Область техники, к которой относится изобретение
Изобретение относится к приводным устройствам, в частности к электроприводным устройствам, и может быть использовано в качестве приводов антенн, телекамер, локаторов и других устройств, установленных на военной или иной специализированной технике со средствами радиосвязи.
Уровень техники
Известно устройство - механизм возвратно-поступательного перемещения, включающее приводной двигатель, редуктор, ходовой винт с втулкой, имеющей опоры конечных положений, ходовую гайку, датчики положения. Механизм возвратно-поступательного перемещения содержит приводной двигатель с валом, сопряженный с редуктором, на выходном валу которого закреплены ходовой винт с ходовой трубчатой гайкой, датчик поворота винта, а также блок управления, выходы которого соединены с входом двигателя, а вход - с выходом датчика, снабжен размещенной на свободном конце ходового винта втулкой с упорами на противоположных торцах и предохранительной муфтой, установленной на валу двигателя, при этом трубчатая гайка снабжена упорами, установленными с возможностью взаимодействия с упорами втулки, а датчик поворота винта выполнен в виде кольцевого магнита со смещенными звездообразными полюсными наконечниками и магнитоуправляемого элемента, расположенного перпендикулярно плоскости вращения полюсных наконечников (см. пат. РФ №2020545, МПК8 G05G 5/02, "Механизм возвратно-поступательного перемещения" / Лукьянов С.В. и др. // Бюл. №27, 2000).
Недостатками данного устройства являются:
- сложная кинематическая схема приводного механизма;
- позиционирование антенны не по фактическому положению, а по числу импульсов от устройства, подверженного сбою в числе импульсов;
- завышенная мощность электродвигателя;
- отсутствие устройств ручной установки антенны в нужное положение при обязательном выполнении боевой задачи в случаях:
- отказа электропривода;
- при примерзании устройства из-за низких температур.
Известно устройство–привод, содержащее корпус, в виде единой детали, установленный в нем двигатель, редуктор и датчик положения. Входная ступень редуктора выполнена в виде цилиндрической зубчатой передачи, шестерня которой установлена на валу двигателя, а зубчатое колесо - на промежуточном валу. Выходная ступень редуктора выполнена в виде червячной передачи, выходное звено которой выполнено в виде червячного сектора и жестко закреплено на выходном валу. При этом червяк червячной передачи установлен на промежуточном валу между его подшипниками, а зубчатое колесо цилиндрической зубчатой передачи размещено за пределами зоны размещения упомянутых подшипников. Шестерня и зубчатое колесо цилиндрической зубчатой передачи размещены снаружи корпуса. Датчик положения связан с выходным валом. В корпусе выполнены параллельные расточки для размещения двигателя и промежуточного вала, скрещивающаяся под прямым углом с ними расточка для размещения выходного вала, параллельная последней расточка для размещения датчика положения и между подшипниками промежуточного вала - паз для размещения червячного сектора (см. пат. РФ №2293893, МПК8 F16H 1/06, "Привод" / Белоусов Н.И. // Бюл. №5, 2007).
Недостатками данного устройства являются:
- внешнее незащищенное расположение части редуктора;
- сложная кинематическая схема приводного механизма;
- завышенная мощность электродвигателя;
- сложный датчик, связанный с входным валом через дополнительную зубчатую передачу;
- отсутствие устройств ручной установки антенны в нужное положение при обязательном выполнении боевой задачи в случаях:
- отказа электропривода;
- при примерзании устройства из-за низких температур.
Известно устройство, применяемое в настоящее время в подвижных объектах связи МО, механизм подъема антенны, содержащий коллекторный двигатель, промежуточный многоступенчатый редуктор, выходной червячный редуктор, на выходном валу червячного колеса внутри корпуса расположены оптические датчики положения, а снаружи поворотное основание, на одном из валов промежуточного редуктора установлена ручка ручного перемещения привода и отдельный пульт управления (Механизм подъема антенны (МПА) документация ШКИС.468324.003 ЭТ-ТИЯЖ 1994 г., производимый Тамбовским заводом). Многолетний опыт эксплуатации данного устройства реально показал ряд его недостатков.
Недостатками данного устройства являются:
- сложный многоступенчатый понижающий редуктор с передаточным числом порядка 1000 и червячным редуктором на выходе;
- сложная кинематическая схема приводного механизма;
- пульт управления сложный по конструкции и имеет большие габариты;
- не надежное ручное управление приводом, реализованное на промежуточной шестерне редукторной части привода, не обеспечивает обязательное выполнение боевой задачи в случаях:
- отказа в редукторе;
- при примерзании устройства из-за низких температур.
