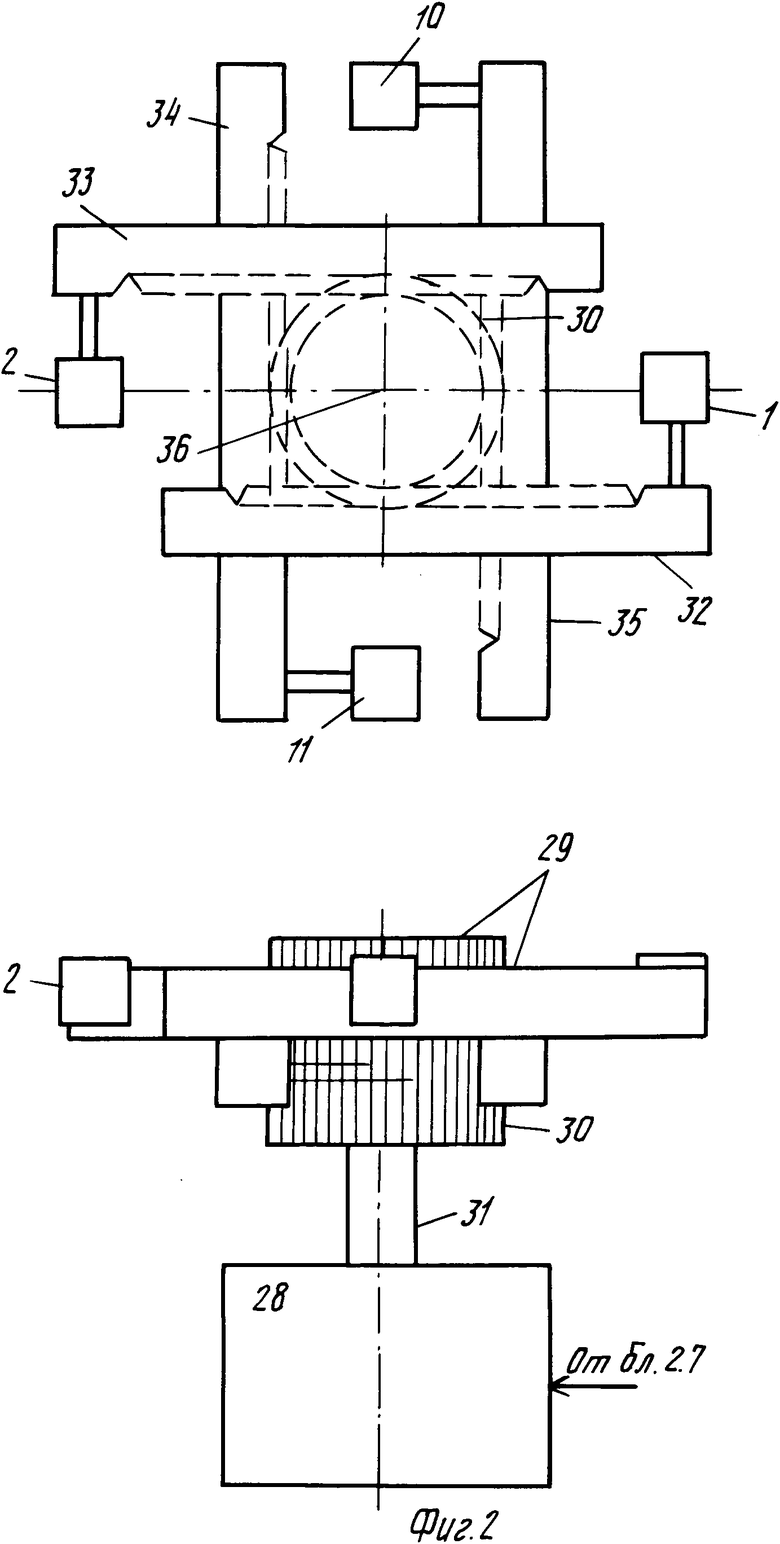
Кроме того, устройство для измерения угловых координат цели отличается тем, что механизм перемещения облучателей выполнен в виде зубчатой реечной передачи, имеющей приводное зубчатое колесо, закрепленное на оси привода облучателей антенны, с которым одним концом введены в зацепление четыре зубчатые рейки, на других концах которых жестко закреплены первый, второй, третий и четвертый облучатели антенны с возможностью их одновременного перемещения относительно фазового центра антенны, причем первый и второй облучатели - в вертикальной, а третий и четвертый - в горизонтальной плоскостях.
