Изобретение относится к устройству для управления и контроля машин, в частности технологических установок, изготавливающих детали в два или большее количество шагов, содержащему управляющие приспособления для электрических и/или электронных, приводимых в действие рабочей средой переключительных, исполнительных, контролирующих органов и приводов машины и/или предназначенных для нее обрабатывающих и сборочных приспособлений.
Известны системы различного назначения, выполненные с помощью съемных функциональных модулей [1].
Известна также система управления устройством для реализации технологических операций, содержащая блок управления, коммутационные модули, каждый из которых состоит из пневматического клапана, причем клапан через разъемы соединен с пневматической распределительной платой, а электропривод каждого клапана через первый многоконтактный штеккер соединен с соответствующим электрическим модулем [2].
Однако известное устройство сложно конструктивно и ненадежно при ошибках монтажа.
Целью изобретения является упрощение конструкции и повышение надежности системы.
Цель достигается за счет того, что в системе управления устройство для реализации технологических операций, содержащей блок управления, коммутационные модули, каждый из которых состоит из пневматического клапана и электропривода клапана, причем клапан через разъемы соединен с пневматической распределительной платой, а электропривод каждого клапана через первый многоконтактный штеккер соединен с соответствующим электрическим управляющим модулем, между электоприводами коммутационных модулей и соответствующим электрическим управляющим модулем расположена электрическая распределительная плата, причем между ней и электроприводами коммутационных модулей установлены первые многоконтактные штеккеры, а второй многоконтактный штеккер установлен между электрической распределительной платой и электрическим управляющим модулем, который имеет входной и выходной преобразователи, связанные с блоком управления.
Дополнительными отличиями является то, что в электрическом управляющем модуле установлен третий многоконтактный штеккер, соединенный с каналами управления от контрольных органов устройств для реализации технологических операций, то, что электрический управляющий модуль выполнен программируемым, то, что между входным и выходным преобразователями и вторым многоконтактным штеккером установлены промежуточные блоки памяти, то, что штырьки многоконтактных штеккеров выполнены регулируемыми, то, что она снабжена контрольными модулями, подключенными к электрическим управляющим модулям и через них к блоку управления, то, что второй и третий многоконтактные штеккеры размещены непосредственно на электрической распределительной плате.
На фиг. 1 показано несколько технологических позиций устройства для изготавливаемых в два или большее количество шагов деталей, вид сбоку; на фиг. 2 изображена система управления, собранная согласно изобретению из нескольких коммутационных и управляющих модулей; на фиг. 3 показаны коммутационный модуль и электрический управляющий модуль с распределительной платой, разрез А-А на фиг. 2; на фиг.4 представлена система, состоящая из распределительной платы, многоконтактного штеккера, коммутационного и управляющего модулей, в разобранном виде; на фиг. 5 - упрощенная блок-схема системы; на фиг. 6 - блок-схема коммутатционного модуля в соответствии с фиг. 2 и 4; на фиг. 7 - другая форма выполнения системы; на фиг. 8 изображен вариант монтажа системы с коммутационным модулем с несколькими клапанами и переключательными органами.