Наиболее близким, по технической сущности и достигаемому эффекту, принимаемый авторами за прототип, является устройство-механизм подъема антенны, содержащее двигатель, многоступенчатый редуктор, в том числе червячная ступень, датчики начального и конечного положения и пульт управления. Механизм подъема антенны состоит из установленного на кронштейне корпуса, размещенных в нем электродвигателя и редуктора. Входная и промежуточная ступени редуктора выполнены в виде цилиндрических зубчатых передач. Шестерня входной ступени установлена на валу электродвигателя, зубчатое колесо этой ступени и шестерня промежуточной ступени - на промежуточном валу, установленном в опорном кронштейне, на котором также закреплен электродвигатель. Зубчатое колесо промежуточной ступени зафиксировано на входном валу выходной ступени - червячном редукторе, выполненном в виде отдельного изделия, установленного на опорном кронштейне. Выходной вал червячного редуктора связан с приводным полувалом поворотного основания жесткой втулочной муфтой. Приводной полувал и опорный полувал зафиксированы в кронштейне, примыкающем к корпусу. На втулочной муфте размещен жесткий упор, связанный через пружинную пластину с датчиками начального и конечного положения антенны (см. пат. РФ №2428609, МПК8 F16H 37/04, "Механизм подъема антенны" / Громов В.В. и др. // Бюл. №25, 2011).
Недостатками данного устройства являются:
- сложная кинематическая схема приводного механизма;
- завышенная мощность электродвигателя;
- отсутствие устройств ручной установки антенны в нужное положение при обязательном выполнении боевой задачи в случаях:
- отказа электропривода;
- при примерзании устройства из-за низких температур.
Раскрытие изобретения
Задачей предлагаемого изобретения является:
- упрощение конструкции, механизма перемещения антенны;
- снижение мощности приводного электродвигателя,
- повышение работоспособности при низких температурах;
- совершенствование механизма ручной установки антенны.
Технический результат достигается с помощью устройства, содержащего пульт управления и устройство перемещения антенны, содержащее корпус с открытым и закрытым отсеками, в открытом отсеке размешено поворотное антенное основание, в закрытом отсеке размещен привод, электродвигатель, датчики положения антенны, привода, содержащего ходовой винт с перемещающейся ходовой гайкой, конец ходового винта соединен с валом электродвигателя посредством пружины кручения, на этом же конце ходового винта закреплена упорная пружина, корпус электродвигателя закреплен на поворотном основании, обеспечивающем поворот двигателя совместно с ходовым винтом, к ходовой гайке присоединены планка фиксации положения ходового винта и поворотный рычаг выходного вала привода, планка фиксации положения ходового винта имеет ось вращения, смещенную от оси выходного вала, поворотный рычаг выходного вала выполнен двухзвенным, первое звено жестко закреплено с выходным валом привода, второе - шарнирно связано с первым звеном и ходовой гайкой, выходной вал привода по оси имеет отверстие, в которое шарнирно вставлен конец приводного полувала поворотного антенного основания, в открытом отсеке выходной вал привода содержит радиальный рычаг, соединяемый с радиальным рычагом приводного полувала поворотного антенного основания размыкаемым фиксатором, опорный полувал поворотного антенного основания содержит радиальный рычаг с отверстием на конце, а внешняя стенка открытого отсека имеет отверстия для штыревого фиксирования на ней положения рычага опорного полувала поворотного антенного основания при ручной установке фиксированного положения антенны.
Краткое описание чертежей
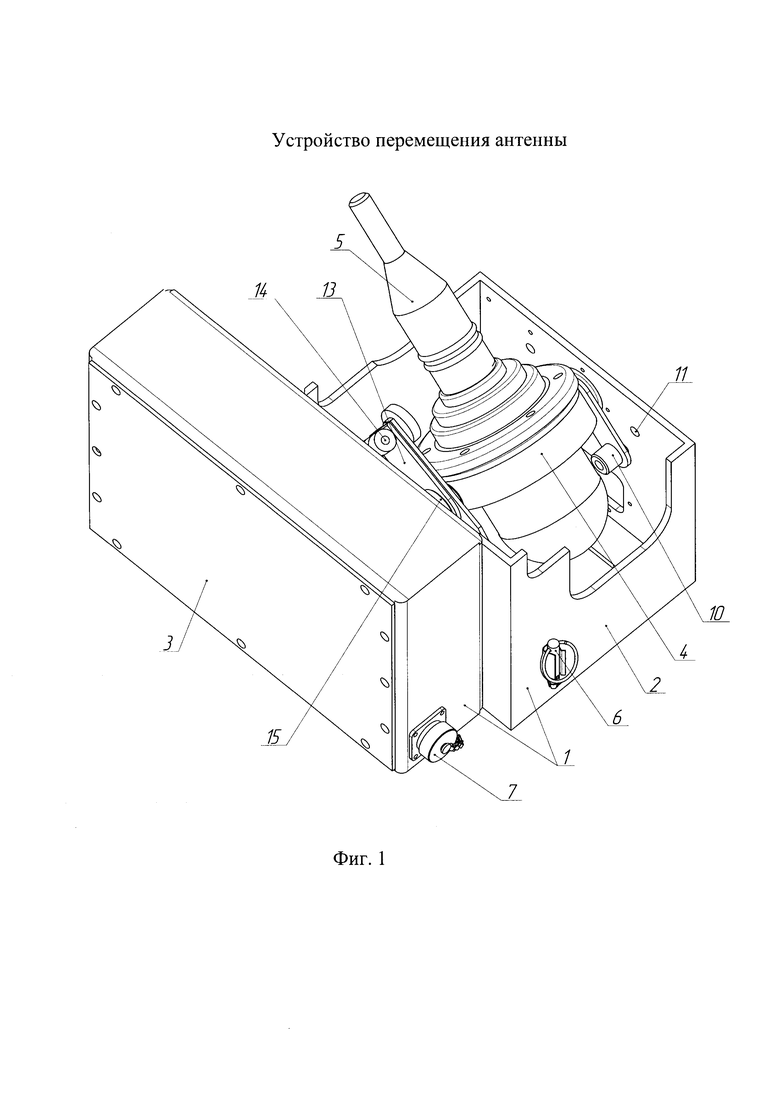
На фиг. 1 представлена конструкция устройства перемещения антенны.
