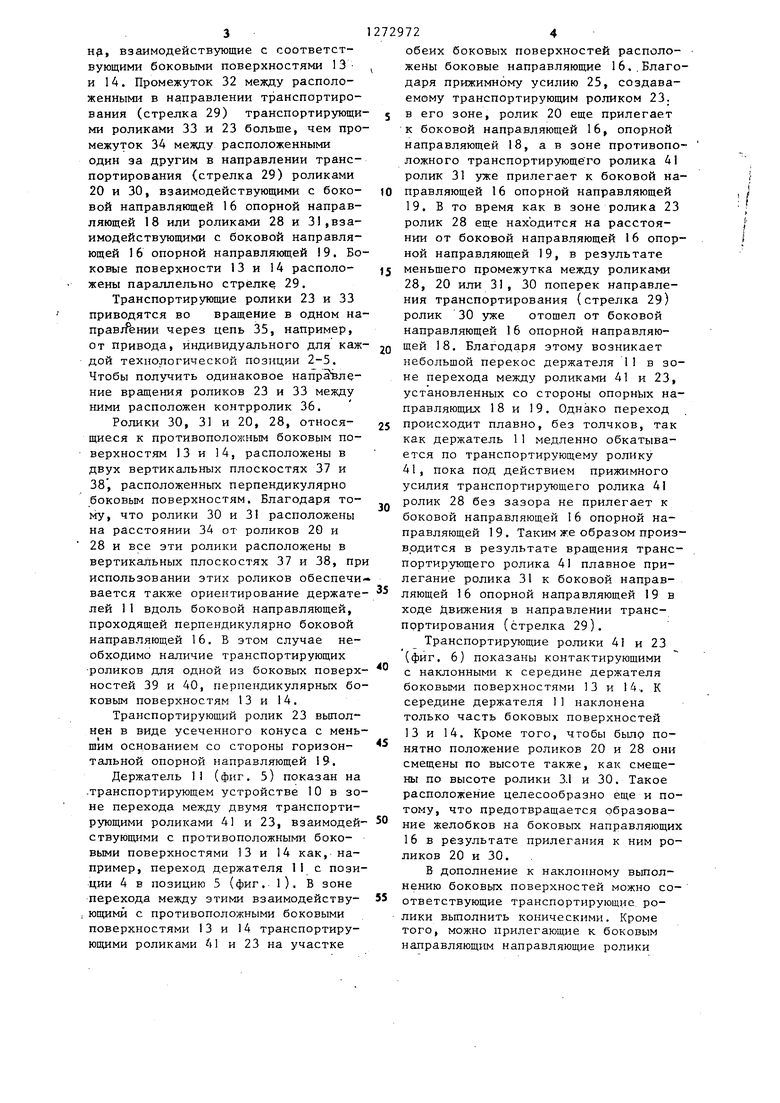
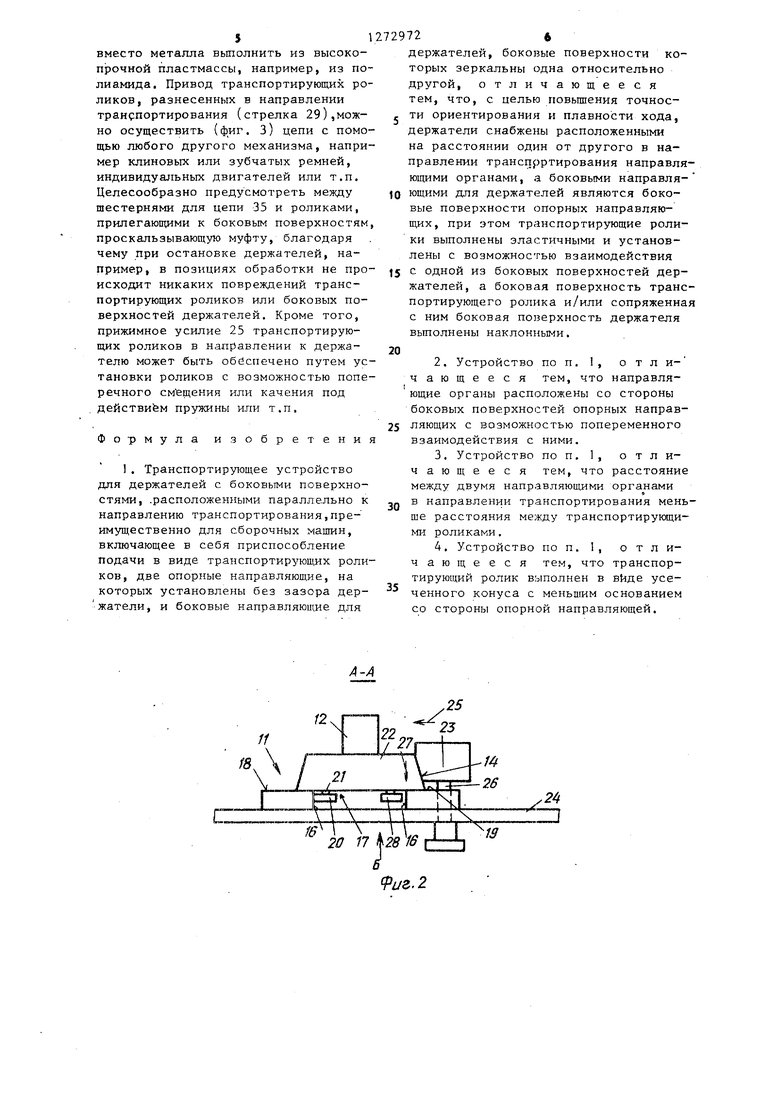
Изобретение относится к транспортному устройству для деталей или держателей деталей, предназначенному в частности, для сборочных машин, ко торое содержит два расположенных на расстоянии одно о.т другого поперек (Направления транспортирования устройства для ориентирования деталей или держателей деталей по сторонам и/или по высоте, а также механизм их подачи. Цель изобретения - повышение точности ориентирования и плавности хо да. На фиг. 1 изббражено предлагаемое транспортирующее устройство,вид сверху, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг.2 на фиг. 4 - держатель и транспортиру кядий ролик транспортирующего устройCTsaJ на фиг. 5 - держатель детали на- предлагаемом транспортирующем уст ройстве в зоне перехода между транспортирующими роликами, взаимодействующими с разными его боковыми поверхностями, вид сверху; на фиг. 6 разрез В-В на фиг. 5. Транспортирующее устройство (фиг. 1) включено в сборочную машину 1 для изготовления изделий в процессе нескольких рабочих операций, которая содержит технологические позиции 2-5, которые могут бь1ть снабжены индивидуальными.устройствами управления и энергопитания, а также устройствами 6 подачи, манипулято рами или обрабатывающими устройствами 7 и 8. Участки 9 конвейера, соответствующие отдельным технологическим позициям 2-5, образуют вместе транспортирующее устройство 10 для держателей П с деталями 12. Приспособление для бокового ориентирования деталей 12 или держателей 1 1 образовано взаимодействующим с зеркальным боковыми поверхностями 13 или 14держателей 11 приспособлением подачи и противоположной относительно этого приспособления 15 подачи боковой направляющей 16, а также вза имодействующими с ней направляющими органами 17. Направляющие органы 17 расположены на держателе 1 на расстоянии один от другого и перемещают ся без зазора по соответствующей боковой направляющей 16. Держатель 11 (фиг. 2) расположен на двух горизонтальных опорных направляющих 18 и 19, при этом боковые 72. г поверхности горизонтальных направляющих 18 и 19 образуют боковые направляющие 16 для держателей. По боковой направляющей 16 без зазора перемещается направляющий орган в виде ролика 20, например шарикоподшипника, который укреплен на оси 2, перпендикулярной основанию 22 держателя 11 и установленной в этом основании 22. Беззазорное прилегание ролика 20 к боковой направляющей 16 обеспечивается транспортирующим роликом 23,который выполнен из эластичного материала и установлен на горизонтальной опорной направляющей. 