Применение предлагаемого устройства позволяет увеличить дальность измерения угловых координат цели и повысить точность измерения угловых координат на малых дальностях за счет изменения характеристик системы в зависимости от величины суммарного сигнала, отраженного от цели путем симметричного с одинаковой скоростью перемещения облучателей антенны одновременно в обеих плоскостях с введением в устройство канала перемещения облучателей антенны.
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - структурная схема механизма перемещения облучателей; на фиг. 3 - структурная схема автоматической регулировки усиления; на фиг. 4 - показывающий зависимость коэффициента усиления и крутизны разностной диаграммы направленности от угла смещения облучателей (А - суммарный сигнал, Б - крутизна разностной диаграммы направленности, В - произведения суммарного сигнала на крутизну разностной диаграммы направленности).
Устройство для измерения угловых координат цели (фиг. 1) содержит канал угла места антенны, канал азимута антенны, канал опорного сигнала, канал излучателей антенны. Канал угла места антенны имеет первый 1 и второй 2 излучатели антенны 3, первое вычитающее устройство 4, первый смеситель 5, первый усилитель 6 промежуточной частоты, первый фазовый детектор 7, первый усилитель 8 мощности и следящий привод 9.
Канал азимута антенны имеет третий 10 и четвертый 11 облучатели антенны, второе вычитающее устройство 12, второй смеситель 13, второй усилитель 14 промежуточной частоты, второй фазовый детектор 15, второй усилитель 16 мощности и следящий привод 17 канала азимута антенны.
Канал опорного сигнала имеет суммирующее устройство 18, третий смеситель 19, третий усилитель 20 промежуточной частоты, схему 21 автоматической регулировки усиления и гетеродин 22. Причем входы суммирующего устройства 18 связаны с первым 1, вторым 2, третьим 10 и четвертым 11 облучателями антенны, а его выход - с первым входом третьего смесителя 19. Входы первого 4 и второго 12 вычитающих устройств соединены соответственно с первым 1 и вторым 2, третьим 10 и четвертым 11 облучателями антенны, их выходы - с первыми входами первого 5 и второго 13 смесителей, вторые входы которых и второй вход третьего смесителя 19 соединены с выходом гетеродина 22, выхода первого 5, второго 13 и третьего 19 смесителей соединены соответственно с первыми входами первого 6, второго 14 и третьего 20 усилителей промежуточной частоты, вторые входы которых соединены с выходом схемы 21 автоматической регулировки усиления. Выходы первого 6 и второго 14 усилителей промежуточной частоты соединены соответственно с первыми входами первого 7 и второго 15 фазовых детекторов, выход третьего усилителя 20 промежуточной частоты соединен с входами схемы 21 автоматической регулировки усиления и вторыми входами первого 7 и второго 15 фазовых детекторов, выходы которых соответственно через первый 8 и второй 16 усилители мощности соединены с входами первого 9 и второго 17 следящих приводов антенны.
Канал 23 перемещения облучателей антенны состоит из четвертого усилителя 24 промежуточной частоты, первого амплитудного детектора 25, схемы 26 сравнения, третьего усилителя 27 мощности и привода 28 облучателей антенны, причем вход четвертого усилителя 24 промежуточной частоты соединен с выходом третьего смесителя 19, а выход через первый амплитудный детектор 25 - с первым входом схемы 26 сравнения, второй вход которой соединен с вторым выходом схемы 21 автоматической регулировки усиления, а выход через третий усилитель 27 мощности - с входом привода 28 облучателей антенны.
Схема 21 автоматической регулировки усиления (см. фиг. 2) состоит из второго амплитудного детектора 29, фильтра 30 нижних частот и источника 31 напряжения задержки, причем выход источника 31 напряжения задержки соединен с вторым выходом схемы 21 автоматической регулировки усиления и первым входом второго амплитудного детектора 29, второй вход которого соединен с входом схемы 21 автоматической регулировки усиления, а выход - через фильтр 30 низких частот с первым выходом схемы 21 автоматической регулировки усиления. Механизм 29 перемещения облучателей выполнен в виде зубчатой реечной передачи, имеющее приводное зубчатое колесо 30, закрепленное на оси 31 привода облучателей антенны, с которым одним концом введены в зацепление четыре зубчатые рейки 32-35, на других концах которых жестко закреплены первый 1, второй 2, третий 10 и четвертый 11 облучатели антенны 3 с возможностью их одновременного перемещения относительно фазового центра 36 антенны, причем первый 1 и второй 2 облучатели - в вертикальной, а третий 10 и четвертый 11 - в горизонтальной плоскостях.