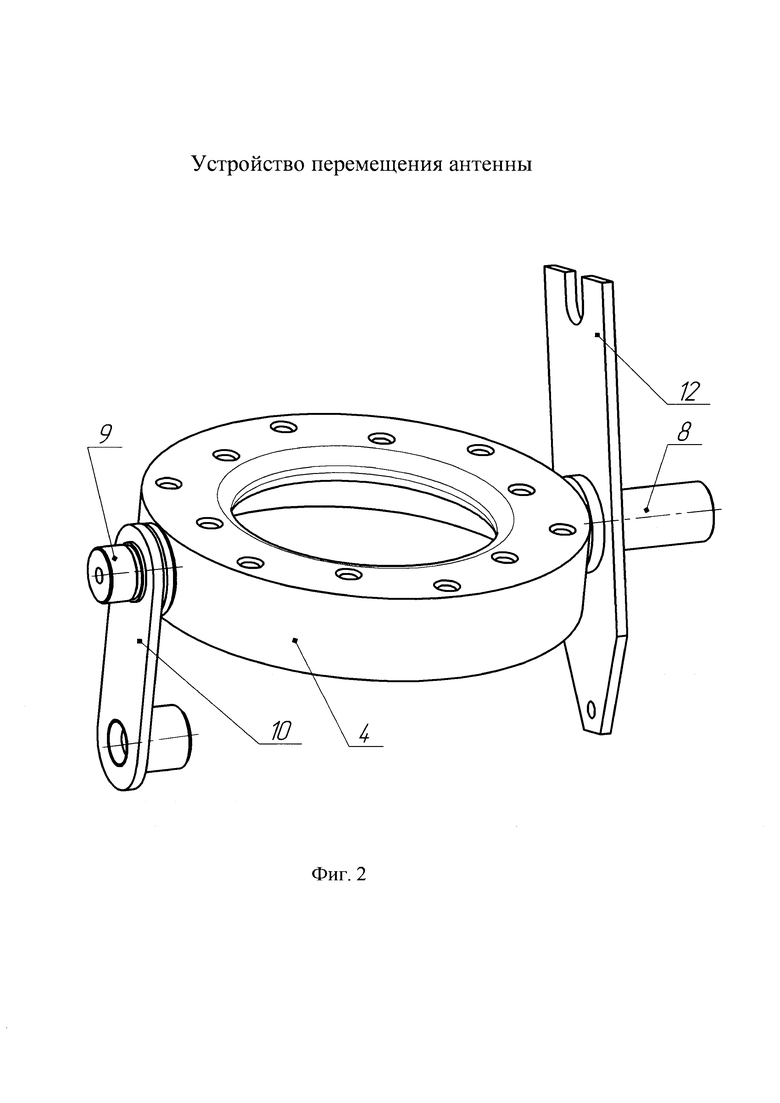
На фиг. 2 представлено поворотное антенное основание.