19 или на основании 24 технологической позиции 4 таким образом, что расстояние между транспортирующим роликом 23, ближайщим к держателю 11, и боковой направляющей 16 несколько меньше, чем расстояние между боковой поверхностью 14 и боковой направляющей 16. Тем самым, благодаря эластичной деформации ролика 23 создается прижимное усилие.25, действующее на держатель 11 в направлении к направляющей 16. Кроме того, боковая поверхность 14, обращенная к ролику 23, выполнена наклонной, причем расстояние между боковой кромкой 14 и осью 26 увеличивается с возрастанием расстояния от горизонтальной опорной направляющей 19. Благодаря наклонному выполнению боковой поверхности, 14 часть прижимного усилия 25 преобразуется в вертикальное усилие 27, направленное к горизонтальным опорным направляющим 18 или 19, благодаря чему обеспечивается плотное прилегание держателя 1I к горизонтальным направляющим 18 и 19. Направляющий орган в виде ролика 28, соответствующего боковой поверхности 14, находится на расстоянии от вертикальной боковой кромки горизонтальной опорной направляющей 19.Поэтому беззазорное перемещение держателя 11 обеспечивается исключительно боковой направляющей 16 и взаимодействующим с ней роликом 20. В соответствии с этим нет необходимости выполнять вертикальную боковую: кромку горизонтальной опорной направляющей 19 в виде боковой направляющей. На фиг. 3 показаны расположенные один за другим в направлении транспортирования (стрелка 29) ролики 20,30 и 28, 31 направляющего орга3Hfi, взаимодействующие с соответствующими боковыми поверхностями 13и 14. Промежуток 32 между расположенными в направлении транспортирования (стрелка 29) транспортирующи ми роликами 33 и 23 больше, чем про межуток 34 между расположенными один за другим в направлении транспортирования (стрелка 29) роликами 20 и 30, взаимодействующими с боковой направляющей 16 опорной направляющей 18 или роликами 28 и 31,взаимодействующими с боковой направляющей 16 опорной направляющей 9. Бо ковые поверхности 13 и 14 расположены параллельно стрелке 29. Транспортирующие ролики 23 и 33 приводятся во вращение в одном на прав Рении через цепь 35, например, от привода, индивидуального для каж дой технологической позиции 2-5. Чтобы получить одинаковое напра ле низ вращения роликов 23 и 33 между ними расположен контрролик 36. Ролики 30, 31 и 20, 28, относящиеся к противоположным боковым поверхностям 13 и 14, расположены в двух вертикальных плоскостях 37 и 38, расположенных перпендикулярно