На фиг. 1 показаны три технологические позиции 2, 3 и 4, соответствующие трем операциям устройства 1. Каждая из этих технологических позиций снабжена блоком 5 энергоснабжения для рабочей среды и электрической энергии. Технологические позиции 2, 3 и 4 устройства 1 могут быть выполнены в зависимости от потребности как рабочее место с ручным обслуживанием или как автоматическое рабочее место. Для этого технологические позиции имеют одинаковую фундаментную раму 6, которая опирается на пол через регулируемые по высоте опорные стойки. На верхней стороне каждой технологической позиции установлено транспортирующее приспособление 7, которое имеет приводы 8, образованные, например, электродвигателями, приводы снабжены фрикционными роликами 9. Эти фрикционные ролики соприкасаются с боковыми поверхностями приспособлений 10 для крепления обрабатываемой детали, которые с помощью фрикционных роликов 9 продвигаются вперед в направлении стрелки 11 вдоль транспортирующего приспособления 7. На каждом из приспособлений 10 для крепления обрабатываемой детали зажата деталь 12, которая обрабатывается в отдельных технологических позициях 2-4. В соответствии с этим эти технологические позиции оборудованы различными обрабатывающими и сборочными приспособлениями 13. Обрабатывающие и сборочные приспособления могут быть образованы клепальными машинами, автоматическими винтовертами, запрессователями или манипулирующим приспособлением 14 и вставляющим агрегатом 15, как, например, в технологических позициях 3 и 4. Манипулирующим приспособлением 14 могут, например, с помощью размещенного на нем захвата 16 центрироваться на детали 12 отдельные составные элементы, как контакты или т.п. Вставляющий агрегат 15 служит чаще всего для того, чтобы вставлять в деталь, например, шайбы или заклепки, для чего вставляющие агрегаты оборудованы вакуумными захватами 17. Манипулирующее приспособление 14 содержит стойку 18, на которой установлена с возможностью регулирования по высоте и фиксации опора 19. Опора 19 снабжена напраляющими втулками для направляющих колонок, на которых закреплен держатель 20. Держатель 20 может перемещаться по высоте относительно верхней стороны технологической позиции 3 и также относительно опоры 19 с помощью направляющих колонок и привода 21, приводимыми в действие сжатым воздухом или гидравликой. Привод 21 установлен на опоре 19, и шток его поршня соединен с держателем 20. В держателе 20 установлен захват 16 с возможностью перемещения в продольном направлении транспортирующего приспособления 7, т. е. в направлении стрелки 11. Для контроля движений держателя и приводов манипулирующего приспособления 14 предусмотрены контролирующие органы 22, 23. Рядом с ними размещены амортизаторы 24 для ограничения возвратно-поступательного движения привода 21. Для питания, в частности, привода 21 в зоне манипулирующего приспособления 14 размещена система 25 управления. Однотипно выполненная система 26 размещена во вставляющем агрегате 15. Эти системы соединены через центральную соединительную линию 27 с центральным блоком 28 управления. Таким же образом соединяются с центральной соединительной линией 27 приводы 8 и предусмотренные для контроля поступательного движения приспособлений 10 для крепления обрабатываемой детали контролирующие органы 29, один из которых изображен в зоне технологической позиции 3 и 4, и приводы и контролирующие органы предназначенных для этих технологических позиций приспособлений 30 для подачи деталей. Наряду с центральным блоком 28 управления, который оборудован выключателями 31, кнопками 32 и измерительными приборами 33, а также сигнальным элементом 34 для контроля и наблюдения и в данном случае для выдачи управляющих команд технологической установки 1, на отдельных технологических позициях 2-4 могут быть размещены, как это показано, например, в технологической позиции 4, независимые приспособления 35 для наблюдения и контроля, которые могут быть снабжены сигнальными элементами 36 и органами управляющих команд.
На фиг. 2 изображены манипулирующее приспособление 14 технологической позиции 3, а также предназначенный для транспортирующего приспособления 7 привод 8 с предназначенным для них контролирующим органом 29 и система управления. Как видно из фиг. 2, в держателе 20 размещен привод 37 для перемещения установленного в промежуточной опоре 38 захвата 16. Предназначенная для этого система 25 управления состоит из нескольких коммутационных модулей 39 и 40 и некоторого количества электрических управляющих модулей 41. Модули 41 закреплены на распределительные платы 42, а модули 39, 40 - на пневматической распределительной плате 43. Платы 43 и 42 состоят из нескольких отдельных частей 44, 45, 46 и 47, 48, 49. Эти отдельные части служат соответственно для размещения заданного числа коммутационных модулей 39, 40 и управляющих модулей 41. Число размещенных на одной такой отдельной части управляющих и коммутационных модулей 41, 39, 40 может выбираться любым. Плата 42 в настоящем примере выполнения закреплена на распределительной плате 43.
Управляющие модули 41 на их верхней плоскости снабжены соединительными приспособлениями, третьим многоконтактным штеккером 50 для подсоединения предназначенных для управляемых приводов контролирующих органов.
Коммутационный модуль 39 оборудован электрическими переключательными органами для управления приводом 8, коммутационные модули 40 образованы электромагнитными клапанами 51 рабочей среды.
