Изобретение относится к механизмам для пространственной ориентации объектов.
Известно устройство для поворота антенны в двух взаимно перпендикулярных плоскостях, содержащее внутреннюю и внешнюю взаимно перпендикулярные рамки, кинематически связанные с автономными приводными двигателями.
Известное устройство ориентации антенны относительно движущегося объекта не обеспечивает выборку ошибки, связанной с неточностью взаимного углового расположения осей вращения рамок, так как такая установка с неточностью до нескольких угловых минут требует для выборки ошибки близких к нулю значений требуемой скорости в диапазоне регулирования по оси внешней рамки при угломестном перемещении антенны. Такое регулирование потребовало бы большой редукции скорости приводного двигателя по внешней оси, поэтому эта скорость берется равной нулю, т.е. не регулируется, следовательно, ошибка остается.
Целью изобретения является повышение точности ориентации антенны относительно движущегося объекта путем увеличения уровня скоростного диапазона привода.
Это достигается тем, что устройство ориентации антенны содержит связанные с автономными приводами внешнюю и внутреннюю рамки, оси которых расположены неортогонально, причем неортогональность составляет 3-10о, что позволяет устранить указанную ошибку ориентации антенны, поскольку при неортогональной установке осей многократно возрастает требуемая скорость по внешней оси, и отработка этой скорости двигателем привода, приводящая к выборке ошибки, становится возможной.
Предложенное техническое решение соответствует критерию "Новизна", поскольку заявителю неизвестно техническое решение, характеризуемое совокупностью признаков, совпадающих с заявленной совокупностью существенных признаков или тождественных ей.
Предложенное техническое решение отвечает критерию "Существенные отличия", поскольку заявителю неизвестны технические решения с признаками, совпадающими с заявленной совокупностью существенных признаков, которые были бы функционально самостоятельными и обеспечивали бы достижение тех же положительных эффектов.
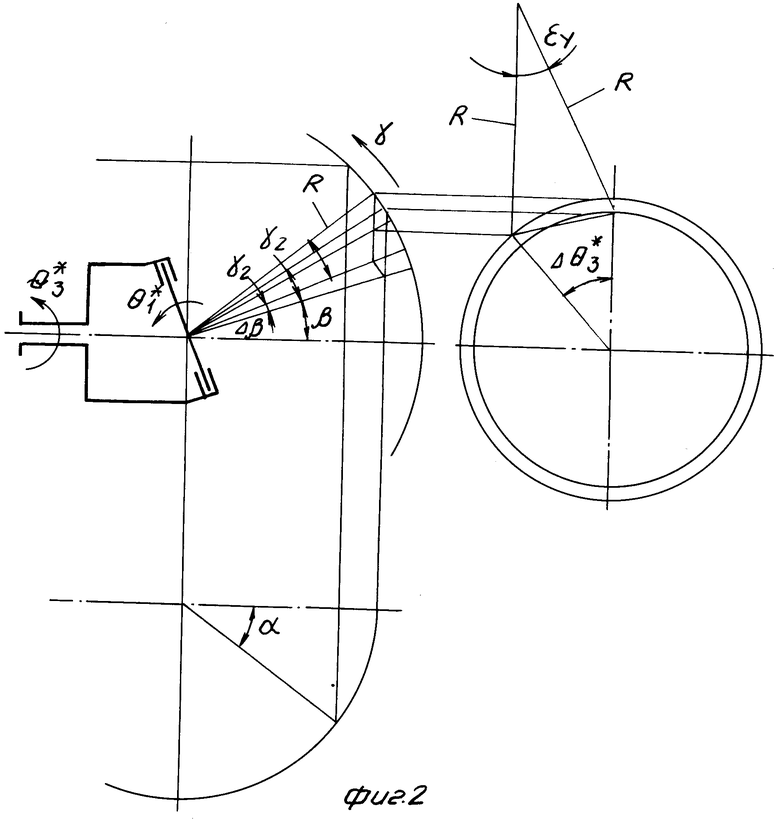
На фиг.1 изображено предложенное устройство; на фиг.2 представлена его плоская схема.
Антенна 1 установлена на внутренней рамке 2, имеющей возможность поворота относительно оси 3, жестко закрепленной в рамке 4, имеющей возможность поворота вокруг оси 5, установленной жестко в корпусе 6. Внешняя ось 5 и внутренняя ось 3 устройства расположены неортогонально и кинематически связаны с автономными приводами (на чертеже не показано).
