Изобретение относится к приборостроению, в частности к регуляторам.
Известен пропорционально-интегральный регулятор (ПИ-регулятор), не имеющий статической ошибки [1]. Этот регулятор содержит задатчик, элемент сравнения, элемент пропорциональный, элемент интегральный и сумматор, при этом выход задатчика соединен с одним из входов элемента сравнения, второй вход которого соединен с выходом датчика объекта, выход элемента сравнения соединен с входами пропорционального и интегрального элементов, выходы которых подсоединены к входам сумматоре, выход которого соединен с входом исполнительного органа объекта. Использование описанной схемы позволяет формировать на выходе ПИ-регулятора сигнал
X = Kп(Yз-YD)+Kи (Yз-YD)·dt где Kп, Kи - соответственно коэффициенты передачи пропорционального и интегрального элементов;
(Yз-YD)·dt где Kп, Kи - соответственно коэффициенты передачи пропорционального и интегрального элементов;
Yз, YD - соответственно сигналы на выходе задатчика и датчика.
Достоинства и недостатки регулятора проявляются при совместном функционировании его со стабилизируемым объектом, то есть при функционировании автоматической системы регулирования (АСР).
Основное различие между пропорциональным и ПИ-регулятором определяют по величине ошибки АСР в установившемся режиме (эту ошибку называют статической ошибкой) и по степени устойчивости АСР.
Преимуществом ПИ-регулятора является равенство нулю статической ошибки ε = Yз-YD в установившемся режиме АСР. Недостатками ПИ-регулятора, подключенного к объекту, является уменьшение запаса устойчивости АСР по фазе на 90о, что уменьшает степень устойчивости не менее чем вдвое, а также необходимость принимать дополнительные меры предосторожности при подключении ПИ-регулятора к объекту.
Наиболее близким по технической сущности к предлагаемому устройству является пропорциональный или П-регулятор [2], содержащий задатчик, элемент сравнения и элемент пропорциональный, причем один вход элемента сравнения соединен с задатчиком, другой вход - с датчиком объекта, выход элемента сравнения соединен с входом пропорционального элемента, а выход элемента пропорционального соединен с входом исполнительного органа на входе объекта. Использование описанной схемы позволяет формировать на выходе П-регулятора сигнал X = Kп (Yз - YD).
Преимуществами П-регулятора является отсутствие интегрального элемента, а вследствие этого большая степень устойчивости и удобство при подключении к объекту и настройке. Недостатком П-регулятора является обязательное наличие (не равенство нулю) статической ошибки в установившемся режиме, то есть ε = Yз - YD ≠0, что снижает точность регулирования.
Известно, что значение статической ошибки П-регулятора тем меньше, чем больше коэффициент передачи (усиления) элемента пропорционального, Kп; однако увеличение Kп может привести к неустойчивости АСР и аварии на объекте.
Цель изобретения - повышение точности регулирования за счет устранения статической ошибки при сохранении высокой степени устойчивости, присущей П-регулятору.
Цель достигается тем, что в известный П-регулятор, содержащий задатчик, элемент сравнения и пропорциональный элемент, причем один вход элемент сравнения соединен с задатчиком, другой вход - с датчиком объекта, выход элемента сравнения соединен с входом усилителя, а выход усилителя соединен с входом исполнительного органа на входе объекта, дополнительно введены второй задатчик и сумматор, один вход которого соединен с выходом усилителя, а второй вход сумматора - с выходом второго задатчика, выход сумматора является выходом регулятора, подключенного к исполнительному органу на входе объекта.
Благодаря тому, что в известный П-регулятор введены второй задатчик и сумматор, соединенные как указано выше, обеспечивается повышение точности регулирования при сохранении преимуществ, присущих П-регулятору.
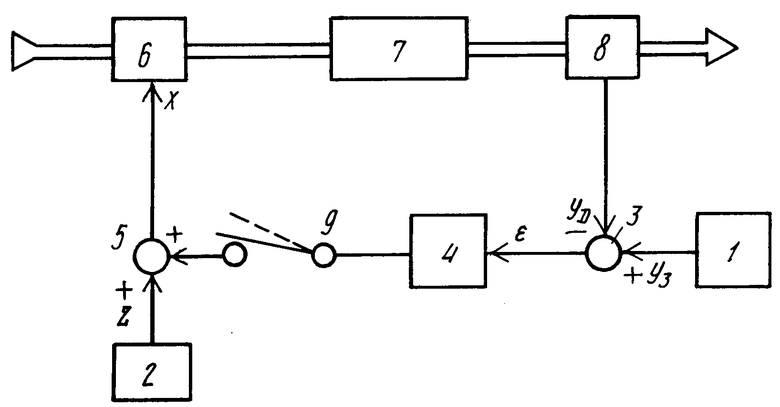
На чертеже представлена блок-схема предлагаемого регулятора, где 1 и 2 - соответственно первый и второй задатчики, 3 - сравнивающий элемент, 4 - усилитель, 5 - сумматор, 6 - исполнительный орган, 7 - объект регулирования, 8 - датчик, 9 - переключатель режимов. При этом один из входов элемента 3 сравнения соединен с выходом датчика 8 стабилизируемого параметра объекта регулирования, второй вход элемента 3 сравнения соединен с выходом первого задатчика 1, выход элемента 3 сравнения соединен с входом усилителя 4, выход которого через переключатель 9 режимов соединен с одним входом сумматора 5, второй вход которого соединен с выходом второго задатчика 2, выход сумматора 5 соединен с входом исполнительного органа, установленного на входе объекта.