Для питания клапанов рабочей средой предусмотрена линия 52 подачи рабочей среды от блока 5 энергоснабжения, которая питает центральный распределительный канал внутри пневматической распределительной платы 43. Для возврата рабочей среды от клапанов 51 и приводов, например, 21, 37, в плате 43 размещен сборный канал, который соединен через линию 53 возврата рабочей среды с шумоглушителями 54 при сжатом воздухе или с резервуаром при гидравлической системе. Противоположный к подводящей линии 52 конец питающего канала закрыт пробкой 55. Для герметичного соединения отдельных распределительных плат - отдельных частей 44, 45, 46 - могут использоваться кольца круглого сечения или металлические прокладки, или любые известные в технике средства. Соединение отдельных частей плат осуществляется винтами 56 или любыми соединительными элементами.
На фиг. 3 изображен разрез по комбинированным коммутационным 40 и управляющим 41 модулям. На нижней стороне платы 43 размещен направляющий элемент 57, выполненный в виде ласточкиного хвоста. С его помощью отдельные части 44, 45, 46 платы 43 могут устанавливаться в соответствующей сопряженной части и собираться до любой длины. В плате 43 предусмотрен центральный распределительный канал 58 для подачи рабочей среды к отдельным коммутационным модулям 40 и сборный канал 59 для отвода рабочей среды от модулей 40.
Модули 40 состоят из электропривода 60 и корпуса 61 пневматического клапана. Корпус 61 клапана имеет соединительное приспособление - разъемы 62, на которых впускные и выпускные каналы 63 и 64 расположены так, что соединяются с центральным распределительным каналом 58 и сборным каналом 59 платы 43. Кроме того, на корпусе 61 клапана предусмотрено отверстие 65 выпуска рабочей среды для соединения с потребителем. Соединение отверстия 65 выпуска рабочей среды с центральным распределительным каналом 58 и сборным каналом 59 в плате 43 осуществляется через распределительный поршень 66 клапана, который через шток соединен с магнитным сердечником 67 электропривода 60. Перемещение магнитного сердечника 67 осуществляется при попеременном подводе тока к катушкам 68, 69. Электрические входы 70, 71 для подачи сигналов на катушки 68, 69 объединены в приводе 60 в первый многоконтактный штеккеp 72. Он служит для соединения коммутационного модуля 40 с соответствующим управляющим модулем 41. Модуль 41 имеет наряду с соединительным приспособлением 50 для контролирующих органов соединительное приспособление 73, которое может быть образовано вторым многоконтактным штеккером 74. Через соединительное приспособление 73 управляющий модуль соединен с распределительной платой 42.
На фиг. 4 показаны такие же коммутационный и управляющий модули 40 и 41, как и на фиг. 3, однако управляющий модуль 41 изображен разъединенно с распределительной платой 42 и с приводом 60 коммутационного модуля 40. Привод 60 и корпус 61 клапана модуля 40 также могут разъединяться друг с другом корпус 61 клапана изображен на расстоянии от распределительной платы 43. Штриховые линии 75 показывают, как соединяются отдельные части коммутационного модуля 40 друг с другом и с управляющим модулем 41.
Соединительное приспособление 62 для соединения впускного канала 63 рабочей среды и выпускного канала 64 рабочей среды с центральным распределительным каналом 58 и сборным каналом 59 образовано вставленными в эти каналы соединительными элементами 76 и вставленными в распределительную плату гнездами 77. Соединение между приводом 60 и корпусом 61 клапана осуществляется, например, с помощью монтажного элемента 78, который может снабжаться резьбой для ввинчивания в шток распределительного поршня 66. Соединительные приспособления 72 и 73 образованы многоконтактными штеккерами. В соединительном приспособлении (штеккере) 72 входы 70, 71 привода 60 выполнены в виде штеккерных элементов 79, сопряженные части этого соединительного приспособления 72 в управляющем модуле 41 выполнены в виде гнезд 80. Иначе выполнены многоконтактные штеккеры в соединительном приспособлении 73 и соединительном приспособлении 81. С помощью последнего соединяется отдельная часть 48 распределительной платы 42 с примыкающими отдельными частями 47 и 49. В этом случае в соединяемых друг с другом частях предусмотрены соответственно только гнезда 82. Если необходимо соединить друг с другом два соответствующих гнезда обеих частей соединительного приспособления 73, 81, то в одно из обоих гнезд 82 вставляются штеккерные элементы 83. Это меняющееся выполнение соединительных приспособлений (многоконтактных штеккеров) 73 и 81 позволяет соединять содержащиеся в распределительной плате 42 управляющие и сигнальные линии соответственно только с отдельными управляющими модулями 41, например при соединении размещенных рядом друг с другом отдельных частей 47, 48, 49 и соединении с многоконтактным штеккером 84, соединяющим эту сигнальную шину с центральной питающей линией 27 (фиг. 2).
