Изобретение относится к области корректируемых инерциальных навигационных систем и может быть использовано при разработке комплексированных навигационных систем, в которых основная навигационная информация, поставляемая бесплатформенными инерциальными навигационными системами, корректируется по позиционной и скоростной информации, поставляемой источниками внешней информации.
При описании способа используются следующие ортогональные системы координат:
- трехгранник Oh1h2h3, лежащий в плоскости Гринвичского меридиана, ось Oh3 направлена на северный полюс;
- идеальный (сопровождающий) трехгранник Mx1x2x3 с началом в точке М, связанной с объектом, ось х3 совпадает с местной вертикалью;
- модельный трехгранник My1y2y3, реализуемый бортовой ЦВМ;
- приборный трехгранник Mz1z2z3, связанный со строительными осями системы (блока чувствительных элементов).
Взаимная ориентация трехгранников Mx1x2x3 и My1y2y3 определяется вектором α малых углов поворота.
Взаимная ориентация трехгранников Mz1z2z3 и My1y2y3 задается матрицей ориентации А, имеющей следующий вид:

где: ϑ, γ, ψ - углы крена, тангажа и гироскопического курса соответственно.
Ориентация трехгранника My1y2y3 относительно трехгранника Oh1h2h3 задается матрицей направляющих косинусов В, имеющей следующий вид:

где: ϕ, λ, ε - географические координаты и курсовой угол.
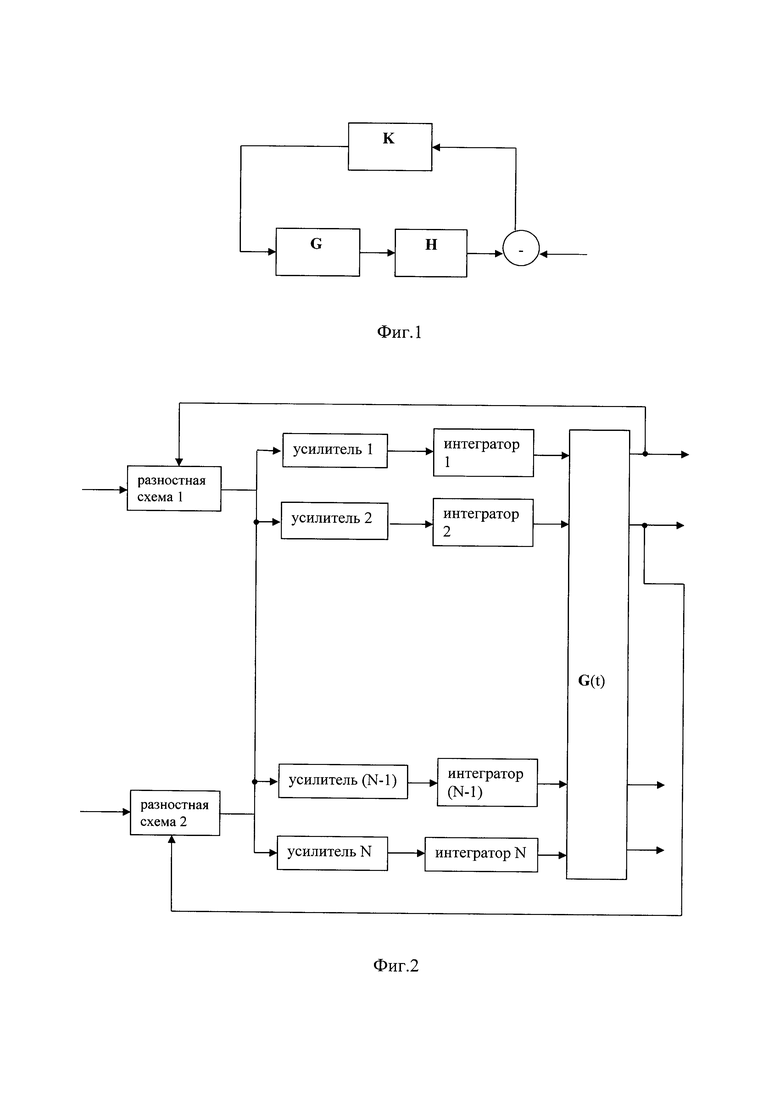
Стандартная блок-схема, по которой строится коррекция навигационной системы по внешней информации, представлена на Фиг. 1, где:
G - импульсная переходная функция объекта регулирования;
Н - матрица связи вектора корректируемых параметров системы х и вектора измерения z.
На вход разностной схемы подается сигнал Нх, а на другой вход разностной схемы подается измерение z. Полученная разность z-Hx подается на вход блока обратной связи с коэффициентом усиления К, выход которого подключен к входу блока G. Математическая запись блок-схемы, представленной на Фиг. 1, имеет следующий вид:

где надстрочный индекс “ ” обозначает операцию дифференциирования.
” обозначает операцию дифференциирования.
Примером такого способа коррекции инерциальной системы по внешней скоростной информации, поставляемой доплеровским датчиком скорости, (ДИСС) является инерциально-допплеровская система, реализованная в таких серийных астроинерциальных системах как Л-14МА и Л41. В обеих системах при построении фильтра ставилась задача оценки ошибок построения вертикали, скоростных ошибок и линейной комбинации кинематических ошибок системы, инструментальных ошибок (нескомпенсированные дрейфы и ошибки акселерометров) и ошибок измерения, вызванных ошибками взаимной привязки осей корректируемой системы и антенн ДИСС. Базовой при построении фильтра (импульсная переходная функция G) была принята динамическая группа уравнений ошибок системы (8)-(13), приведенная ниже. Асимптотически устойчивый фильтр шестого порядка, реализованный в системе Л-14МА, обеспечивал готовность оценок ошибок построения вертикали и скоростной ошибки за 30 минут, а фильтр того же порядка, реализованный в системе Л41 с использованием метода калмановской фильтрации, обеспечивал готовность оценок ошибок построения вертикали и скоростной ошибки за 12 минут времени.
Наиболее близким по своей сущности к предложенному решению является способ определения ошибок известной бесплатформенной инерциальной системы БИНС-СП по внешней позиционной и скоростной информации, заключающийся в формировании вектора измерений как разности позиционной и скоростной информации, поставляемой внешним источником информации, и позиционной и скоростной информации, поставляемой корретируемой БИНС, с последовательной обработкой сформированного вектора измерений путем фильтрации с целью определения ошибок корректируемой системы, включая и инструментальные ошибки системы.
Для коррекции известной системы используется внешняя информация о местоположении объекта и скоростная информация, поставляемая навигационными спутниками. Вектор оцениваемых параметров корректируемой системы имеет следующий вид:

с матрицей связи:
и измерением:

где:
надстрочный индекс “т” обозначает операцию транспонирования;
- элементы вектора измерения х:
Δr1, Δr2 - оценки позиционных ошибок;
δV1, δV2 - оценки скоростных ошибок;
α1, α2 - оценки ошибок построения вертикали;
β1, β2, β3 - оценки кинематических ошибок;
ν1, ν2, ν3 - оценки некомпенсированных дрейфов системы;
Δƒ1, Δƒ2, Δƒ3 - оценки ошибок масштабирования акселерометров;
Δt1, Δt2 - оценки ухода нулей акселерометров;
k1, k2, k3 - оценки неколлинеарности осей чувствительности акселерометров и осей гироскопов;
 - оценки неортогональности осей чувствительности акселерометров,
- оценки неортогональности осей чувствительности акселерометров,
- элементы вектора измерения z:
Δr1=ϕисз-ϕнс - разница по широте между внешней информацией и показаниями корректируемой системы;
Δr2=(λисз-λнс)Cosϕ - разница по долготе между внешней информацией и показаниями корректируемой системы;
δVi, при i=1,2 - разница по скоростям между внешней информацией и показаниями корректируемой системы.
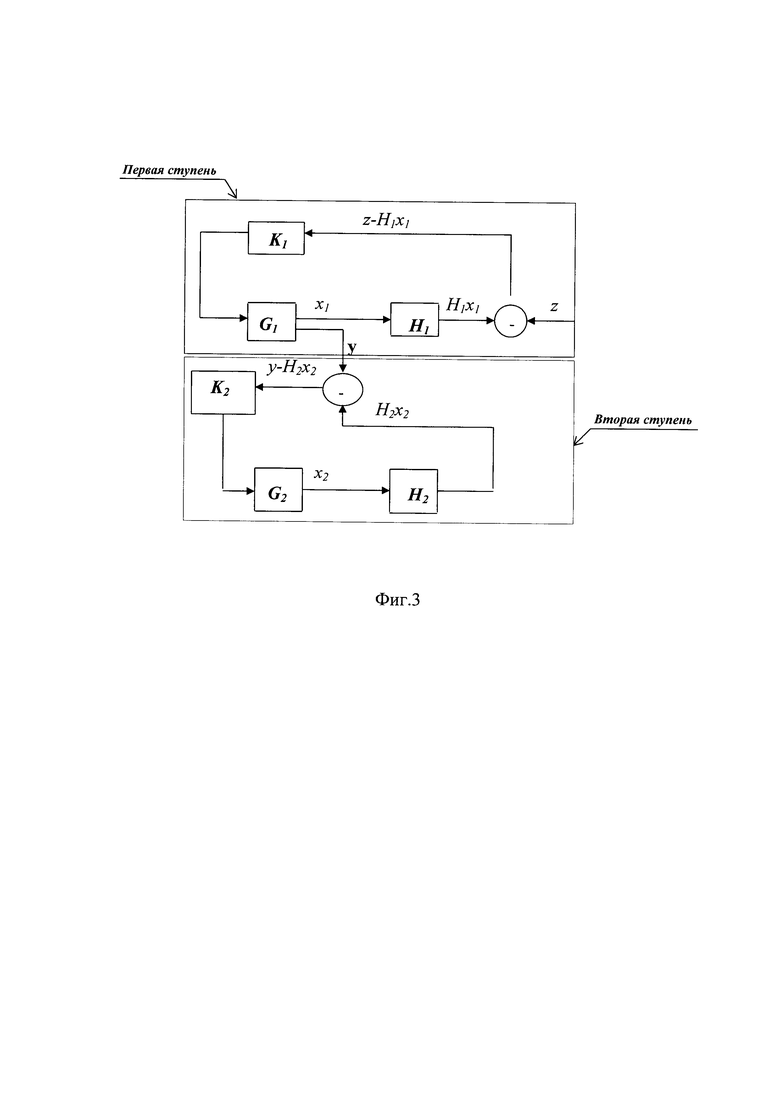
Структурная блок-схема блока определения ошибок (один канал) согласно известному способу определения ошибок БИНС приведена на Фиг. 2, где на входы разностных схем подаются измерения γ1, Δωi, i=1,2, содержащие ошибки местоположения объекта и его скорости, сформированные на основании информации, поступающей от источников внешней информации, а на другие входы подаются оценки этих ошибок, сформированные на выходе фильтра. Выходы разностных схем через усилители подключены к входам интеграторов, выходы которых подключены к входам блока коммутации G(t). Блок коммутации G(t) осуществляет связь между выходами интеграторов и структура его определяется структурой импульсной переходной функции G. Выходом блока коммутации являются элементы xi вектора х оценок ошибок корректируемой системы.
Известный способ определения ошибок БИНС осуществляется следующим образом.
На входы разностных схем подаются измерения γi, Δωi соответственно, сформированные на основе информации о местоположении объекта и его скорости, поступающей от внешних источников информации, а на другие входы подаются оценки этих измерений x1, х2, формируемые на выходе системы, в результате чего на выходах этих схем формируются сигналы, равные разностям, стоящим в скобках формулы (3). Далее эти разности усиливаются усилителями, интегрируются и подаются на входы блока G(t), на выходе которого в соответствии с (3) формируется вектор х оценок ошибок корректируемой системы. Коэффициенты усиления усилителей определяются по критерию устойчивости и оптимальности системы.
Структурная блок-схема второго канала аналогична блок-схеме, представленной на Фиг. 2.
Принципиальное отличие при построении методов идентификации ошибок БИНС с использованием всякого рода внешней информации от традиционной схемы построения аналогичных методов для классической схемы платформенных ИНС заключается в том, что в классической (платформенной) схеме построения ИНС приборный трехгранник системы совпадает (с точностью до вектора β кинематических ошибок системы) с сопровождающим трехгранником, в то время как в БИНС приборный трехгранник произвольным образом ориентирован в осях сопровождающего трехгранника. Взаимная ориентация этих трехгранников задается матрицей ориентации А (1). В результате этого могут быть созданы условия, при которых формируется невырожденная система алгебраических уравнений, обеспечивающих вычисление всего набора определяемых ошибок системы, включая и инструментальные ошибки, но эти условия будут выполнены только при выполнении объектом маневра. В условиях стационарного движения объекта система будет ненаблюдаема.
К недостаткам известного способа определения ошибок БИНС можно отнести то, что при работе фильтра не оговорены условия, при которых выполняется наблюдаемость системы - предполагается, что при установке фильтра на маневрирующий объект рано или поздно эти условия будут выполнены и будет получена качественная оценка определяемых параметров. При этом нигде не оговаривается время выполнения этих условий, определяемое временем переходного процесса. В результате этого могут возникнуть ситуации, при которых время выполнения условий наблюдаемости окажется меньше времени переходного процесса и переход в режим прогноза произойдет при некачественной оценке параметров, что приведет к повышенной прогнозируемой ошибке оценки при работе фильтра в таком режиме. Для уменьшения этого пагубного фактора разработчики фильтра пошли на ввод диссипативной функции в режиме прогноза, что, естественно, привело к сокращению времени прогноза и снижению его точности.