Благодаря тому, что в известный П-регулятор введены дополнительно переключатель 9 режимов, второй задатчик 2 и сумматор 5, соединенные как указано выше, на выходе предлагаемого регулятора формируется сигнал X = Kп (Yз - YD) + Z, где Z - сигнал, формируемый вторым задатчиком.
Как известно, регуляторы должны обеспечивать возможность работы АСР или автоматизированного объекта в "ручном" и "автоматическом" состояниях. Опишем работу АСР с предложенным регулятором в этих состояниях.
При "ручном" состоянии выход усилителя 4 отключен от входа сумматора 5. Подавая на исполнительный орган 6 сигнал от второго задатчика 2, на выходе датчика 8 наблюдаем соответствующий сигнал. Объект может быть выведен в номинальный равновесный режим работы.
Для того, чтобы перейти к "автоматическому" состоянию АСР, устанавливают вторым задатчиком 2 сигнал Z таким, чтобы сигнал на выходе датчика 8 YD был в точности равен заданному значению Yз, устанавливаемому при помощи первого задатчика 1. При этом очевидно будет Yз = YD и ε = Yз - YD = 0. Подключая выход усилителя 4 к сумматору 5, переключателе 9 режимов переводят тем самым АСР в "автоматическое" состояние. При описанной процедуре включение регулятора будет "безударным", то есть замыкание контура регулирования через объект не вызовет переходных процессов в АСР.
При действии на объект возмущающих воздействий, приводящих к отклонению сигнала на выходе датчика 8 от заданного значения, установленного на выходе первого задатчика 1, регулятором будет вырабатываться компенсирующее воздействие Xп = Kп (Yз - YD), зависящее как от коэффициента усиления регулятора Kп, так и от разности Yз - YD. По мере действия на объект компенсирующего воздействия значение разности Yз - YD будет уменьшаться до тех пор, пока объект не войдет в новый равновесный режим.
Если при отклонении режима работы объекта от заданного не провести соответствующую коррекцию сигнала от второго задатчика Z, то в новом установившемся режиме может появиться некоторая статическая ошибка, но она будет значительно меньше, обычно в десять и более раз меньше, чем у обычного П-регулятора. Если эта ошибка будет признана существенной, АСР переводится в состояние "ручной" и производится соответствующая коррекция значения сигнала z, устраняющая статическую ошибку. Такая коррекция может быть проведена и в состоянии "Автоматический", но это требует определенной квалификации оператора.
Таким образом благодаря тому, что в известный П-регулятор дополнительно введены второй задатчик и сумматор, соединенные как указано выше, в предлагаемом регуляторе обеспечиваются следующие преимущества: устраняется (или сводится к незначительной) статическая ошибка, что приводит к повышению точности регулирования (при сохранении высокой степени устойчивости, присущей П-регулятору; появляется возможность управлять исполнительный органом не только в "ручном", но и в "автоматическом" состояниях АСР, что позволяет установить нулевую статическую ошибку ε = Yз - YD = 0 для любого режима работы объекта, определенного как основной (номинальный); появляется возможность выбрать значение коэффициента усиления регулятора (пропорционального элемента) из соображений только обеспечения необходимых устойчивости и качества переходных процессов, так как в предлагаемом регуляторе нет необходимости увеличивать значение Kп для того, чтобы уменьшить статическую ошибку регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120655C1 |
| Система управления непрерывной разливкой жидкого металла | 1974 |
|
SU607643A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫТЯГИВАНИЕМ ВОЛОКНА ПРИ ФОРМОВАНИИ | 2003 |
|
RU2237759C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1996 |
|
RU2128357C1 |
| Резервированная система автоматического управления | 1982 |
|
SU1113778A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ РЕКТИФИКАЦИИ ТРЕХКОЛОННОЙ БРАГОРЕКТИФИКАЦИОННОЙ УСТАНОВКИ | 1999 |
|
RU2174030C2 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА УСТОЙЧИВОЙ РАБОТЫ АСР | 2008 |
|
RU2388037C1 |
| Устройство для регулирования расходов компонентов при смешении | 1977 |
|
SU696422A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
Изобретение относится к приборостроению, в частности к регуляторам. Целью изобретения является повышение точности. Регулятор содержит задатчик и датчик регулируемого параметра, элемент сравнения, усилитель, переключатель режима, второй задатчик, сумматор, исполнительный орган. 1 ил.
РЕГУЛЯТОР, содержащий первый задатчик и датчик регулируемого параметра, выходы которых соединены с входами элемента сравнения, выход которого соединен с входом усилителя, и исполнительный орган, отличающийся тем, что, с целью повышения точности регулятора, в него введены переключатель режимов, второй задатчик и сумматор, выход которого соединен с входом исполнительного органа, входы - с выходами второго задатчика и переключателя режимов, вход которого соединен с выходом усилителя.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Наладка средств автоматизации и автоматических систем регулирования | |||
| Под ред.А.С.Клюева | |||
| М., Энергоатомиздат, 1989, с.75. | |||