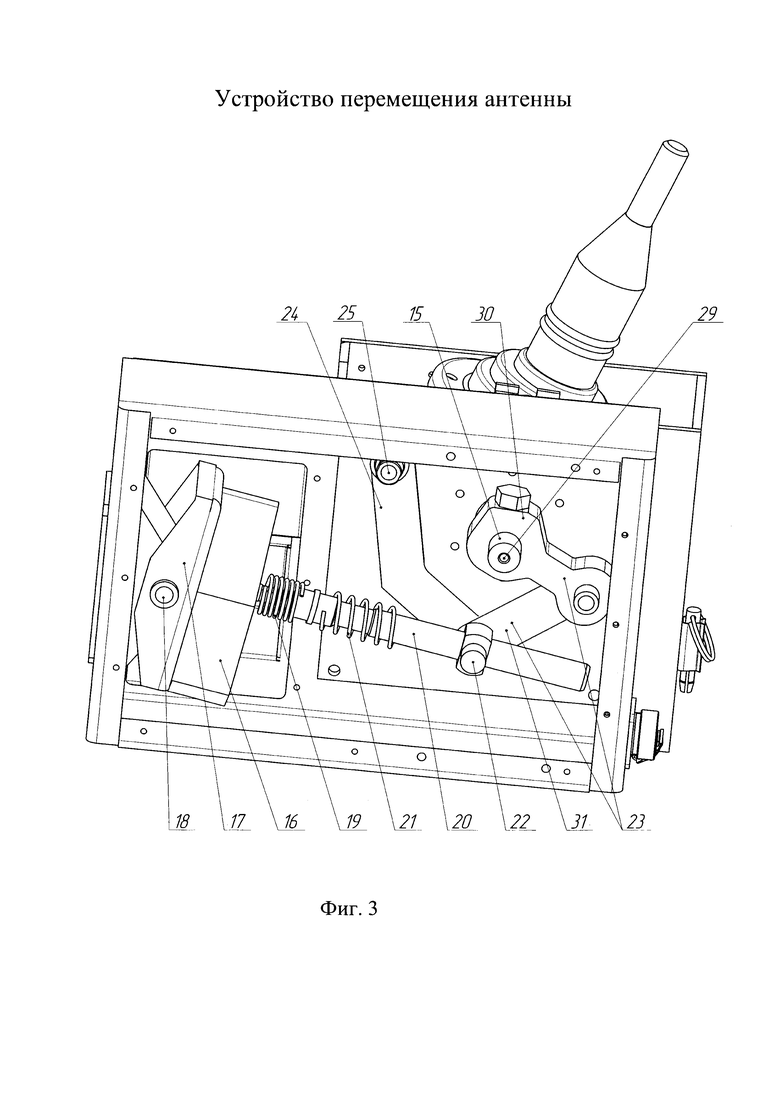
На фиг. 3 представлена конструкция привода в закрытом отсеке корпуса.
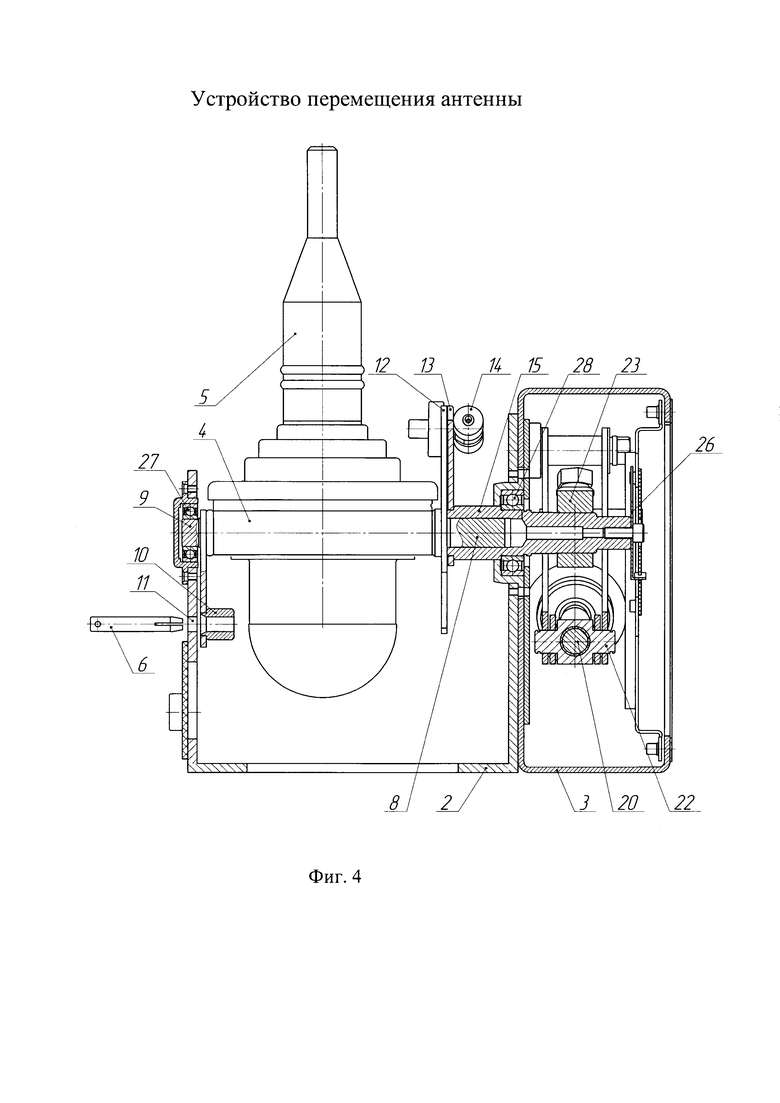
На фиг. 4 представлено сечение конструкции по оси выходного вала привода и полувалов поворотного антенного основания.