Целью предложенного изобретения является разработка способа определения ошибок БИНС, свободной от указанных недостатков.
Техническим результатом является упрощение способа получения оценки ошибок корректируемой системы, что приводит к уменьшению времени переходного процесса и сокращению времени готовности.
Технический результат достигается тем, что предложенный способ определения ошибок БИНС по внешней позиционной и скоростной информации заключается в формировании вектора измерений как разности позиционной и скоростной информации, поставляемой внешним источником информации, и позиционной и скоростной информации, поставляемой корретируемой БИНС, с последовательной обработкой сформированного вектора измерений путем фильтрации с целью определения ошибок корректируемой системы, включая и инструментальные ошибки системы, при этом, с целью повышения точности определения ошибок корретируемой системы и сокращения времени готовности получаемых оценок обработка сформированного вектора измерений проводится в два этапа, при этом, на первом этапе безусловно определяются такие динамические ошибки системы как позиционная ошибка, скоростные ошибки, ошибки построения вертикали и кинематические ошибки, включая и курсовую ошибку, а на втором этапе при выполнении условий наблюдаемости, связанных с маневром объекта, определяются систематические составляющие инструментальных ошибок системы, таких как нескомпенсированные дрейфы системы и ошибки акселерометров, и после определения этих ошибок проводится уточнение полученных оценок динамических ошибок системы.
При построении способа учитывается то обстоятельство, что в совокупности определяемых ошибок системы такие ошибки как ошибка α построения вертикали и ошибки γ определения местоположения являются двухкомпонентными векторами, определяемыми в проекциях на горизонтальные оси сопровождающего трехгранника (местного горизонта), а кинематические ошибки β и инструментальные ошибки системы ν, ε, (нескомпенсированные дрейфы и ошибки акселерометров) являются трехкомпонентными векторами, при этом инструментальные ошибки ν, ε, которые рассматриваются как систематические ошибки, определены в проекциях на оси приборного трехгранника, ориентированного относительно сопровождающего трехгранника, как было сказано выше, в БИНС произвольным образом. Взаимная ориентация этих трехгранников определяется матрицей ориентации (1).
Учет этих особенностей привел к созданию двухэтапного способа определения ошибок корректируемой БИНС, реализуемого посредством двухступенчатого блока определения ошибок корректируемой БИНС, на первой ступени которого, выполненной двухканальной, определяются такие динамические ошибки системы как ошибка определения координат γ, скоростная ошибка Δω, ошибка построения вертикали α, кинематическая ошибка β и линейная комбинация инструментальных ошибок ν, ε в проекциях на оси сопровождающего трехгранника. Эти линейные комбинации инструментальных ошибок системы используются как новый вектор измерения, поступающий на вход второй ступени, выполненной трехканальной, и решающей задачу определения инструментальных ошибок ν, ε.
Структурная схема блока определения ошибок корректируемой БИНС, реализующего предложенный способ, представлена на Фиг. 3, где:
z - вектор измерения, поступающий на вход первой ступени в виде скоростной и позиционной информации;
x1 - вектор состояния первой ступени;
Н1 - матрица связи вектора измерения z и вектора состояния x1;
G1 - импульсная переходная функция первой ступени;
К1 - коэффициент усиления в цепи обратной связи первой ступени;
y - вектор измерения второй ступени, сформированный на выходе первой ступени;
х2 - вектор состояния второй ступени;
Н2 - матрица связи вектора измерения у и вектора состояния х2;
G2 - импульсная переходная функция второй ступени;
К2 - коэффициент усиления в цепи обратной связи второй ступени.
Поставленная задача формулируется следующим образом.
Решается задача определения (получения оценки) N-мерного вектора x={xN} по измерениям z, где:

Разобьем элементы вектора х на две группы элементов:
x1={xi}, i=1, …, M, M<N,
x2={xj}, j=M+1, …, N
Выходом оператора G1 первой ступени являются векторы х1 в состав которого входит вектор y, являющийся линейной комбинацией элементов вектора х2:

Вектор у поступает на вход второй ступени (как измерение), решающей задачу определения (получения оценки) вектора х2. Оба канала системы, как видно из приведенной на Фиг. 3 блок-схемы, представляют однородную систему линейных операторов поведение ошибок Δх1, и Δх2 определения искомых параметров х1, х2 которого описывается линейными операторами:


где:
A1=E-G1dt;
A2=E-G2dt;
E - единичная матрица;
dt - шаг интегрирования;
 ,
,  ,
,  ,
,  - соответственно априорные и апостериорные значения вектора Δx1, Δх2.
- соответственно априорные и апостериорные значения вектора Δx1, Δх2.
Синтез системы заключается в выборе надлежащих коэффициентов усиления К1, К2 в цепи обратной связи, обеспечивающих устойчивость системы и удовлетворение заданного критерия.
В качестве базовых при построении системы используются уравнения, описывающие поведение динамических и кинематических ошибок в проекциях на оси сопровождающего трехгранника классической платформенной системы.






где:
надстрочный индекс “ ”, стоящий после матрицы, обозначает кососимметрическую матрицу;
”, стоящий после матрицы, обозначает кососимметрическую матрицу;
Δω1, Δω2 - скоростные ошибки системы;
α1, α2 - ошибки построения вертикали;
β - вектор кинематических ошибок системы;
δε1, δε2, δω - проекции векторов инструментальных ошибок ε, ν (ошибок акселерометров, нескомпенсированных дрейфов системы соответственно) на оси сопровождающего трехгранника, определяемые для БИНС, как:


ε, ν - систематические составляющие векторов инструментальных ошибок системы (ошибок акселерометров, нескомпенсированных дрейфов системы соответственно) определенные в проекциях на оси приборного трехгранника, при решении задачи коррекции ставится задача определения регулярных составляющих инструментальных ошибок системы, т.е. предполагается, что:


А - матрица ориентации, определяемая по (1);
 - кососимметрическая матрица, соответствующая вектору ω абсолютных угловых скоростей вращения сопровождающего трехгранника.
- кососимметрическая матрица, соответствующая вектору ω абсолютных угловых скоростей вращения сопровождающего трехгранника.
При этом:
ω1=V2/R+ub13
ω2=-V1/R+ub23
ω3=ub33
где:
b13, b23, b33 - элементы матрицы направляющих косинусов В, определяемые по (2);
V1, V2 - линейные скорости движения объекта;
R - радиус Земли;
u=15 град/час - скорость вращения Земли.
Прежде чем приступать к изложению способа определения ошибок корректируемой инерциальной системы по внешней позиционной и скоростной информации проведем стандартную процедуру выделения наблюдаемого подпространства. Процедура заключается в определении элементов xi вектора х наблюдаемых параметров.
Обозначим:




где Δω1, Δω2, γ1, γ2 определяются как:




и являются элементами вектора измерения z, формируемого по внешней позиционной и скоростной информации. (Здесь и далее первый подстрочный индекс при элементах вектора x обозначает номер канала корректируемой системы).
Подставляя х11, х21, х21, х22 в (8), (9) с учетом (13), получаем:




где:


Дифферециируя x13, х23 с учетом (13), получаем:


где:


или с учетом (14)-(17)