боковым поверхностям. Благодаря тому, что ролики 30 и 3 расположены на расстоянии 34 от роликов 20 и 28 и все эти ролики расположены в вертикальных плоскостях 37 и 38, пр использовании этих роликов обеспечи вается также ориентирование держате лей 11 вдоль боковой направляющей, проходящей перпендикулярно боковой направляющей 16. В этом случае необходимо наличие транспортирующих роликов для одной из боковых поверх ностей 39 и 40, перпендикулярных бо ковым поверхностям 13 и 14. Транспортирующий ролик 23 выполнен в виде усеченного конуса с мень шим основанием со стороны горизонташьной опорной направляющей 19. Держатель 11 (фиг. 5) показан на .транспортирующем устройстве 10 в зо не перехода между двумя транспортирующими роликами 41 и 23, взаимодей ствующими с противоположными боковыми поверхностями 13 и 14 как, например, переход держателя II с пози ции 4 в позицию 5 (фиг. 1). В зоне перехода между этими взаимодейству, ющимй с противоположными боковыми поверхностями 13 и 14 транспортирующими роликами 41 и 23 на участке 724 обеих боковых поверхностей расположены боковые направляющие 16..Благодаря прижимному усилию 25, создаваемому транспортирующим роликом 23. в его зоне, ролик 20 еще прилегает к боковой направляющей 16, опорной направляющей 18, а в зоне противоположного транспортирующего ролика 41 ролик 31 уже прилегает к боковой направляющей 16 опорной направляющей 19. В то время как в зоне ролика 23 ролик 28 еще находится на расстоянии от боковой направляющей 16 опорной направляющей 19, в результате меньшего промежутка между роликами 28, 20 или 31, 30 поперек направления транспортирования (стрелка 29) ролик 30 уже отощел от боковой направляющей 6 опорной направляющей 18. Благодаря этому возникает небольшой перекос держателя 11 в зоне перехода между роликами 41 и 23, установленных со стороны опорных направляющих 18 и 19. Однако переход происходит плавно, без толчков, так как держатель 11 медленно обкатывается по транспортирующему ролику 41, пока под действием прижимного усилия транспортирующего ролика 41 ролик 28 без зазора не прилегает к боковой направляющей I6 опорной направляющей 19. Таким же образом производится в результате вращения транспортирующего ролика 41 плавное прилегание ролика 31 к боковой направляющей 16 опорной направляющей 19 в ходе Движения в направлении транспортирования (стрелка 29). Транспортирующие ролики 41 и 23 (фиг. 6) показаны контактирующими с наклонными к середине держателя боковыми поверхностями 13 и 14. К середине держателя I1 наклонена только часть