Осуществление изобретения
Механизмы перемещения антенны состоят из двух частей:
- устройства перемещения антенны;
- пульта дистанционного управления (не показано).
Устройство перемещения антенны (фиг. 1) содержит корпус 1, состоящий из открытого отсека 2 и закрытого отсека 3, жестко соединенных между собой. В открытом отсеке 2 размещено поворотное антенное основание 4, на котором крепится антенна 5. На стенке открытого отсека 2 расположен стержень 6 ручной фиксации положения поворотного антенного основания 4. На стенке закрытого отсека 3 размещен разъем 7 присоединения пульта управления (не показано).
Поворотное антенное основание 4 (фиг. 2) выполнено в виде кольца, на котором жестко диаметрально противоположно расположены приводной полувал 8 и опорный полувал 9. Конец опорного полувала 9 размещен в подшипниковой опоре 27 на внешней стенке открытого отсека 2 (фиг. 4). Опорный полувал 9 имеет жестко закрепленный радиальный рычаг 10 с отверстием на конце. На внешней стенке открытого отсека 2 (фиг. 1) по окружности выполнены отверстия 11, по радиусу и размеру совпадающие с отверстием радиального рычага 10. При совмещении отверстия 11 на стенке открытого отсека 2 и отверстия радиального рычага 10 вставляется стержень 6 (фиг. 4) для установки антенны 5 в требуемом положении при ручной установке.
На приводном полувалу 8 поворотного антенного основания 4 (фиг. 2) расположен жестко закрепленный радиальный рычаг 12. В открытый отсек 2 из закрытого отека 3 выходит конец выходного вала 15 привода. На конце выходного вала 15 привода, со стороны открытого отсека 2, жестко закреплен радиальный рычаг 13 (фиг. 1, 4). Радиальный рычаг 12 и радиальный рычаг 13 стыкуются между собой с помощью фиксатора 14, расположенного на радиальном рычаге 13. Фиксатор 14 закрепляет или разделяет между собой радиальный рычаг 12 и радиальный рычаг 13. Выходной вал 15 привода закреплен в подшипниковой опоре 28, установленной на средней стенке корпуса 1, общей стенке открытого отсека 2 и закрытого отсека 3 (фиг. 4). Выходной вал 15 привода и полувалы 8 и 9 поворотного антенного основания 4 расположены на одной оси 29. Конец приводного полувала 8 поворотного антенного основания 4 расположен в отверстии выходного вала 15 привода, в нем не зафиксирован и может свободно поворачиваться (фиг. 4).
В закрытом отсеке 3 (фиг. 3) расположен электродвигатель 16 на поворотном основании 17 с осью поворота 18, к валу электродвигателя 16 через пружину 19 кручения присоединен ходовой винт 20. На ходовом винте 20 со стороны электродвигателя 16 расположена упорная пружина 21. На ходовом винте 20 установлена ходовая гайка 22, которая в крайнем левом положении сжимает упорную пружину 21. К ходовой гайке 22 шарнирно присоединены поворотный рычаг 23 выходного вала 15 привода и планка 24 фиксации положения ходового винта 20. Поворотный рычаг 23 состоит из двух звеньев. Первое звено 30 жестко закреплено с выходным валом 15 привода, а второе звено 31 шарнирно связано с первым звеном 30 и ходовой гайкой 22. Поворотный рычаг 23 выполняет поворот выходного вала 15 привода по оси 29. Конец планки 24 поворачивается на оси вращения 25. Планка 24 фиксирует отклонение ходового винта 20 и ходовой гайки 22 от оси 29 выходного вала 15 привода. Ось вращения 25 планки 24 смещена относительно оси вращения 29 выходного вала 15 привода. Поворотный рычаг 23 выполняется из двух шарнирно связанных между собой звеньев 30 и 31 для увеличения угла поворота выходного вала 15 привода при меньшей длине ходового винта 20. При перемещении ходовой гайки 22 поворотный рычаг 23 обеспечивает изменение длины расстояния между ходовой гайкой 22 и осью вращения 29 выходного вала 15 привода. Следовательно, выполняется регулирование величины вращающего момента на выходном валу 15 привода, создаваемого электродвигателем 16. При начальном положении ходовой гайки 22 рядом с электродвигателем 16 длина расстояния между ходовой гайкой 22 и осью вращения 29 выходного вала 15 привода - наибольшая и момент вращения на выходном валу 15 - максимальный. Это положение соответствует горизонтальному расположению антенны 5. При вертикальном расположении антенны 5 момент вращения на выходном валу 15 требуется минимальный, при этом из-за перемещения ходовой гайки 22 расстояние между ходовой гайкой 22 и осью вращения 29 выходного вала 15 привода - минимальное. Заявляемое устройство с поворотным основанием 17 и двухзвенным поворотным рычагом 23 дает минимальные габариты устройства перемещения антенны 5 и требует минимальной мощности электродвигателя 16. В закрытом отсеке 3 на выходном валу 15 привода устанавливаются датчики 26 контроля положения выходного вала 15 привода и, следовательно, положения антенны 5 относительно корпуса (фиг. 4).