Для выполнения функции наблюдения и контроля управляющий модуль 41 соединен через соединительное приспособление 85 с контрольным модулем 86. Выполнение соединительного приспособления 85 могут осуществляться соответственно соединительными приспособлениями (штеккерами) 72 и 73. Кроме того, модуль 86 может быть снабжен сигнальным элементом 87 и кнопками или выключателями для аварийных функций, как, например, кнопкой 88 для аварийного останова. Для этого контролирующий модуль 86 снабжен схемными элементами, которые позволяют, исходя из входного сигнала контролирующих органов 22, 23, 29 и выходов управляющих и сигнальных линий, которые объединены в соединительном приспособлении 85, осуществлять индикацию положения приводов и/или обрабатывающих и сборочных приспособлений и приспособлений для подачи деталей на сигнальном элементе 87. Одновременно индикация может осуществляться также на сигнальных элементах 34 и 36 центрального блока 28 и приспособлении 35 для наблюдения и контроля. Модули 86 могут размещаться в контролирующем приспособлении 35 и в блоке 28, чтобы сигнализировать оператору о соответствующем монтажном шаге, в котором произошло прерывание технологического процесса.
На фиг. 5 показана упрощенная блок-схема модулей 39, 40, 41, которые размещены на отдельных частях 44, 45, 47, 48 распределительной платы 43 и распределительной платы 42 (фиг. 2) с предназначенными для них приводами 8, 21 и контролирующими органами 22, 23 и 29. Для этого из управляющих модулей 41, который соответствует изображенному на фиг. 3 и 4 модулю, предназначен контрольный модуль 86.
Распределительная плата 42 содержит две различные цепи линий, а именно управляющие линии 89 и сигнальные линии 90. Управляющие линии 89 служат для подачи информации и команд переключения от блока 28 и контролирующего приспособления 35 и расположенных на удалении других контролирующих органов или т.п. к оптическим элементам 91 связи управляющих модулей 41. Как видно, отдельные управляющие линии 89 и сигнальные линии 90 соединяются в зоне соединительных приспособлений 81 между отдельными частями распределительной шины с помощью показанных на фиг. 4 штеккерных элементов 83.
Распределительная плата 42 служит в изображенном примере выполнения одновременно так же, как центральная соединительная линия 27, так как блок 28 и контролирующее приспособление 35 своими соединениями непосредственно связаны с распределительной платой 42.
Сигнальные линии 90 служат в дополнение к управляющим линиям 89 для передачи прямых информаций между логическими элементами 92 отдельных управляющих модулей. Логические элементы 92 могут быть образованы интегральными электронными элементами как в аналоговой, так и цифровой технике или микропроцессором. К логическим элементам 92 подключены оконечные усилительные каскады 93, через которые могут передаваться информации из логических элементов 92 в управляющие линии 89 для передачи к блоку 28 и контролирующему приспособлению 35 или к другим управляющим модулям и к приспособлениям или т.п. технологической установки 1. Кроме того, в оконечных усилительных каскадах 93 формируются и усиливаются сигналы для приведения в действие коммутационных модулей 40.
Входные сигналы подаются от контролирующих органов 22, 23, 29, которые могут быть образованы, например бесконтактными переключателями, через оптические элементы 91 связи к логическим элементам 92.
Вместо размещения по одному управляющему модулю 41 для каждого коммутационного модуля 39 и 40 можно разместить, например, соответственно для пяти коммутационных модулей 39, 40 только один управляющий модуль 41, который может быть выполнен объемнее. В настоящем примере коммутационные модули 39, 40 изображены только как клапаны 51 и как электрический силовой переключательный элемент 94, контактор управления, реле и т.п.