боковых поверхностей 13 и 14. Кроме того, чтобы было понятно положение роликов 20 и 28 они смещены по высоте также, как смещены по высоте ролики 3.1 и 30. Такое расположение целесообразно еще и потому, что предотвращается образование желобков на боковых направляющих 16 в результате прилегания к ним роликов 20 и 30. В дополнение к наклонному вьшолнению боковых поверхностей можно соответствующие транспортирующие ролики вьшолнить коническими. Кроме того, можно прилегающие к боковым направляющим направляющие ролики
вместо металла выполнить из высокопрочной пластмассы, например, из полиамида. Привод транспортирующих роликов, разнесенных в направлении транспортирования (стрелка 29),можно осуществить (фиг. З) цепи с помощью любого другого механизма, например клиновых или зубчатых ремней, индивидуальных двигателей или т.п. Целесообразно предусмотреть между шестернями для цепи 35 и роликами, прилегающими к боковым поверхностям, проскальзывающую муфту, благодаря чему при остановке держателей, например, в позициях обработки не происходит никаких повреждений транспортирующих роликов или боковых поверхностей держателей. Кроме того, прижимное усилие 25 транспортирующих роликов в направлении к держателю может быть обеспечено путем установки роликов с возможностью поперечного смтещения или качения под действием пружины или т.п.
Формула изобретения
1. Транспортирующее устройство для держателей с боковыми поверхностями, .расположенными параллельно к направлению транспортирования,преимущественно для сборочных машин, включающее в себя приспособление подачи в виде транспортирзюш;их роликов, две опорные направляющие, на которых установлены без зазора держатели, и боковые направляющие для
держателей, боковые поверхности которых зеркальны одна относительно другой, отличающееся тем, что, с целью повышения точности ориентирования и плавности хода, держатели снабжены расположенными на расстоянии один от другого в направлении транспрртирования направляющими органами, а боковыми направляющими для держателей являются боковые поверхности опорных направляющих, при этом транспортирующие ролики выполнены эластичными и установлены с возможностью взаимодействия
с одной из боковых поверхностей держателей, а боковая поверхность транспортирующего ролика и/или сопряженная с ним боковая поверхность держателя вьшолнены наклонными.
2.Устройство по п. 1, о т л ичающееся тем, что направляющие органы расположены со стороны боковых поверхностей опорных направляющих с возможностью попеременного взаимодействия с ними.
