1
Изобретение относится к автоматизированным электроприводам ири управлении скоростью двигателя постоянного тока независимого возбуждения изменением напряжения на зажимах якоря. Оно может быть использовано в приводе металлорежупдих станков, в металлургических приводах, приводе бумагоделательных машин и других приводах, производительиость которых зависит от времени протекания переходных процессов.
В основном авт. св. № 439052 описано устройство , содержаидее задатчик иитенсивности, пропорциональный регулятор скорости и узел установления величины жесткости регулировочных характеристик электродвигателя, содержащий модель системы регулирования, подключенную к одному из входов элемента сравнения, второй вход которого соединен с датчиком скорости, а выход через компенсирующее звено- с входом регулятора скорости. При этом вход модели соединен с выходом задатчика интенсивности, в узле установления величины жесткости механических характеристик компенсирующее звено выполнено в виде интегратора при необходимости полной компенсации падения скорости или в виде ииерционного звена первого порядка при частичной компенсации падения скорости.
Такое выполнение компенсирующего звена обеспечивает заданные статические (установившиеся) режимы регулирования скорости и отработку ошибки регулирования скорости с астатизмом первого порядка. Однако отработка большой ошибки регулирования, связанной с действием значительного возмущения (например, ударный наброс нагрузки на валу двигателя) происходит с недостаточной интенсивностью. Этот недостаток компенсирующего звена обусловлен тем, что его иараметры жестко связаны с динамическими свойствами всей системы. Параметры обычно выбираются исходя из перерегулирования 5-10% при спадении ошибки до нуля. Так, если используется трехконтурная система регулирования, то передаточная функция компенсирующего звена равна
w(p) .(1)
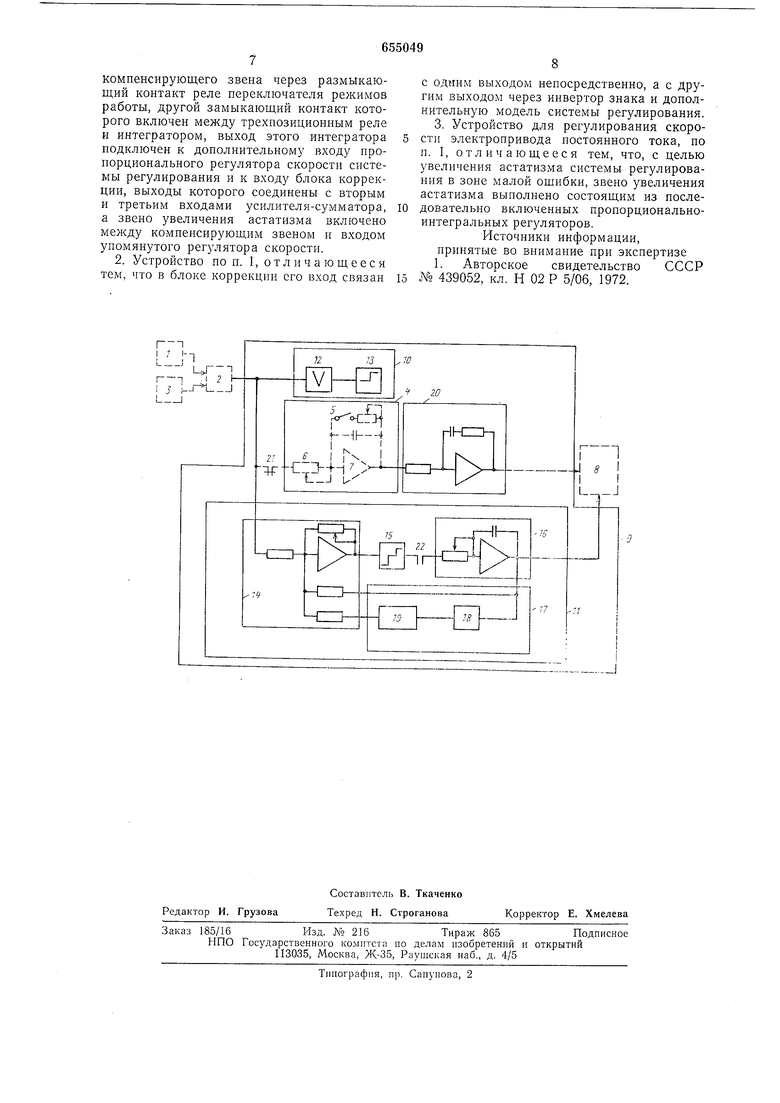
1.,,pПри настройке параметров на большую интенсивность отработки ошибки вся система регулирования становится колебательной и возможна потеря устойчивости, т. е. работоспособности. Из-за этого не удается повысить интенсивность отработки ошибки. Кроме того, необходимо повышение точности. Цель изобретения состоит в уменьшении ошибки регулирования в переходных процессах путем увеличения интенсивности отработки ошибки, а также повышения астатизма системы при обработке малой ошибки. Эта цель достигается тем, что в состав узла установления величины жесткости введены дополнительно звено увеличения астатизма, релейный канал отработки ошибки и переключатель режимов работы, состоящий из последовательно включенных звена выделения модуля ошибки и реле, релейный канал образован последовательным соединением усилителя-сумматора, трехпозиционного реле и интегратора, охваченных встречно-параллельно включенным блоком коррекции. При этом выход элемента сравнения связан со звеном выделения модуля и с первым входом усилителя-сумматора непосредственно и с входом компенсируюш,его звена через