Устройство обеспечивает работу в двух режимах: автоматическом и ручном, следующим образом.
Режим 1. Устройство перемещения антенны обеспечивает перемещение антенны 5 электродвигателем 16 в заданное фиксированное положение автоматически с помощью дистанционного пульта управления (не показано). Антенна 5 обычно устанавливается в фиксированных положениях - горизонтальном, вертикальном или под требуемым углом наклона по условиям настройки радиоаппаратуры.
Устройство перемещения антенны в режиме автоматического управления работает следующим образом. При присоединении пульта управления (не показано) к разъему 7 устройство получает электропитание (например, от бортовой сети автомобиля). Переключателем на пульте управления задается одно из требуемых фиксированных положений антенны 5 "горизонт", "верт", "накл" (45° или 135°). На фиг. 3 показано положение всех элементов устройства для промежуточного состояния. Для примера рассмотрим работу устройства при варианте исходного положения антенны 5 в горизонтальном положении. Исходное положение ходовой гайки 22 при этом около электродвигателя 16, отклонение ходового винта 20 от выходного вала 15 - максимальное, что создает максимальную длину плеча поворотного рычага 23 и, следовательно, максимальный момент, прикладываемый к выходному валу 15 привода. Упорная пружина 21 сжата, пружина 19 кручения свободна, т.е. не скручена. Перемещение антенны 5 из горизонтального положения - самый тяжелый режим для устройства, требующий максимального момента на выходном валу 15 привода, а также максимальных мощности и момента вращения электродвигателя 16. Это обусловлено расположением суммарного груза, самой антенны 5, образованием наледи на протяженных элементах антенны 5, а также замерзанием смазки во всех шарнирных соединениях при низких температурах и, в том числе, в подшипниковых узлах электродвигателя 16. Момент сопротивления на выходном валу 15 привода имеет максимальное значение и определяет необходимые мощность и вращающий момент электродвигателя 16. Требуется переместить антенну 5 из горизонтального положения в вертикальное положение. На пульте управления переключатель положение антенны устанавливаем в положение "верт" (не показано). На электродвигатель 16 поступает питание соответствующей полярности. Электродвигатель 16 начинает вращаться, скручивая пружину 19, соединяющую вал электродвигателя 16 и ходовой винт 20. После скручивания пружины 19 приводится во вращение ходовой винт 20. Так как пружина 19 кручения в начальный момент вращения электродвигателя 16 не скручена - это позволяет электродвигателю 16 запуститься практически вхолостую. После скручивания пружины 19 вал электродвигателя 16 начинает вращение ходового винта 20. Первоначальному сдвигу ходовой гайки 22 по ходовому винту 20, помимо электродвигателя 16, способствует, предварительно сжатая, упорная пружина 21 на конце ходового винта 20 с усилием, направленным в сторону перемещения гайки 22. Это уменьшает необходимый момент вращения и мощность электродвигателя 16 по первоначальному сдвигу с места ходовой гайки 22. Ходовой винт 20, вращаясь, перемещает ходовую гайку 22 вдоль ходового винта 20 и перемещает конец второго звена 31 поворотного рычага 23 и конец планки 24. Рычаг поворота 23 выполняет поворот выходного вала 15 привода до нужного вертикального положения антенны 5. При перемещении ходовой гайки 22 поворотный рычаг 23 уменьшает расстояние между ходовой гайкой 22 и осью вращения 29 выходного вала 15 привода, то есть плечо эквивалентного рычага, так как угол между звеньями 30 и 31 поворотного рычага 23 уменьшается. При достижении антенной 5 вертикального положения срабатывает соответствующий датчик положения 26 и выключает электродвигатель 16. Планка 24 производит удержание поворотного рычага 23 в соответствующем положении. По мере подъема антенны суммарный момент сопротивления уменьшается и потребляемая мощность электродвигателя 16 снижается. По сигналу датчика положения 26 выходного вала 15 электродвигатель 16 отключается и останавливает привод и соответственно антенну 5 в вертикальном положении. Таким образом, с помощью дополнительных пружины 19 кручения и упорной пружины 21 на ходовом винте 20 осуществляется облегченный пуск электродвигателя 16, что особо важно в условиях низкой температуры окружающей среды, способствующей примерзанию во всех осях вращения привода и на рабочих поверхностях ходового винта 20 и гайки 22. Перемещения антенны 5 в другие положения не вызывают подобных проблем, так как в других положениях суммарные моменты сопротивления значительно меньше и требуемые моменты вращения и мощности электродвигателя 16 минимальны из-за положения груза и удаления замерзших участков смазки. При перемещении из вертикального положения антенна 5 своим весом создает дополнительное согласное усилие, уменьшая нагрузку на электродвигатель 16. При возврате антенны 5 из вертикального положения в горизонтальное положение ходовая гайка 22 в конце перемещения сжимает упорную пружину 21, подготавливая ее состояние к обратному процессу движения. При возврате антенны 5 в горизонтальное положение, поскольку электродвигатель 16 вращается в противоположном направлении, происходит раскручивание пружины 19 кручения между валом электродвигателя 16 и ходовым винтом 20, подготавливая процесс очередного облегченного пуска электродвигателя 16.
