Изобретение относится к области радиолокации и может быть использовано в РЛС для контроля воздушного пространства и управления воздушным движением.
Процесс контроля воздушного пространства заключается в его обзоре с помощью РЛС, обнаружении объектов и измерении их координат, а процесс управления в назначении эшелона (высоты) полета, параметров трасс движения объектов через контролируемое пространство и в проверке выполнения объектами назначенных параметров.
Для обеспечения этих функций необходимо знание текущих координат объектов азимута, дальности и высоты полета, причем измерение азимута и дальности должно проводиться непрерывно, а высоты эпизодически (при смене эшелона, при входе объекта в зону с интенсивным воздушным движением, с гористым рельефом местности, при обнаружении маневра объекта по высоте и т.д.). В зонах с невысокой плотностью движения эти функции может обеспечивать одна РЛС.
Классическим способом обзора воздушного пространства является последовательный обзор РЛС, имеющей игольчатую форму ДНА [1, с. 148; 2, с. 72] При этом дальность определяется по времени запаздывания приема отраженного сигнала, а азимут и угол места, по которому затем вычисляют высоту по известной дальности, определяют по угловому положению луча антенны, при котором обнаружен объект. Игольчатый луч можно реализовать в коротковолновом, например, S-диапазоне [2, с. 16]
Недостаток способа состоит в том, что в S-диапазоне трудно обнаруживаются малозаметные объекты, под которыми имеются ввиду как летательные аппараты с малыми линейными размерами, так и объекты, созданные по технологии, обеспечивающей их слабую радиозаметность, например по технологии Stealth (Interavia, 1987, IV, с. 331-333).
Этого недостатка лишен способ обзора пространства длинноволновой РЛС, поскольку отражающая поверхность малозаметных объектов, например, в УВЧ-диапазоне в несколько раз выше, чем в S-диапазоне (БИНТИ N 46 (2291), ТАСС 12.11.86). Но в длинноволновом диапазоне трудно получить игольчатую форму луча ДНА (диаграммы направленности антенны), поскольку для этого требуется большая площадь раскрыва антенны (сотни м2).
Известен способ обзора пространства РЛС с плоскими лучами ДНА, основанный на поочередном осмотре пространства двумя РЛС, одна из которых имеет плоский луч в вертикальной плоскости (поисковая РЛС кругового обзора), а другая в горизонтальной (РЛС для определения угла места или высотомер) [1, с. 68]
С помощью поисковой РЛС обнаруживают объект, определяют дальность до него и азимут, после чего в этом направлении ориентируют ДНА высотомера и просматривают его в пределах углов места, где реально может находиться обнаруженный объект.
Недостатки этого способа состоят в следующем:
необходимости иметь в пункте контроля воздушным движением две РЛС,
неоднозначности определения угла места объекта, если в пределах азимутального размера ДНА высотомера находится несколько объектов на одинаковых дальностях,
выпадении из-под контроля при воздействии помех (например, от телецентра) объема пространства, равного суммарному объему двух лучей.
Наиболее близким техническим решением к изобретению является способ обзора пространства РЛС с синтезированной апертурой антенны, применяемый в самолетных РЛС для картографирования земной поверхности [2, т. 2, с.337]
Принцип работы РЛС с синтезированной апертурой основан на создании эквивалентной апертуры антенны с увеличенной эффективной длиной. Это достигается путем последовательного просмотра участка пространства при различных положениях луча ДНА и совместной обработки результатов просмотра. Поскольку в процессе работы РЛС самолет прямолинейно перемещается относительно земли, то и антенна последовательно перемещается от точки к точке по траектории полета. Если запомнить отраженные сигналы, принимаемые в интервале времени Δt последовательно в этих точках, совмещать их во времени, то можно получить картину, эквивалентную обучению поверхности земли антенной с размером апертуры, равным расстоянию, на которое перемещается антенна РЛС за время Δt. Это обеспечивает увеличение точности измерения и разрешающей способности по координате, по которой перемещается луч антенны РЛС, т.е. при плоской форме ДНА в процессе синтезирования апертуры будет получена ДНА, эквивалентная игольчатой ДНА.
Недостаток этого способа состоит в том, что его трудно реализовать в наземной РЛС для обеспечения измерения угла места объекта. Для этого необходимо было бы в процессе азимутального вращения перемещать антенну РЛС вверх-вниз на сотни метров.
Заявляемое изобретение направлено на решение следующей задачи: на основе последовательного осмотра участков воздушного пространства при различных положениях плоской ДНА, занимаемых при ее азимутальном перемещении, и совместной обработке результатов просмотра обеспечить измерение высоты объекта. Эта задача решается путем последовательного образования положения лучей ДНА, которые при совмещении их во времени создают области пересечения.