размыкаюш,ий контакт реле переключателя режимов работы, другой замыкающий контакт которого включен между трехпозиционным реле и интегратором. Выход этого интегратора подключен к дополнительному входу пропорционального регулятора скорости системы регулятора скорости системы регулирования и к входу блока коррекции, выходы которого соединены с вторым и третьим входами усилителя-сумматора. Звено увеличения астатизма включено между компенсирующим звеном и входом упомянутого регулятора скорости. В блоке коррекции его вход связан с одним выходом непосредственно, а с другим выходом через инвертор знака и дополнительную модель системы регулирования. Звено увеличения астатизма выполнено состоящим из последовательно включенных пропорционально-интегральных регуляторов. При этом в зоне малой ощибки система регулирования работает как линейная система с астатизмом высокого порядка, а в зоне большой ошибки - как более быстродействующая система, к входу которой приложено компенсирующее воздействие от релейного канала. Режимы отработки малой и большой ошибок разделены, выбор нужного режима осуществляет автоматически переключатель режимов работы. На чертеже представлена схема предлагаемого устройства. Элементы 1-9 входят в состав устройства по основному авторскому свидетельству и их связи, имевшие место в известном устройстве, показаны на чертеже пунктирными линиями. При этом приняты следующие обозначения: 1 - модель системы регулирования, 2 - элемент сравнения, 3 - датчик напряжения, 4-компенсирующее звено, 5- ыключатель, 6 - резистор, 7 - усилитель, - регулятор скорости, 9 - узел установления величины жесткости. Входы элемента 2 сравнения связаны с ыходом модели 1 системы регулирования и с выходом датчика 3 напряжения. Выход элемента 2 сравнения соединен переключателем 10 режимов работы, с компенсирующим звеном 4 и с релейным каналом 11. Переключатель 10 режимов включает в себя последовательно соединенHbie звено 12 выделения модуля ошибки регулирования и реле 13. Звено выделения модуля связано с выходом элемента 2 сравнения. Релейный канал состоит из усилителя-сумматора 14, первый вход которого соединен с выходом элемента 2 сравнения, а выход через трехпозиционное реле 15 и интегратор 16 - с дополнительным входом пропорционального регулятора 8. Блок 17 коррекции релейного канала включает в себя непосредственную связь между выходом интегратора 16 и вторым входом усилителя-сумматора 14, а также инвертор 18 знака и дополнительную модель 19 системы регулирования, связанные с выходом интегратора 16 и третьим входом усилителя-сумматора 14. На чертеже в звене 20 увеличения астатизма показан один ПИ-регулятор, включенный между звеном 4 и входом регулятора 8 скорости. Реле 13 переключателя 10 режимов работы имеет размыкающий 21 и замыкающий 22 контакты. Устройство работает следующим образом. Звено 12 выделяет из сигнала элемента 2 сравнения сигнал модуля ощибки, подаваемый на реле 13 переключателя 10. Рассмотрим сначала режим обработки малой ошибки. В этом режиме мал