Установка осей 3,5 с неортогональностью от 3 до 10о, т.е. сообразно требуемому начальному углу места, позволяет свести к нулю влияние неточности угла установки внешней и внутренней осей при ориентации антенны по отношению к движущемуся объекту.
Ошибка наведения εγ антенны (см. фиг.2) определяется согласно формуле
εγ = 2 arcsin  , (1) где γ1* = γ1 + β1 , γ2* = γ2 + β2 , γ1* и γ2* - углы поворота антенны для неортогональностей β1 = β и β2 = β + Δ β;
, (1) где γ1* = γ1 + β1 , γ2* = γ2 + β2 , γ1* и γ2* - углы поворота антенны для неортогональностей β1 = β и β2 = β + Δ β;
Δ β - погрешность при установке осей по углу β.
Для определения Δ θ3* в выражении (1) решаются уравнения:
γ1,2 = arccos  , (2) (θ
, (2) (θ , (3) после чего получим для выражения (1)
, (3) после чего получим для выражения (1)
Δ θ3* = ( θ3*)1 - ( θ3*)2. (4)
Согласно формулам (2) и (3) имеем координатное преобразование к θ1*и θ3*, посредством которых реализуется угол места γ*. Перемещение по γ может также сопровождаться поворотом антенны на некоторый угол α по азимуту (см. фиг.2), для чего потребуется дополнительный поворот на угол θ3**.
θ , (5) где γ 0* - начальное значение угла места;
, (5) где γ 0* - начальное значение угла места;
γ* - значение угла места, обеспечивающее поворот на угол α , который равен
α = arccos  . Аналогично выражению (4) для Δ θ3** имеем согласно выражению (5)
. Аналогично выражению (4) для Δ θ3** имеем согласно выражению (5)
Δ θ3** = (θ3**)1 - (θ3**)2. Ошибка наведения с учетом азимутального перемещения будет равна
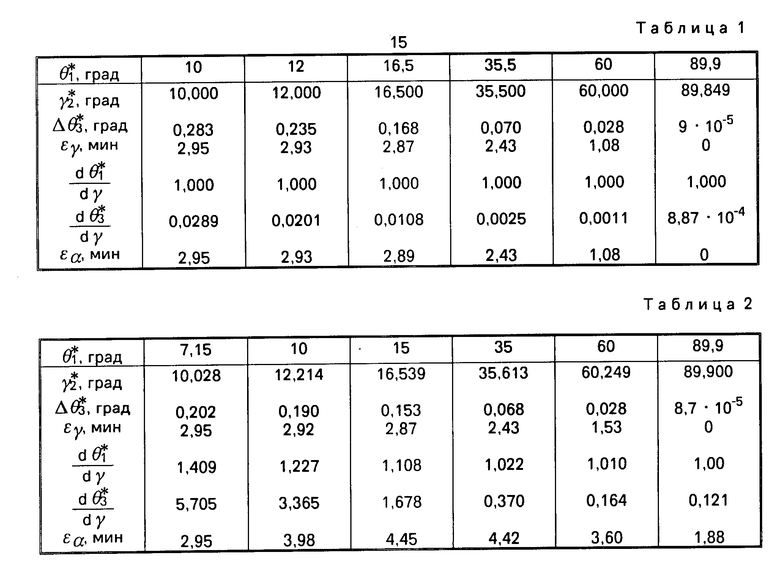
εα = 2arcsin  (6) Значения азимутальных ошибок, вычисленных по формуле (6), приведены в табл.1 и 2.
(6) Значения азимутальных ошибок, вычисленных по формуле (6), приведены в табл.1 и 2.
Скорости по координатам θ1* и θ3*, определяющие выбор двигателей, находятся из условия =
= 
 ,
,  =
= 
 , что следует из условия дифференцирования (2) и (3) по времени t, и где
, что следует из условия дифференцирования (2) и (3) по времени t, и где  и
и  являются коэффициентами передачи, определяющими скорости по осям
являются коэффициентами передачи, определяющими скорости по осям  и
и  через скорость
через скорость  объекта, на который направлена антенна. Коэффициенты
объекта, на который направлена антенна. Коэффициенты  и
и  изменяются независимо от скорости
изменяются независимо от скорости  и могут быть определены путем дифференцирования (2) и (3) по γ.