Особое преимущество имеет соединение управляющих модулей 41 с модулями 86, как это показано, например, на фиг. 5. Благодаря соединению модуля 86 с размещенным в линии 95 подачи рабочей среды к приводу 21 реле 96 давления и предназначенным для привода 60 контролирующим органом, выходные сигналы которых подаются через оптический элемент 91 связи к модулю 86, можно легко при передаче выходных сигналов модуля 86 через оконечный усилительный каскад 93 к блоку и контролирующему приспособлению 35 прямо оптически индицировать при неисправности соответствующую причину.
На фиг. 6 изображен управляющий модуль 41 со своим оптическим элементом 91 связи, логическим элементом 92 и оконечным усилительным каскадом 93. Логический элемент 92 содержит управляющие элементы 97 и логические элементы 98. Управляющие элементы 97 образуются, например, инвертором 99 и каскадом 100 счетчика времени, а логические элементы 98 образуются элементами И 101, 102, 103 и элементом ИЛИ 104. Если, например, к входу 105 подается сигнал от управляющей линии 89, то подводящая линия к элементу И 101 принимает через оптический элемент 91 связи коммутационное положение "1". При этом может речь идти о команде пуска от блока 28. Если вход 106 нагружается через сигнальную линию 90, то второй вход элемента И 101 принимает коммутационное положение "1". Тем самым выход элемента И 101 принимает положение "1". Это коммутационное положение "1" на выходе элемента И 101 или коммутационное положение "1" на входе 107, обусловленное, например, командой пуска другого управляющего модуля 41 по сигнальной линии 90, вызывает коммутационное положение "1" на выходе элемента ИЛИ 104. Если вход 108, соединенный с управляющей линией 89, которая идет от блока 28, предназначен на время T1 = 0, например, для ожидания перекрывающей рабочей операции другого управляющего модуля, то выход каскада 100 счетчика времени через инвертор 99 по истечении времени T1 принимает коммутационное положение "1". Так как теперь оба входа элемента И 102 имеют коммутационное положение "1", то на выходе этого элемента И также имеется сигнал единицы, который будет усилен оконечным усилительным каскадом 93 для приведения в действие клапана 51.
Сигнал единицы на выходе элемента И 102 и сигнал на входе 109, который соединен через соединительную линию 110 с контролирующим органом 22, вызывает после прохождения через оптический элемент связи коммутационное положение "1" в следующей сигнальной линии. Тем самым на обоих входах элемента И 103 имеется коммутационное положение "1" и вызываемый в результате этого выходной сигнал единицы подается через оконечный усилительный каскад 93 к выходу 11 управляющего модуля 41 и по управляющей линии 89 посылается к блоку 28 и к приспособлению 35 для наблюдения и контроля.
По истечении установленного в каскаде 100 счетчика времени его выход принимает коммутационное положение "1", которое может усиливаться оконечным усилительным каскадом 93 и через выход 112 по примыкающей управляющей линии 89 передаваться для исполнительной сигнализации, например, к модулю 86.
Модуль 86 может содержать инвертор 113, элемент И 114 и каскад 115 счетчика времени. Реле 96 давления соединено по линии 116 с входом 117 управляющего модуля 41. Выход 117 соединен через оптический элемент 91 связи с элементом И 114 в модуле 86. Элемент И 114 имеет другой вход, который соединен через инвертор 113 и оптический элемент 91 связи с входом 109 управляющего модуля 41. Третий вход элемента И 114 соединен с выходом элемента И 102 управляющего модуля 41. Выход элемента И соединен через каскад счетчика времени и усилитель оконечного усилительного каскада 93 с выходом 118 управляющего модуля.
Функции модуля 86 соответствующего положения перемещения привода 21 и манипулирующего приспособления 14 заключаются в следующем.