При низких температурах все подвижные части привода имеют повышенный момент сопротивления из-за замерзания смазки и увеличенного коэффициента трения покоя. В предлагаемом устройстве пуск электродвигателя 16 осуществляется практически при нулевом моменте сопротивления механизма за счет пружины 19 кручения между двигателем 16 и ходовым винтом 20. Электродвигатель 16 преодолевает момент сопротивления только в собственных подшипниках. При начальном подъеме антенны 5 из горизонтального положения создается максимальная нагрузка на электродвигатель 16. Наличие предварительно сжатой упорной пружины 21 создает дополнительное усилие, совпадающее по направлению с усилием, создаваемым электродвигателем 16, что уменьшает требуемый момент на валу электродвигателя 16. Все эти дополнения позволяют минимизировать потребную мощность и габариты электродвигателя 16, уменьшить длину ходового винта 20, габариты устройства, уменьшить потребление энергии от бортовой сети транспортного средства, обеспечить устойчивую работу устройства в режиме дистанционного управления с пульта.
Применение поворотного основания 17, ходового винта 20 с ходовой гайкой 22 и поворотного рычага 23, состоящего из двух звеньев 30 и 31, упрощает и удешевляет конструкцию привода по сравнению с червячным редуктором. В аналогах и прототипе применяется червячный редуктор на выходе привода.
Режим 2. При отказе по какой-либо причине системы автоматического перемещения антенны устройство обеспечивает независимый ручной режим установки антенны 5 в соответствующее положение.
Устройство в режиме ручного управления работает следующим образом. Фиксатором 14 производится расстыковка рычага 12 приводного полувала 8 поворотного антенного основания 4 и рычага 13 выходного вала 15 привода (фиг. 1, 4). Перемещают поворотное антенное основание 4 в требуемое положение до совпадения отверстия рычага 10 и отверстия 11 на внешней стенке открытого отсека 2 (фиг. 4). В эти отверстия, совпавшие по положению, вставляется стержень 6, закрепляющий положение поворотного антенного основания 4 и соответственно антенны 5 в требуемом положении. Возврат к дистанционному управлению осуществляется в обратном порядке. Из отверстия 11 удаляется стержень 6, поворотное антенное основание 4 перемещают до совпадения положений рычага 12 приводного полувала 8 поворотного основания 4 и рычага 13 выходного вала 15 привода, закрепляют их взаимное положение фиксатором 14. Устройство готово для работы с управлением от пульта управления.
Отличительной положительной особенностью заявляемого устройства является полностью механическое разделение выходного вала 15 привода и приводного полувала 8 поворотного антенного основания 4. В аналогах и прототипе вал поворотного антенного основания жестко связан с выходным валом 15 привода и их разделение невозможно. В аналогах и прототипе ручной привод перемещения антенны либо отсутствует, или реализован на промежуточных шестернях редуктора, что снижает надежность и может при внутренних повреждениях сделать режим ручной установки не осуществимым.