сигнал элемента 2, выходное напряжение звена 12 также небольщое. Реле 13 не срабатывает. Релейный канал 11 не работает, так как контакт 22 реле 13 разомкнут. Работу через замкнутый в этом режиме контакт 21 реле 13 осуществляют компенсирующее звено 4 и ПИ-регулятор звена 20. Звено 4, будучи интегратором при разомкнутом выключателе 5, обеспечивает астатизм первого порядка по ошибке. ПИ-регулятор звена 20 увеличивает астатизм системы до второго порядка. Возможно включение в звене 20 любого числа ПИ-регуляторов. Включение каждого ПИ-регулятора увеличивает астатизм системы на единицу. При этом постоянные времени последующих ПИ-регуляторов удваиваются по сравнению с постоянным времени предыдущих регуляторов. Так, при передаточной функции компенсирующего звена согласно формуле (1) передаточные функции первых двух регуляторов принимают вид 1 + .p 1 + й2T.p 327i.p
Увеличение астатизма системы повышает точность обработки ошибки, но одновременно увеличивается инерционность системы. Порядок системы со звеном по выражению (1) на единицу выше, а нри включении еш,е и регуляторов по выражению (2) выше на 2, на 3 и так далее порядков исходной системы регулированпя. Поэтому астатпзм увеличен только в небольшой зоне малой ошибки.
В режиме обработки большой ошибки реле 13 включено и звенья 4 п 20 отключены контактом 21 реле, а релейный канал вводится в работу замыкающимся контактом 22. В соответствии с полярностью выходного сигнала усилителя-сумматора 14 реле 15 срабатывает в ту или иную сторону, подавая ступенчатый сигнал необходимой полярности на интегратор 16. Интегратор преобразует сигнал реле в линейно-изменяюш.ееся напряжение, поступающее на вход регулятора 8 скорости. Далее система регулирования быстро отрабатывает ошибку, в результате чего сигнал на выходе элемента 2 сравнения уменьшается. Выключение реле 15 необходимо осуществить с упреждением во избежание появления низкочастотных автоколебаний. Эту операцию производит блок 17 коррекции.
Полярность сигнала на втором и третьем входах усилителя-сумматора 14 (эти сигналы образуются сложением выходного напряжения интегратора 16 с этим же напряжением, прошедщим через инвертор 18 знака и дополнительную модель 19 системы регулирования) обратна полярности сигнала на выходе элемента 2 сравнения. Когда сумма этих трех сигналов станет равной нулю, реле 15 отключится и на выходе интегратора 16 установится неизменное па |ряженис. Дальнейшее спадание ошибки происходит при движении системы по инерции, и интенсивность спадания ошибки постепенно уменьшается. При этом блок 17 коррекции поддерживает напряжение на входе реле 15 равным нулю. Требуемый характер изменения корректирующего сигнала обеспечивается моделью 19, упрощенно оппсывающей систему регулирования. Когда сигнал модуля ощибки на входе реле 13 станет меньше зоны его нечувствительности, реле 13 отключается размыкается контакт 22 и замыкается контакт 21. Звенья 14 и 20 плавно сводят ощибку к нулю, при этом напряжение интегратора 16 поддерживается неизменным.