Если через выход элемента И 102 и оконечный усилитель оконечного усилительного каскада 93 нагружается привод 60 клапана 51, то одновременно на одном из трех входов элемента И 114 появляется входной сигнал. Открывается клапан 51 и рабочая среда поступает от блока энергоснабжения в камеру цилиндра привода 21. Эта смена давлений фиксируется реле 96 давления, и от реле давления по соединительной линии 116 подается выходной сигнал к входу 117 управляющего модуля 41. Этот сигнал проходит через оптический элемент 91 связи и попадает к другому входу элемента И 114. Так как в это время не приведен в действие контролирующий орган 22, то во входной линии к инвертору 113 доминирует сигнал нуля. Тем самым на выходе инвертора 113 имеется коммутационное положение "1". Это вызывает то, что все три входа элемента И 114 нагружены одним сигналом и в соответствии с этим, т.е. непосредственно после появления выходного сигнала в реле 96 давления, последовательно переключается элемент И 114 и к каскаду 115 счетчика времени подается сигнал, который задает пусковой импульс для установки времени. Если цилиндр после заданного промежутка времени, которое ему необходимо для движения штока поршня, не достигает контролирующего органа 22 и тот не срабатывает, то по истечении установленного промежутка времени передается выходной сигнал к усилителю оконечного усилительного каскада 93 и этот сигнал передается через выход 118 на сигнальные элементы 34, 36 или 87 блока 28, приспособления 35 для наблюдения и контроля и модуля наблюдения и контроля. Этот сигнал может одновременно вызывать индикацию или печать действительного неисправного состояния.
Степень увеличения числа функций наблюдения и контроля определяется соответственно степенью сложности машины и желаемым максимальным временем устранения неисправности. Можно предусматривать два или три, или четыре таких модуля 86 наблюдения и контроля соответственно только на тех технологических позициях, которые для выполнения рабочих операций на этой технологической установке нуждаются в более большом промежутке времени.
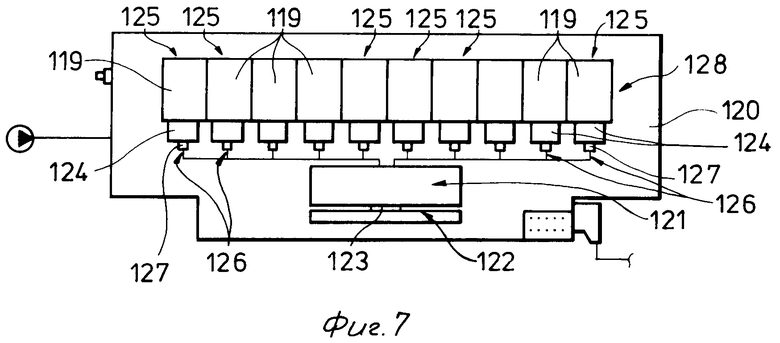
На фиг. 7 показано, что для группы клапанов 119, которые могут размещаться на общей распределительной плате 120, может быть предусмотрен только один управляющий модуль 121 с предназначенным для него контрольным модулем 122. Соединение управляющего модуля 121 с модулем 122 может осуществляться образованным многоконтактными штеккерами соединительным приспособлением 123, а соединение с приводами 124, которые вместе с клапанами 119 образуют коммутационные модули 125, может осуществляться соединительным приспособлением 126 с многоконтактными штеккерами 127. Переключательные модули 125 могут на распределительной плате 120, которая выполнена предпочтительно для установки соответственно трех, шести, девяти или десяти переключательных модулей 125, размещаться объединенно в группу 128 переключательных модулей, однако по отдельности съемно.
На фиг. 8 изображен переключательный модуль 129, который имеет опорную плату 130, в которой вмонтировано несколько приводов 131 и корпусов 132 клапанов. Приводы 131 и корпуса 132 клапанов могут, чтобы при повреждении в одном из корпусов клапанов и приводов не нужно было менять всю опорную плату 130, в данном случае также объединяться соответственно в блоки 133 и 134. В таком случае при неисправности в одном из приводов 131 следовало бы заменять или блок 133 с шестью приводами, или, если приводы 131 и корпуса 132 клапанов размещены на общей опорной плате 130, всю опорную плату 130. Это решение дает то преимущество, что по сравнению с формой выполнения согласно фиг. 2, 3 и 4 можно отходиться значительно меньшим количеством соединительных приспособлений. Тем самым может уменьшаться повреждаемость, так как прежде всего такие соединительные приспособления больше склонны к повреждениям из-за мест утечек и плохих контактов. Другое преимущество формы выполнения согласно фиг. 8 заключается в том, что при размещении соединений для соединительных линий 135 и подачи сжатого воздуха от блока 5 энергоснабжения и канала отходящего воздуха в принимающей опорную плату 130 распределительной планке 136 сборка соединительных линий и питающих сжатым воздухом и управляющих линий может осуществляться независимо от наличия коммутационных модулей 129.