и могут быть определены путем дифференцирования (2) и (3) по γ.
В табл.1 и 2 приведены значения  и
и  для взятых в качестве примера β2 = 0,05о (табл.1) и β2 = 7,05о (табл.2), в то время как номинальная установка соответствует β1 = 0 и β1 = 7,00, т.е. в обоих случаях Δ β= 0,05о = 3'.
для взятых в качестве примера β2 = 0,05о (табл.1) и β2 = 7,05о (табл.2), в то время как номинальная установка соответствует β1 = 0 и β1 = 7,00, т.е. в обоих случаях Δ β= 0,05о = 3'.
Преобразование координат согласно выражениям (2) и (3), а также по- лученные отсюда коэффициенты передачи  и
и  вводятся в ЭВМ с соответствующей установкой β в этих выражениях, а именно: β2 = 0,05 и β2= 7,05, что сводит ε к 0, т.е. компенсирует ошибку установки Δ β в механизме. Но если при β2 = 7,05 регулирование ε возможно, то при ортогональной установке осей механизма, когда присутствует только ошибка Δ β = β2 = 0,05, регулирование будет нецелесообразно вследствие большой редукции. Согласно табл.1 и 2, большое различие значений коэффициентов
вводятся в ЭВМ с соответствующей установкой β в этих выражениях, а именно: β2 = 0,05 и β2= 7,05, что сводит ε к 0, т.е. компенсирует ошибку установки Δ β в механизме. Но если при β2 = 7,05 регулирование ε возможно, то при ортогональной установке осей механизма, когда присутствует только ошибка Δ β = β2 = 0,05, регулирование будет нецелесообразно вследствие большой редукции. Согласно табл.1 и 2, большое различие значений коэффициентов  , которые для β2 = 0,05 во всем диапазоне от 0,0289 до 8,87 ˙ 10-4 близки к нулю, делает предпочтительным неортогональную установку осей, в данном случае с β2 = 7,05, когда диапазон от 5,705 до 0,121 в десятки раз выше. В случае с β2 = 0,05 для того, чтобы обеспечить скорость
, которые для β2 = 0,05 во всем диапазоне от 0,0289 до 8,87 ˙ 10-4 близки к нулю, делает предпочтительным неортогональную установку осей, в данном случае с β2 = 7,05, когда диапазон от 5,705 до 0,121 в десятки раз выше. В случае с β2 = 0,05 для того, чтобы обеспечить скорость  =
= 
 , которая также близка к нулю, требуется передача от двигателя через редуктор с большим передаточным числом.
, которая также близка к нулю, требуется передача от двигателя через редуктор с большим передаточным числом.
Например, при заданной скорости  = 10о/с = 0,0277 об/с для β2 = 7,05 и γ2* = γ2 + β2 = 10,028 (см табл.2) будем иметь соответствующую
= 10о/с = 0,0277 об/с для β2 = 7,05 и γ2* = γ2 + β2 = 10,028 (см табл.2) будем иметь соответствующую  скорость по оси θ3*, равную:
скорость по оси θ3*, равную: =
= 
 = 5.705·0.0277 = 0.158 об/с Эта скорость может быть обеспечена без редукции путем регулировки в самом двигателе, т.е. имеем скорость двигателя n = 0,158 об/с. Изменение этой скорости в диапазоне от 5,705 до 0,121 (см. табл.2) приведет к выборке ошибки установки Δ β = 0,05о = 3', если в преобразовании координат (2) задать β2 = 7,05.
= 5.705·0.0277 = 0.158 об/с Эта скорость может быть обеспечена без редукции путем регулировки в самом двигателе, т.е. имеем скорость двигателя n = 0,158 об/с. Изменение этой скорости в диапазоне от 5,705 до 0,121 (см. табл.2) приведет к выборке ошибки установки Δ β = 0,05о = 3', если в преобразовании координат (2) задать β2 = 7,05.
В том случае, когда β2 = 0,05, получим скорость  = 0,0289 ˙ 0,0277 = 8 ˙ 10-4 об/с, которую трудно обеспечить без редукции, или же, чтобы иметь ту же скорость, что и при β2 = 7,05о, вводить редуктор с передаточным числом i =
= 0,0289 ˙ 0,0277 = 8 ˙ 10-4 об/с, которую трудно обеспечить без редукции, или же, чтобы иметь ту же скорость, что и при β2 = 7,05о, вводить редуктор с передаточным числом i =  = 197.5. Целесообразно брать i = 1, что соответствует β2 = 7,05.