3.Устройство по п. 1, о т л ич ающееся тем, что расстояние между двумя направляющими органами
в направлении транспортирования меньше расстояния между транспортирукщими роликами.
4.Устройство по п. 1, отличающееся тем, что транспортирующий ролик выполнен в виде усеченного конуса с меньшим основанием со стороны опорной направляющей.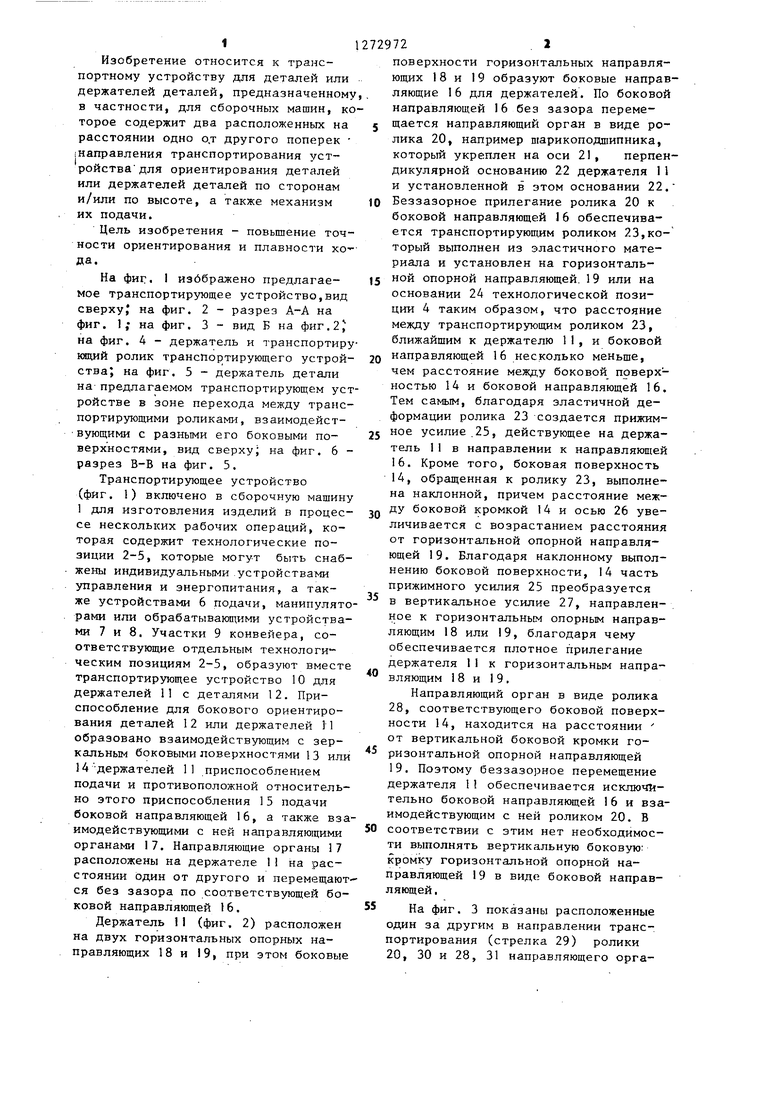
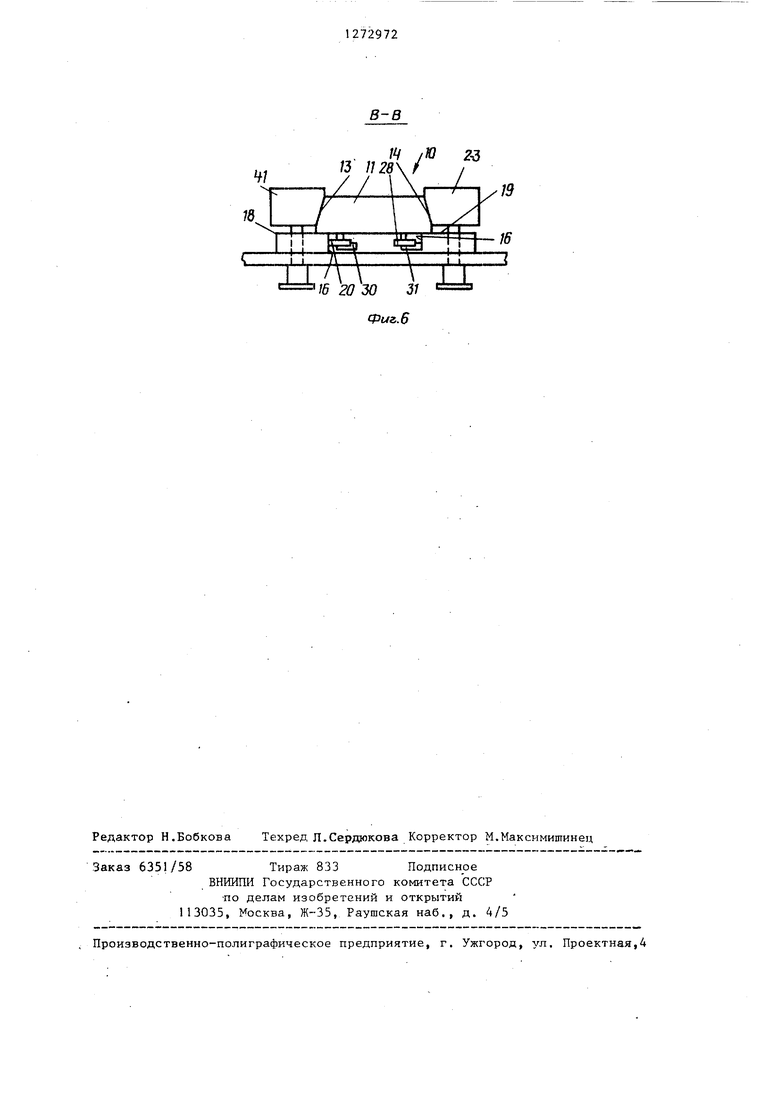
Изобретение позволяет повысить точность ориентирования и плавность хода. Для этого установленные без зазора на двух опорных направляющих (Н) держатели 11 снабжены расположенными на расстоянии один другого в направлении транспортирования направляющими органами (НО) 17. Боковые поверхности (БП) опорных Н обра1 ff 3 в (rVr 2 зуют боковые Н 16 для держателей 11, зеркальные одна другой. При этом НО 17 расположены со стороны БП опорных Н возможностью, попеременного взаимодрйствия с ними. Транспортирующий ролик выполнен эластичным и установлен с возможностью взаимодействия с одной из БП держателей I1. Благодаря эластичной его деформации создается прижимное усилие, действующее на держатель 11 в направлении к боковой Н 16. При этом БП транспортирующего родика и/или сопряженная с ним БП держателя выполнены наклонными. Благодаря этому часть прижимного усилия преобразуется в вертикальное усилие, направленное к опорным Н. Это обесО) печивает плотное прилегание держателя к опорным Н..Расстояние между двумя НО в направлении транспортирования меньще расстояния между транспортирующими роликами. Транспортирующий ролик м.б. выполнен в виде усеченного конуса с меньшим осноЬанием со стороны опогрной Н. 3 з.п. ф-лы, 6 ил.
,),|Т,,В
цг.2
11
Ю. 3
V
1620
u°
нл«
ФигМ
29
25 /
tQ 1.. i 1
i incU
/б 20 30 31
Ч /Ю 23
19
16
S Фиг.6
| СПОСОБ ВЫБОРА ТАКТИКИ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ БОЛЬНЫХ С ОБЛИТЕРИРУЮЩИМ АТЕРОСКЛЕРОЗОМ АРТЕРИЙ НИЖНИХ КОНЕЧНОСТЕЙ | 2020 |
|
RU2756422C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
