Известен доплеровский способ определения скорости движения судна. Для такого способа характерны ошибки в определении скорости.
Наиболее близким техническим решением является способ определения скорости движения судна, основанный на вертикальном излучении гармонических звуковых сигналов на дно, взаимно-корреляционной обработке отраженных сигналов, принятых двумя разнесенными по горизонтали приемниками, и определении скорости судна путем деления половины расстояния между приемниками на корреляционную взаимную задержку.
Недостатки известного способа являются сложность и недостаточная точность операции поиска величины корреляционной временной задержки (величины транспортного запаздывания между каналами), соответствующей максимуму коэффициента взаимной корреляции. Это объясняется слабо выраженным максимумом взаимно-корреляционной функции (ВКФ) отраженных сигналов.
Цель изобретения - повышение устойчивости точности.
Цель достигается тем, что известный способ определения скорости движения судна относительно дна (прототип), основанный на вертикальном излучении гармонических звуковых сигналов на дно, взаимно-корреляционной обработке отраженных сигналов, принятых двумя разнесенными по горизонтали приемниками, определении скорости движения судна путем деления половины расстояния между приемниками на корреляционную временную задержку сигнала первого по движению приемника относительно сигнала с второго приемника, изменен тем, что определяют квадрат коэффициента взаимной корреляции отраженных сигналов, определяют квадрат преобразования Гильберта от коэффициента взаимной корреляции отраженных сигналов, сравнивают их и по результатам сравнения находят корреляционную временную задержку. Отличие заключается в дополнении прототипа операциями:
1. Определения квадрата коэффициента взаимной корреляции отраженных сигналов.
2. Определения квадрата преобразования Гильберта от коэффициента взаимной корреляции отраженных сигналов;
3. Сравнения результатов операций 1 и 2;
4. Определения корреляционной временной задержки по результатам операции 3.
Совокупность операций и их последовательность обеспечивают не только сохранение тонкой структуры процесса изменения взаимосвязи (корреляционной) отраженных сигналов, но и повышение чувствительности к изменению корреляционной временной задержки одного отраженного сигнала относительно другого за счет совокупности двух преобразований данного процесса в квадратичную форму с одновременным сокращением периода колебаний его тонкой структуры.
Для оценки повышения точности способа рассмотрим типичную для прототипа форму коэффициента ВКФ вида
ρxy(τ)=e-b(τ)˙cos 2 π fо τ, (1) где fo - частота сигнала;
b - коэффициент, определяемый свойствами гидроакустического канала, отражательной способностью и характеристикой рельефа дна. Тогда поиск корреляционной временной задержки τдля прототипа осуществляется по процессу, описываемому выражением (1). Для заявляемого способа поиск τосуществляется по выражению (2) (
( Анализ выражения (2) по сравнению с (1) по точности показал, что:
Анализ выражения (2) по сравнению с (1) по точности показал, что:
1) В(τ) имеет более острый максимум в окрестности τ, определяющего положение максимума, за счет квадрата степенного множителя, а также косинусоиды с удвоенным значением аргумента (сокращение периода косинусоиды в два раза).
2) В(τ) сохранена тонкая структура, т.е. косинусоидальный множитель процесса.
3) Повышение крутизны в окрестности τ, определяющего положение максимума, обеспечивает устойчивую (надежную) точность способ (т.е. в условиях пологой ВКФ прототип уже не работает, а заявленный способ продолжает отслеживать аргумент максимума). Все это позволяет сделать вывод о достижении поставленной цели изобретения.