= 197.5. Целесообразно брать i = 1, что соответствует β2 = 7,05.
Представленная в табл.2, зависимость ошибки наведения антенны от угла места γ* связана с фактическим значением неортогональности β2 = 7,05о в механизме вместо предполагаемого номинального значения β1 = 7,00о, которое первоначально заложено в преобразовании координат (2). Заменив в (2) β1 = 7,00 на β1 = 7,05, т.е. взяв β1 = β2, получим γ2 = γ1 , Δ θ3* = 0 и ошибку ε = 0.
Предлагаемое устройство с неортогонально расположенными осями позволяет устранить ошибки, связанные с неточностью угловой установки осей и проявляющиеся при ориентации антенны по отношению к движущемуся объекту.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| СПОСОБ ОБЗОРА ВОЗДУШНОГО ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ С ПЛОСКИМ ЛУЧОМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1996 |
|
RU2096802C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СИСТЕМА УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ | 2007 |
|
RU2361726C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2014 |
|
RU2556699C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, КОРРЕКТИРУЕМАЯ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668659C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668658C1 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ РАДИОЛОКАЦИОННЫХ СИСТЕМ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2586966C1 |
Использование: мезанизмы для пространственной ориентации объектов. Сущность изобретения: устройство содержит взаимно перекрещивающиеся оси 3, 5, установленные на внутренней 4 и внешней 2 рамках. Оси рамок расположены неортогонально, причем неортогональность осей составляет 3 - 10°. 2 ил, 2 табл.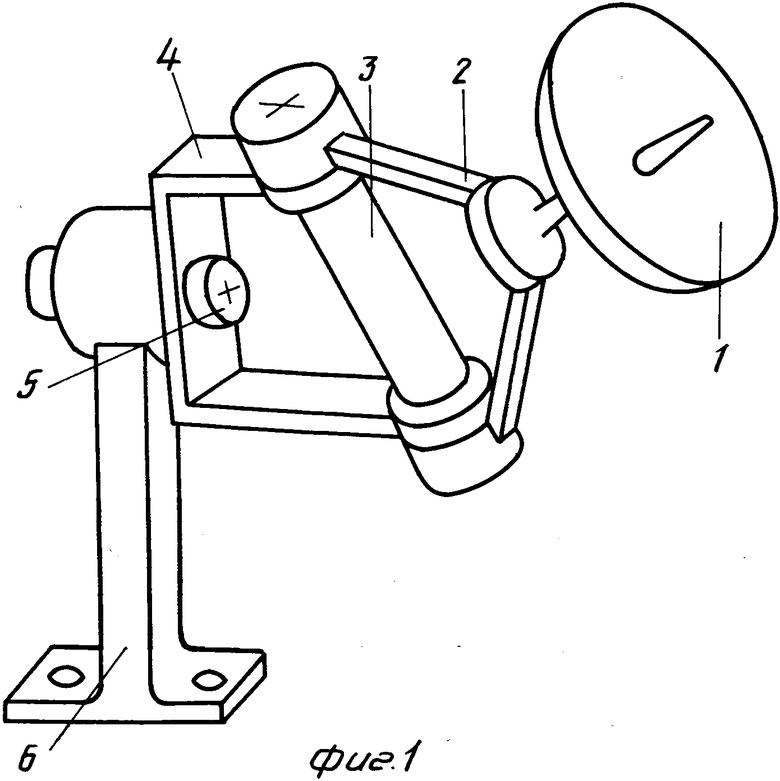
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ В ДВУХ ПЛОСКОСТЯХ, содержащее внутреннюю и внешнюю рамки с взаимно перекрещивающимися осями, кинематически связанные с автономными приводами, отличающееся тем, что, с целью улучшения точности ориентации антенны относительно движущегося объекта путем увеличения уровня скоростного диапазона привода, оси внутренней и внешней рамок расположены неортогонально, причем неортогональность осей составляет 3 - 10o.
| Куркин В.И | |||
| и Козинцов Б.С | |||
| Детали механизмов радиоустройств | |||
| М.: Высшая школа, 1988, с.227, рис.8.3 |