Регулировка интенсивности отработки ощибки релейным каналом 11 обеспечивается изменением величины входного резистора интегратора 16. Необходимый корректирующий сигнал устанавливается автоматически, что является преимуществом технического решения блока коррекции. В блоке коррекции инвертором знака служит звепо с передаточным отношением минус единица. Этим звеном может быть развязанный по входу датчик напряжения. Модель 19 можно выполнить упрощенно - как звено первого или второго порядка.
Применение модели исключает увеличение помех прп формировании корректирующего сигнала.
. Элемепты релейного канала не влияют на динамику системы. Роль релейного канала сводится к подаче па регулятор 8 скорости компенсируюп;его воздействия от интегратора.
В предлагаемом устройстве это воздействие изменяется по линейному закону за счет благоприятного характера отработки этого сигнала системой регулирования. При отработке сигнала релейного канала участвует иперциопность только самой системы регулирования (отработка по разомкнутому циклу). Здесь инерционности звеньев 4 и 20 исключены. При отработке малой ошибки возможен в принципе аетатизм любого порядка.
Таким образом, предлагаемое устройство совмещает в себе высокую интенсивность и точность отработки ошибки. Вся система в целом работает как линейная система. С помощью данного устройства осуществляется контроль за процессом управления системы регулирования и оперативно компенсируются параметрические п функциональные возмущеппя. Релейный канал 11 п звенья 4 и 20 настраиваются раздельно.
К преимуществу предлагаемого устройства можно отнести п то обстоятельство, что наладка устройства п его ввод в экспулатацию можно осуществить без остановки действующего электропривода. Техническое решеппе устройства иостроепо таким образом, чтобы избежать прпме еппя дифферспцпрующих п других элементов, работа которых связана с плохой помехозащищенностью. Применение устройства возможно в электроприводах постоянного тока, имеющих разпые собственные системы управления.
Фор м у л а изобретен и я
1. Устройство для регулированпя скорости электродвигателя постоянпого тока по авт. св. Л 439052, отличающееся тем, что, с це.чью уменьщенпя ошибки регулированпя в переходных процессах, в узел установления величины жесткости дополнительно введены звено увеличения астатизма, релейный канал п переключатель рел пмов работы, состоящий из последовательно включеппых звепа выделения модуля ошибки п реле, релейный капал образован последовательным соедппеппем усплителя-сумматора, трехпозициопного реле п интегратора, охвачепмых встреч ю-параллельпо включенным блоком коррекции, причем выход элемента сравнеппя связан со звепом выделенпя модуля п с первым входом усплптелясу.мматора непосрсдствепно п с входом
компенсирующего звена через размыкающий контакт реле переключателя режимов работы, другой замыкающий контакт которого включен между трехнозиционным реле и интегратором, выход этого интегратора подключен к дополнительному входу пропорционального регулятора скорости системы регулирования и к входу блока коррекции, выходы которого соединены с вторым и третьим входами усилителя-сумматора, а звено увеличения астатизма включено между компенсирующим звеном и входом упомянутого регзлятора скорости.
2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что в блоке коррекции его вход связан
с одним выходом непосредственно, а с другим выходом через инвертор знака и дополнительную модель системы регулирования. 3. Устройство для регулирования скорости электропривода постоянного тока, по п. 1, отличающееся тем, что, с целью увеличения астатизма системы регулирования в зоне малой ошибки, звено увеличения астатизма выполнено состоящим из последовательпо включенных пропорциональноинтегральных регуляторов.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 439052, кл. Н 02 Р 5/06, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления позиционным электроприводом | 1977 |
|
SU714352A1 |
| Самонастраивающаяся система регулирования скорости | 1974 |
|
SU585475A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1972 |
|
SU439052A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| Система управления | 1984 |
|
SU1215084A2 |
| СУПЕРВИЗОРНЫЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2157558C1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| Регулятор с переменной структурой | 1985 |
|
SU1348770A1 |
г;
70
Ч 20