Соединение опорной платы 130 и блока 133 с предназначенным для них управляющим модулем 137 осуществляется через распределительную плату 138, в которой размещены многоконтактные штеккеры 139 для соединения приводов 131 с управляющим модулем 137. Распределительная плата 138 соединена через многопроводной кабель с многоконтактным штеккером 140, который вставлен непосредственно в управляющем модуле 137 или в принимающей этот управляющий модуль опорной плате 141. Если предусмотрена опорная плата 141, то как управляющий модуль 137, так и возможно предусмотренный контрольный модуль 142 вставлены на опорной плате 141 независимо. Предусмотренные для работы машины и отдельных приспособлений контролирующие органы, например электромагнитные реле близости, ограничители и концевые выключатели или т.п., могут подсоединяться к собственной штеккерной панели 143 непосредственно на опорной плате 141. Соединение опорной платы 141 с центральным блоком 28 может осуществляться через многоконтактный штеккер и центральную соединительную линию 144. Применение опорной платы 141 для управляющего модуля 137 дает возможность сборки и изготовления соединительных линий без того, чтобы уже были смонтированы управляющий модуль 137 и контрольный модуль 142. Тем самым при профилактических работах и при необходимой замене этих модулей не нужно разъединять соединительные линии, а необходимо только вынуть неисправный модуль и вставить новый. Этим может значительно сокращаться время, необходимое для таких профилактических работ.
Чтобы выполнить управляющий модуль 137, по возможности, универсальным, можно предусмотреть в его корпусе 145 несколько сменных, т.е. съемных, печатных плат 146, так что восстановление поврежденных управляющих модулей может осуществляться проще и быстрее и корпус 145 может применяться также для управляющих модулей с различной характеристикой управления.
Следует упомянуть, что, например, корпус 147 управляющего модуля 41 (фиг. 4) может быть снабжен несколькими печатными платами 148. Кроме того, на фиг. 4 показано, как вариант, что отверстие 65 для выпуска рабочей среды и соединительное приспособление 50 не должны быть размещены непосредственно в корпусе 61 клапана и в управляющем модуле 41, а, например, могут быть размещены в распределительной плате 43, так что при замене корпуса 61 клапана не должны разъединяться связанные с отверстием 65 для выпуска рабочей среды и контролирующими органами соединительные линии.
На фиг. 6 соединенные с входами 105 и 108 управляющие линии 89 связаны через входной преобразователь 149 с центральной соединительной линией 27. Выход 118 может быть связан через выходной преобразователь 150 с центральной соединительной линией 27. Преобразователи 149, 150 могут быть выполнены в виде накопителя и преобразователя входных и выходных сигналов к и от управляющего модуля 41. В качестве входного и выходного элементов могут применяться аналого-цифровой преобразователь и преобразователь электрических сигналов в электрооптические. С помощью вышеуказанных элементов можно передавать информации в виде световых импульсов на большие расстояния и без существенных помех в соединительных приспособлениях.
Для обеспечения связанной передачи информации между управляющими модулями 41 и центральным контрольным блоком 28 между входным и выходным преобразователями 149 и 150 и центральной питающей линией 27 могут быть размещены промежуточные накопители 151 (блоки памяти).







Изобретение относится к системам управления с вычислительными блоками. Цель изобретения - упрощение конструкции и повышение надежности системы - достигается тем, что коммутационные модули с пневматическими клапанами и их электроприводами и электрические управляющие модули, а также контрольные модули устанавливаются на пневматической и электрической распределительных платах и соединяются с ними и между собой разъемами и многоконтактными штеккерами. 6 з.п. ф-лы, 8 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 3513876, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