Указанный результат достигается тем, что в способе обзора пространства РЛС с плоским лучом диаграммы направленности антенны, основанном на последовательном просмотре участка пространства при различных положениях лучей ДНА и совместной обработке результатов просмотра, согласно изобретению положение луча ДНА изменяют путем изменения угла наклона его плоскости и азимута или еще и угла места, запоминают угловые положения лучей ДНА, при которых обнаружены объекты, привязанные к одной дальности, и вычисляют угловые координаты общих участков пространства для этих положений, принимая их за угловые координаты обнаруженных объектов.
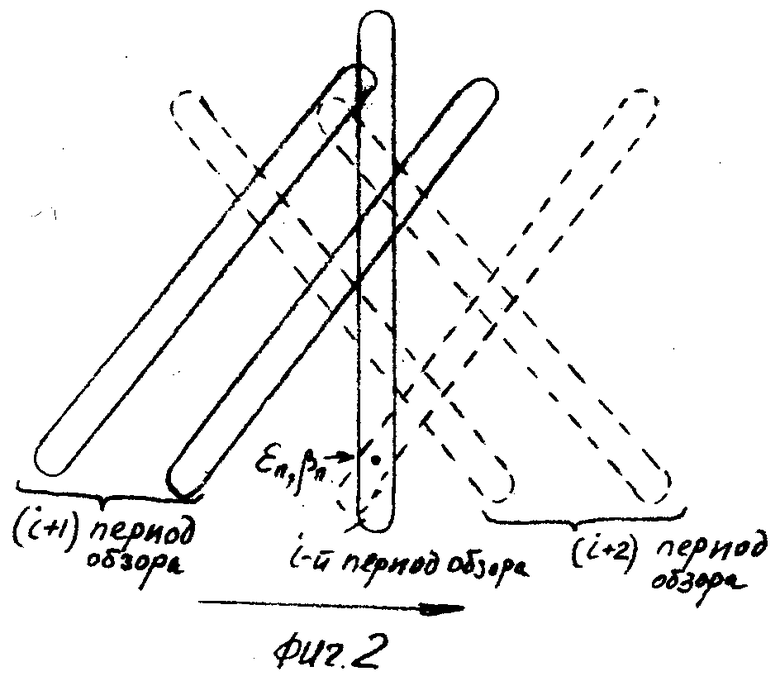
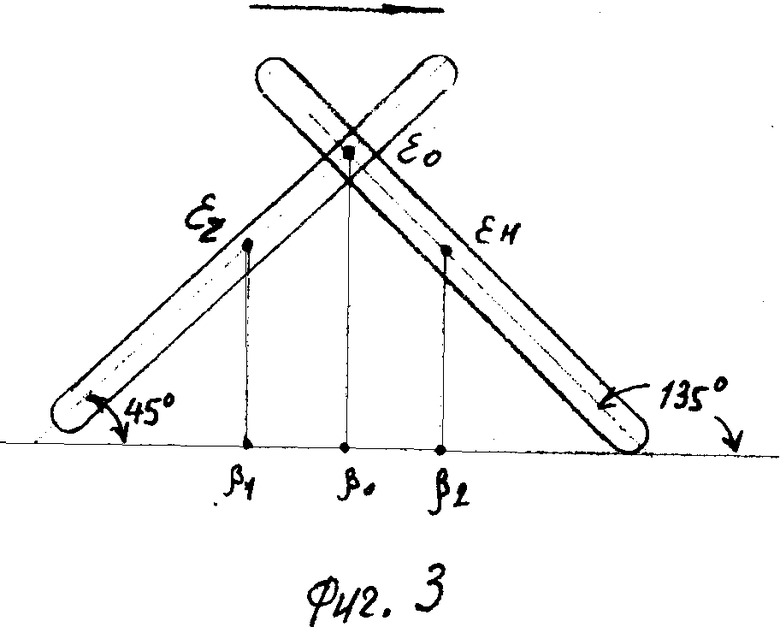
На фиг.1 изображено сечение луча ДНА в вертикальной плоскости при последовательных его положениях, занимаемых за счет одновременного перемещения по азимуту и изменения угла наклона (стрелки на фигуре). На фиг.2 изображено сечение луча в вертикальной плоскости при последовательных его положениях за счет азимутального его перемещения и изменения угла наклона один раз за период обзора. На фиг.3 изображено сечение луча в вертикальной плоскости для двух положений при
εr = εн и γr = 45°, γн = 135°.
Таким образом, суть изобретения состоит в следующем.
Предположим, что в процессе вращения ДНА по азимуту в положении I (см. фиг. 1), определяемом координатами центра сечения луча ДНА углом места ε1, азимутом β1 и углом наклона ДНА γ1, обнаружен объект на дальность D0.
В процессе дальнейшего вращения при достижении азимута β2 поворачивают ДНА вокруг центра сечения, устанавливая последовательно углы наклона γi... γк....