Опыт изготовления и эксплуатации заявляемого устройства в течение трех лет подтвердил преимущества заявляемого устройства, проявившееся в следующем:
- упрошена технология изготовления и конструкция устройства;
- повышена надежность и безотказность в работе;
- повышена работоспособность при низких температурах;
- уменьшена мощность электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подъема антенн | 2018 |
|
RU2711765C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| МЕХАНИЗМ ПОДЪЕМА АНТЕННЫ | 2010 |
|
RU2428609C1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2014 |
|
RU2551695C1 |
| Станок для заварки стеклозаготовок | 1979 |
|
SU870362A1 |
| ШЛАГБАУМ | 2021 |
|
RU2760100C1 |
| Устройство для подачи брусков под пакет листов | 1990 |
|
SU1819714A1 |
| ТРЕХВАЛКОВАЯ ЛИСТОГИБОЧНАЯ МАШИНА | 2001 |
|
RU2200070C1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
Изобретение относится к средствам автоматизации и механизации устройств перемещения антенн стационарных и мобильных средств связи. Устройство содержит электродвигатель на поворотном основании, ходовой винт, который через пружину кручения соединен с валом электродвигателя, на конце вала ходового винта расположена упорная пружина, подвижная ходовая гайка шарнирно соединена с двухзвенным поворотным рычагом выходного вала привода и планкой фиксации отклонения положения ходового винта, поворотное антенное основание снабжено механизмом расцепления с выходным валом привода и фиксирования поворотного антенного основания на корпусе. Технический результат заключается в упрощении конструкции механизма перемещения антенны, возможности снижения мощности приводного электродвигателя, повышении работоспособности при низких температурах и совершенствовании механизма ручной установки антенны. 4 ил.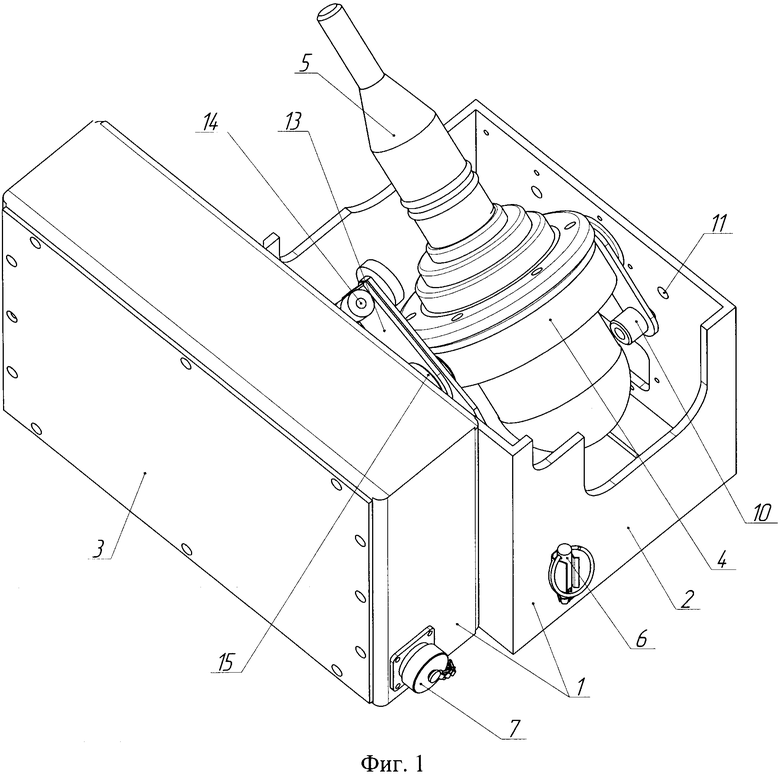
Устройство перемещения антенны, содержащее механизм перемещения, пульт управления с кабельным соединением, корпус с открытым и закрытым отсеками, в открытом отсеке размещено поворотное антенное основание, в закрытом отсеке размещен привод, электродвигатель, датчики положения антенны, отличающееся тем, что привод содержит ходовой винт с перемещающейся ходовой гайкой, конец ходового винта соединен с валом электродвигателя посредством пружины кручения, на этом же конце ходового винта закреплена упорная пружина, корпус электродвигателя закреплен на поворотном основании, обеспечивающем поворот двигателя совместно с ходовым винтом, к ходовой гайке шарнирно присоединены планка фиксации положения ходового винта и поворотный рычаг выходного вала привода, планка фиксации положения ходового винта имеет ось вращения, смещенную от оси вращения выходного вала привода, поворотный рычаг выходного вала выполнен двухзвенным, первое звено жестко закреплено с выходным валом, второе - шарнирно связано с первым звеном и ходовой гайкой, а выходной вал привода по оси имеет отверстие, в которое шарнирно вставлен конец приводного полувала поворотного антенного основания, в открытом отсеке выходной вал привода содержит радиальный рычаг, соединяемый с радиальным рычагом приводного полувала поворотного антенного основания размыкаемым фиксатором, опорный полувал поворотного антенного основания содержит радиальный рычаг с отверстием на конце, на внешней стенке открытого отсека выполнены отверстия, совпадающие по радиусу и размеру с отверстием рычага опорного полувала поворотного антенного основания, для фиксирования положения рычага опорного полувала поворотного антенного основания штырем при ручной установке положения антенны.
| МЕХАНИЗМ ПОДЪЕМА АНТЕННЫ | 2010 |
|
RU2428609C1 |
| МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2020545C1 |
| US 4663635 A1, 05.05.1987 | |||
| RU 2052895 C1, 20.01.1996 | |||
| US 20150097743 A1, 09.04.2015. | |||