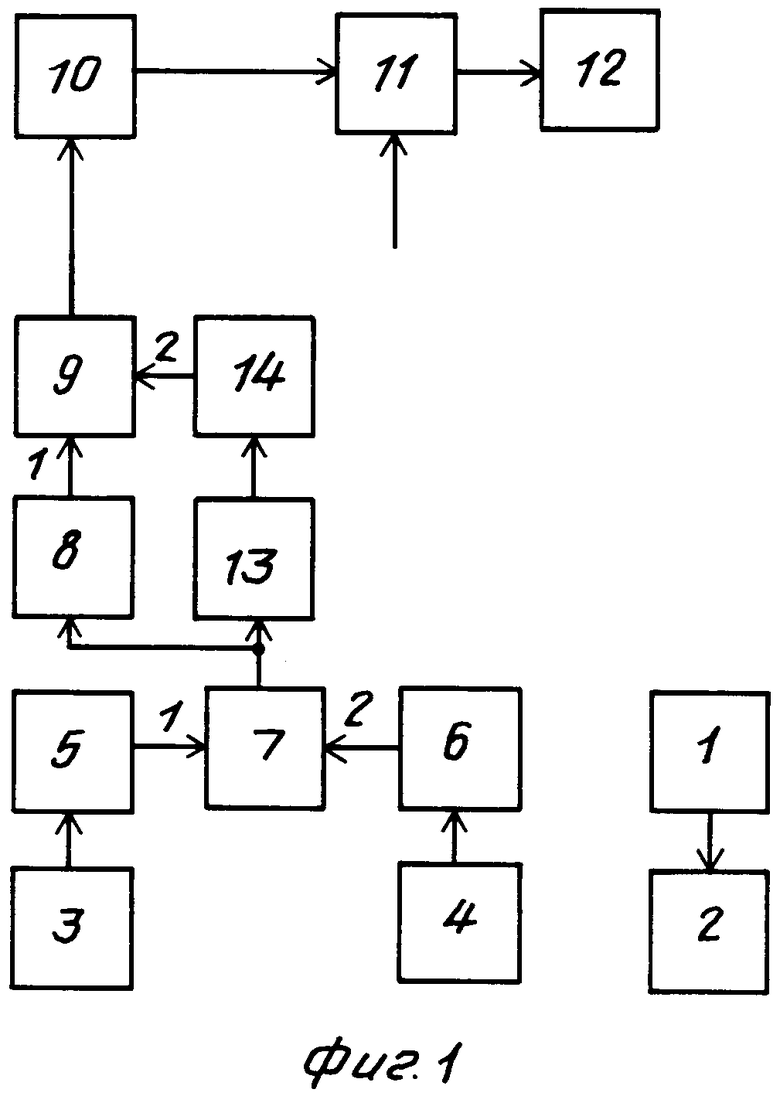
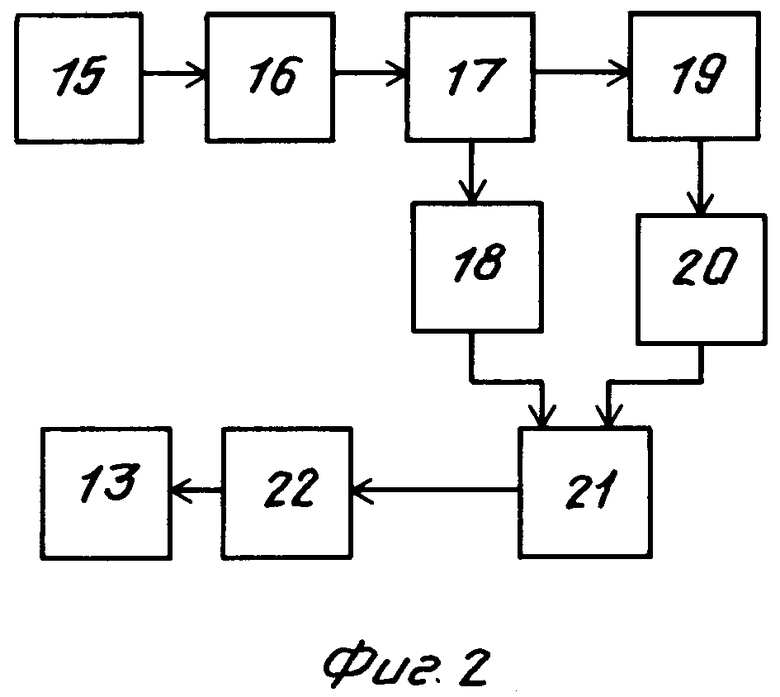
На фиг. 1 и 2 изображено устройство для осуществления предлагаемого способа; на фиг. 2 - блок-схема алгоритма.
Устройство состоит из генератора 1 гармонического звукового сигнала, соединенного с излучателем 2. Кроме того, состоит из первого 3 и второго 4 приемников, соединенных через соответствующие первый 5 и второй 6 полосовые усилители с первым и вторым входами первого 7 коррелятора. Выход первого 7 коррелятора соединен через последовательно включенные квадратор 8, блок 9 вычитания, второй 10 коррелятор с входом делителя блока 11 деления, выход которого соединен с индикатором 12, при этом на вход уменьшаемого блока 11 деления подано значение nd/2, кроме того выход первого коррелятора 7 соединен с входом первого квадратора 8 и с входом блока 13 преобразования Гильберта, выход блока 13 соединен через второй квадратор 14 с вторым входом блока 9 вычитания.