При обнаружении объекта на дальности Do ± ΔD при угле наклона луча ДНА, равном γ2, считают, что объект находится в зоне пересечения двух положений лучей - ε1, β1, γ1 и ε2, β2, γ2, координаты которой εo, βo. Величина ΔD определяется точностью измерения дальности и возможным перемещением объекта за время, прошедшее с момента его обнаружения при угле наклона γ1 до момента при угле γ2. Можно показать, что, если γ1 90o, то угловые координаты зоны пересечения (а значит, и обнаруженного объекта) определяются выражениями
Если объект обнаружен при n положениях луча, определяемых координатами εi, βi, γi при i= 1-n, то координаты объекта εo, βo могут быть определены путем решения системы n уравнений
Возникающая при n>2 избыточность позволяет устранить неоднозначность (если в зоне находятся несколько объектов на одной дальности) и уменьшить область пространства воздействия помехи. Так, если, например, в зоне имеется источник помех (фиг.1) с координатами εп, β1, из-за чего при положении луча ε1, β1, γ1 объект не может быть обнаружен с требуемой достоверностью, то из системы уравнений (2) исключается уравнение при i=1. В этом случае зона действия помехи может быть сведена к объему зоны пересечения лучей.
Просмотр участка при различных значениях γ может быть осуществлен и за счет изменения g один раз за период обзора, когда весь i-й период обзора осматривают зону с углом наклона ДНА gi (см. фиг. 2). В этом случае за n периодов обзора получено n уравнений (2).
Из (1) и (2) видно, что положение области пересечения можно изменять еще и за счет изменения угла места ε2, εi.
В случае простой воздушной обстановки (отсутствие большого числа близко расположенных объектов, создающих неоднозначность, и источников помех) наиболее простым вариантом реализации способа может быть просмотр зоны, например, в четные периоды обзора при γr 45o, а в нечетные γн 135o (см. фиг. 3).
В этом случае при tgεr = tgεн = tgε угловые координаты объекта будут определяться из выражения
где ε, β2, β1 угловые координаты лучей ДНА, при которых был обнаружен объект, привязанный к одной дальности.
Изобретение относится к области радиолокации и может быть использовано в РЛС для контроля воздушного пространства и управления воздушным движением. В основу изобретения положена техническая задача измерения угла места обнаруженного объекта РЛС с плоским лучом ДНА. Для этого в способе обзора пространства РЛС с плоским лучом ДНА, основанном на последовательном просмотре участка пространства при различных положениях луча и совместной обработке результатов просмотра, положение луча изменяют путем изменения угла наклона его плоскости и азимута или еще и угла места, запоминают угловые положения луча, при которых обнаружены объекты, привязанные к одной дальности, и вычисляют угловые координаты общих участков пространства для этих положений, принимая их за координаты обнаруженных объектов. 3 ил.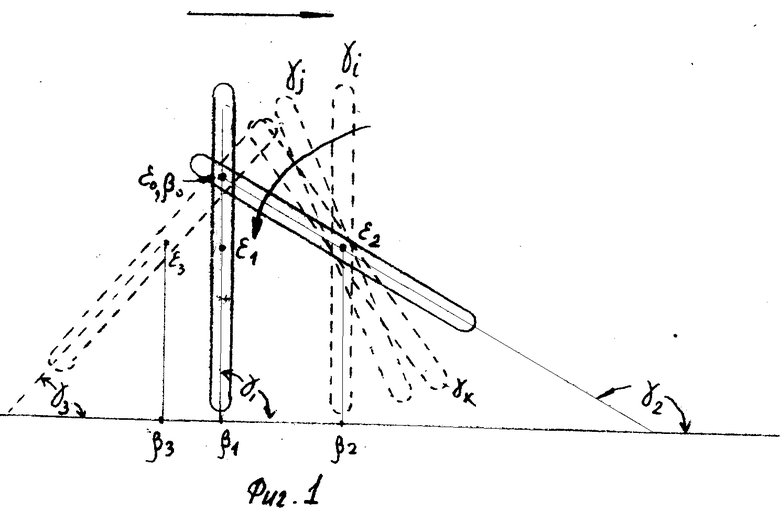
Способ обзора воздушного пространства радиолокационной станцией с плоским лучом диаграммы направленности антенны, основанный на последовательном просмотре участка пространства при различных положениях луча и совместной обработке результатов просмотра, отличающийся тем, что положение луча изменяют путем изменения угла наклона его плоскости и азимута или изменения угла наклона его плоскости, азимута и угла места, а совместную обработку выполняют путем запоминания угловых положений луча, при которых обнаружены объекты, привязанные к одной дальности, и вычисления угловых координат общих участков пространства для этих положений, которые принимают за координаты обнаруженных объектов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сиверс А.П., Суслов Н.А | |||
| Основы радиолокации | |||
| - М.: Сов.радио, 1956, с.148 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Справочник по радиолокации / Под ред | |||
| М.Сколника | |||
| - М.: Сов.радио, 1978, с.337. | |||