Устройство работает следующим образом.
Сигнал, отраженный от цели, принимается антенной 3, облучатели 1, 2 и 10, 11 которой образуют равносигнальное направление в двух взаимно перпендикулярных плоскостях. Симметричное с одинаковой скоростью смещение облучателей одновременно в обеих плоскостях относительно оси антенны приводит к изменению коэффициента усиления антенны в равносигнальном направлении и крутизны разностной диаграммы направленности (см. фиг. 4). Диапазон изменения углов смещения максимумов парциальных ДН выбран из условия неискажения каждой ДН. Коэффициент усиления антенны 3 в равносигнальном направлении определяет дальность измерения угловых координат цели, а крутизна разностной диаграммы направленности - точность измерения ее угловых координат. Максимумы коэффициента усиления антенны 3 и крутизна разностной диаграммы направленности получаются при различных углах смещения облучателей 1, 2, 10, 11. Изменяя в соответствии с величиной суммарного сигнала, отраженного от цели, угол смещения облучателей 1, 2, 10, 11 можно добиться увеличения дальности измерения угловых координат цели и повышения точности измерения на малых дальностях, когда отраженный сигнал от цели велик.
Увеличение дальности измерения координат происходит за счет увеличения коэффициента усиления суммарной диаграммы направленности антенны от величины 0,75 Gmax до величины 0,90 Gmax (Gmax - максимальный коэффициент усиления суммарной диаграммы направленности при угле смещения максимумов парциальных диаграмм, равном нулю, см. фиг. 4).
Выражение для дальности измерения координат радиолокационным устройством полуактивного типа определяется зависимостью
Dnmax=  , где Dn - дальность от передатчика до цели;
, где Dn - дальность от передатчика до цели;
Р - мощность передатчика;
σo - среднее значение эффективной отражающей поверхности цели;
Gк, Gn - коэффициенты усиления в максимуме основного лепестка диаграммы направленности антенн приемника и передатчика соответственно;
R - коэффициент различимости;
λ - длина волны;
Sм - мощность шумов;
Δ f - полоса пропускания приемника.
Увеличение дальности определим из выражения D
D =
=
Точность измерения угловых координат определяется выражением
σo=  , где μ - крутизна пеленгационной характеристики;
, где μ - крутизна пеленгационной характеристики;
q - отношение сигнал/шум.
На малых дальностях имеется возможность увеличить крутизну пеленгационной характеристики от величины 0,6 μmax до величины равной 0,75 μmax (см. фиг. 4).
Увеличение точности измерения угловых координат определим из выражения
Δσo=  -
-  = 0,33
= 0,33 
Таким образом, дальность измерения координат увеличивается на 0,1 максимальной дальности, а точность измерения угловых координат на 0,33 максимальной точности.
Сигналы всех облучателей 1, 2, 10, 11 суммируются в суммирующем устройстве 18 и после преобразования в третьем смесителе 19 и усиления в четвертом усилителе 24 промежуточной частоты детектируются первым амплитудным детектором 25 и поступают на первый вход схемы 26 сравнения, где сравниваются с постоянным сигналом с второго выхода схемы 21 автоматической регулировки усиления. На выходе схемы 26 сравнения формируется сигнал в соответствии с выражением И = И1 - И2, где И1 - сигнал с выхода первого амплитудного детектора 25, И2 - сигнал с второго выхода схемы 21 автоматической регулировки усиления.
Положительное значение сигнала с выхода схемы 26 сравнения воздействует на привод 28 облучателей антенны через третий усилитель 27 мощности так, что он увеличивает угол смещения облучателей.
Это приводит к уменьшению коэффициента усиления антенны в равносигнальном направлении и уменьшению сигнала на выходе первого амплитудного детектора 24 до величины, равной пороговому сигналу с второго выхода схемы 21 автоматической регулировки усиления.