Устройство работает следующим образом.
Электрический гармонический сигнал с генератора 1 гармонического звукового сигнала поступает на излучатель 2, где он преобразуется в акустический сигнал и излучается вертикально вниз. Отражается от дна. Отраженный сигнал принимается первым 3 и вторым 4 приемниками, преобразуется в электрические сигналы, которые поступают на первый 5 и второй 6 полосовые усилители, с выхода которых передаются на соответствующие входы первого коррелятора 7, с выхода которого сформированный процесс изменения коэффициента взаимной корреляции отраженных сигналов поступает одновременно на вход первого квадратора 8 и в блок 13 преобразования Гильберта. С выхода первого квадратора 8 сигнал вида [ ρxy(τ)]2 поступает на первый вход блока 9 вычитания. Кроме того, в это время в блоке 13 преобразования Гильберта вычисляется процесс вида Г[ρxy(τ)]= (τ) и поступает через второй квадратор 14 на второй вход блока 9 вычитания. На выходе блока 9 вычитания процесс В(τ), описываемый выражением (2), поступает на вход второго коррелятора 10 для вычисления корреляционной временной τзадержки, значение которой поступает на вход делителя блока 11 деления, на вход уменьшаемого подано значение d/2. В результате вычисления V =
(τ) и поступает через второй квадратор 14 на второй вход блока 9 вычитания. На выходе блока 9 вычитания процесс В(τ), описываемый выражением (2), поступает на вход второго коррелятора 10 для вычисления корреляционной временной τзадержки, значение которой поступает на вход делителя блока 11 деления, на вход уменьшаемого подано значение d/2. В результате вычисления V =  полученное значение V скорости судна относительно дна высвечивается на индикаторе 12. Элементы и блоки устройства известной конструкции. Блок преобразования 13 Гильберта можно реализовать на базе микроконтроллера на БИС К 145 ИК 1807. Блок-схема алгоритма приведена на фиг. 2, где обозначено:
полученное значение V скорости судна относительно дна высвечивается на индикаторе 12. Элементы и блоки устройства известной конструкции. Блок преобразования 13 Гильберта можно реализовать на базе микроконтроллера на БИС К 145 ИК 1807. Блок-схема алгоритма приведена на фиг. 2, где обозначено:
15 - излучение гармонического (звукового) сигнала;
16 - прием отраженных от дна сигналов двумя приемниками;
17 - вычисление коэффициента ВКФ;
18 - вычисление квадрата коэффициента ВКФ;
19 - вычисление преобразования Гильберта от коэффициента ВКФ;
20 - вычисление квадрата преобразования Гильберта от коэффициента ВКФ;
21 - сравнение;
22 - поиск корреляционной временной задержки по результатам сравнения;
23 - вычисление скорости движения судна относительно дна.
Использование предлагаемого способа обеспечивает повышение точности определения скорости; повышение устойчивости (надежность работоспособности в неблагоприятных условиях, когда ρxy(τ) имеет слабо выраженный максимум и прототип уже не работает), точности определения скорости судна относительно дна.
Изобретение относится к морской навигационной технике и может быть использовано для определения скорости движения судна относительно дна. Цель - повышение точности. Цель достигается дополнением корреляционного способа операциями определения квадрата коэффициента ВКФ, квадрата преобразования Гильберта от коэффициента ВКФ, их сравнения и поиска корреляционной временной задержки по результатам сравнения. 2 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА, основанный на вертикальном излучении гармонических звуковых сигналов на дно, взаимной корреляционной обработке отраженных сигналов, принятых двумя разнесенными по горизонтали приемника и определении скорости движения судна путем деления половины расстояния между приемниками на корреляционную временную задержку, отличающийся тем, что определяют квадрат коэффициента взаимной корреляции отраженных сигналов, определяют квадрат преобразования Гильберта от коэффициента взаимной корреляции отраженных сигналов, сравнивают их и по результатам сравнения находят корреляционную временную задержку.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| А.А.Хребтов и др | |||
| Судовые измерители скорости | |||
| М.: Судостроение, 1978, с.286. | |||