Отрицательное значение сигнала с выхода схемы 26 сравнения, воздействуя через усилитель 27 мощности на привод 28 облучателей антенны, приводит к уменьшению угла смещения облучателей 1, 2, 10, 11.
Третий привод антенны (следящий привод 28 облучателей) имеет один выход, сигналом с которого управляются все четыре облучателя одновременно и симметрично с одинаковой скоростью перемещаются на один и тот же угол.
При этом искажений диаграммы направленности (ДН) не будет, т.к. максимальный угол смещения не превышает удвоенной ширины ДН по половинной мощности 3.
Учитывая, что предлагаемое техническое решение повышает точность измерения угловых координат только на малых дальностях, уменьшение коэффициента усиления не вызывает уменьшения величины суммарного сигнала вследствие роста мощности отраженного сигнала, вызванного уменьшением дальности.
Наличие схемы 26 сравнения приводит к тому, что изменение углового разноса облучателей происходит тогда, когда величина суммарного сигнала больше или меньше заданной на втором выходе блока 21. Если заданный уровень суммарного сигнала например В В., то изменение углового разноса облучателей происходит таким образом, чтобы суммарный сигнал на выходе блока 19 был равным 2 В. , т.е. изменение углового разноса облучателей происходит в ту или другую сторону до тех пор, пока на выходе блока 26 не будет нулевой сигнал. Таким образом, величина суммарного сигнала всегда поддерживается постоянной и ухудшения точности пеленгации не произойдет.
Оставляя постоянной величину суммарного сигнала при уменьшении дальности до цели, происходит увеличение крутизны разностной ДН, а это приводит к повышению точности измерения угловых координат.
Принцип действия каналов угла места и азимута антенны аналогичен, поэтому рассмотрим, например, работу канала угла места антенны.
При отклонении цели от равносигнального направления по углу места на выходе вычитающего устройства 4 формируется сигнал рассогласования, который преобразуется в первом смесителе 5, усиливается в первом усилителе 6 промежуточной частоты и поступает на первый вход первого фазового детектора 7, на второй вход которого поступает опорный сигнал с выхода третьего усилителя 20 промежуточной частоты. На выходе первого фазового детектора 7 формируется сигнал, пропорциональный угловому рассогласованию цели по углу места относительно равносигнального направления, который через первый усилитель 8 мощности воздействует на следящий привод 9 по углу места.
Следящий привод 9 по углу места перемещает антенну 3 до совмещения оси ее равносигнальной зоны с направлением на цель. Угловые координаты цели измеряются по положению антенны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ И РАДИОЛОКАЦИОННЫЙ КООРДИНАТОР ЦЕЛИ | 2007 |
|
RU2363962C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ И РАДИОЛОКАЦИОННЫЙ КООРДИНАТОР ЦЕЛИ | 2020 |
|
RU2753370C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ И РАДИОЛОКАЦИОННЫЙ КООРДИНАТОР ЦЕЛИ | 2007 |
|
RU2334994C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2317562C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2253825C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ПРОТЯЖЕННОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2360262C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2248896C1 |


Использование: в каналах углового сопровождения цепи РЛС и координаторах ракет. Сущность изобретения: устройство содержит четыре облучателя антенны 1, 2, 10, 11, антенну 3, два вычитающих блока 4, 12, смесители 5, 13, 19, четыре усилителя промежуточной частоты 6, 14, 20, 24, два фазовых детектора 7, 15, три усилителя мощности 8, 16, 27, два следящих привода антенны 9, 17, суммирующий блок 18, блок 21 автоматической регулировки усиления, гетеродин 22, канал 23 перемещения облучателей, амплитудный детектор 25, блок 26 сравнения, привод облучателей 28, что позволяет повысить дальность измерения угловых координат и точности измерения. 1-4-5-6-7-8-9-3, 2-4, 10-12-13-14-15-16-17-3, 11-12, 22-13, 1-18, 2-18, 10-18, 11-18, 14-20, 14-6, 22-19, 22-5, 21-26, 19-24-25-26-27-28-11, 28-10, 28-2, 28-1, 20-7, 20-15. 1 з. п.ф-лы, 4 ил.
| Системы управления и динамика полета ракет | |||
| Под ред.А.С | |||
| Пугачева | |||
| ВВИА им.Н.Е | |||
| Жуковского, 1965, с.86,142. |