где  - кососимметрическая матрица, соответствующая вектору
- кососимметрическая матрица, соответствующая вектору  угловых скоростей вращения приборного трехгранника (скоростей изменения углов крена, тангажа и курса объекта), нижними индексами в произведениях матриц на вектор, стоящими в скобках, указан номер строки этого произведения.
угловых скоростей вращения приборного трехгранника (скоростей изменения углов крена, тангажа и курса объекта), нижними индексами в произведениях матриц на вектор, стоящими в скобках, указан номер строки этого произведения.
Дифференцируя (36) и (37), с учетом (13), (30) и (31), получаем:


где:


Дифференцируя (40) и (41), получаем:






где: 
При выводе (42)-(44) использованы уравнения Пуассона:

и матричное тождество:

которое доказывается непосредственным перемножением .
В результате проделанных выкладок построена автономная наблюдаема система вида (3) с вектором определяемых параметров:

импульсной переходной функцией:
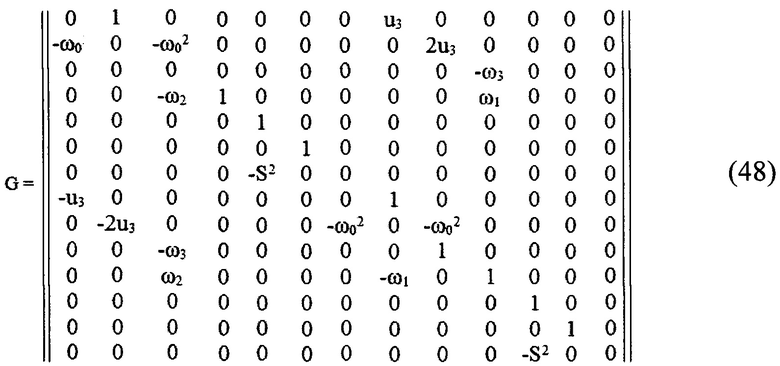
измерением:

и матрицей связи:

Итак, в процессе проведения процедуры построения наблюдаемого подпространства с использованием в качестве базовой модели динамической группы уравнений ошибок системы (8)-(11) определены элементы х14, х24 вектора х наблюдаемых параметров, которые представляют собой линейные комбинации вектора β кинематических ошибок системы и инструментальных ошибок δω, δε, определенных в проекциях на оси сопровождающего трехгранника. Далее, продолжая процедуру построения наблюдаемого подпространства с использованием уже в качестве базовой модели кинематической группы уравнений ошибок системы (12) определяются элементы х15, х25, представляющие собой линейные комбинации только векторов инструментальных ошибок системы δω, δε.
Построенный в результате описанной процедуры вектор х определяемых параметров системы, вычисляемый по (3) с измерением (49), импульсной переходной функцией, определяемой по (48), и матрицей связи (50), представляет первую ступень заявляемого способа определения ошибок корректируемой системы по внешней скоростной и позиционной информации.
В результате работы построенного фильтра из (18)-(21) определяются позиционные и скоростные ошибки системы γi, Δωi, i=1,2, из (30), (31) определяются βi, как β1=x13, β2=x23 с точностью до инструментальных ошибок системы  ,
,  , из (36), (37) определяется β3 как β3=(x14+x24)/(ω1+ω2) с точностью до инструментальных ошибок системы.
, из (36), (37) определяется β3 как β3=(x14+x24)/(ω1+ω2) с точностью до инструментальных ошибок системы.
Структурная блок-схема первой ступени блока определения ошибок представлена на Фиг. 4.
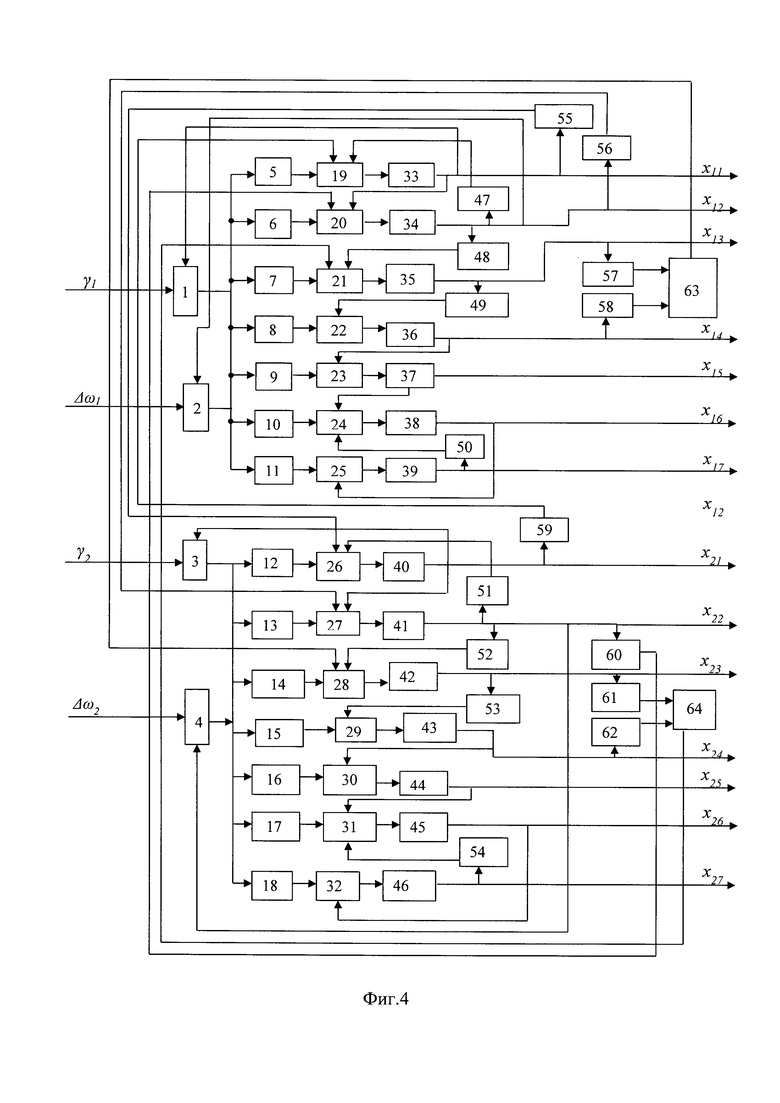
В соответствии с указанной блок-схемой первая ступень блока определения ошибок БИНС состоит из четырех разностных схем 1 -4, тридцати усилителей 5-18, 55-62, шестнадцати сумматоров 19-32, 63, 64 и четырнадцати интеграторов 33-46. 1, 2, 3, 4 - разностные схемы, на первые входы которых подаются измерения γi (на входы разностных схем 1 и 3) и Δωi (на первые входы разностных схем 2 и 4), i=1,2, содержащие ошибки местоположения объекта и его скорости, сформированные на основании информации, поступающей от источников внешней информации, а на вторые входы подаются оценки этих ошибок, сформированные на выходах интеграторов 33, 34, 40, 41. Первая и вторая разностные схемы 1, 2 выходами подключены через последовательно соединенные первый усилитель 5 и первый сумматор 19 к входу первого интегратора 33, через последовательно соединенные второй усилитель 6 и второй сумматор 20 к входу второго интегратора 34, через последовательно соединенные третий усилитель 7 и третий сумматор 21 к входу третьего интегратора 35, через последовательно соединенные четвертый усилитель 8 и четвертый сумматор 22 к входу четвертого интегратора 36, через последовательно соединенные пятый усилитель 9 и пятый сумматор 23 к входу пятого интегратора 37, через последовательно соединенные шестой усилитель 10 и шестой сумматор 24 к входу шестого интегратора 38, а также через последовательно соединенные седьмой усилитель 11 и седьмой сумматор 25 к входу седьмого интегратора 39. Третья и четвертая разностные схемы 3, 4 выходами подключены через последовательно соединенные восьмой усилитель 12 и восьмой сумматор 26 к входу восьмого интегратора 40, через последовательно соединенные девятый усилитель 13 и девятый сумматор 27 к входу девятого интегратора 41, через последовательно соединенные десятый усилитель 14 и десятый сумматор 28 к входу десятого интегратора 42, через последовательно соединенные одиннадцатый усилитель 15 и одиннадцатый сумматор 29 к входу одиннадцатого интегратора 43, через последовательно соединенные двенадцатый усилитель 16 и двенадцатый сумматор 30 к входу двенадцатого интегратора 44, через последовательно соединенные тринадцатый усилитель 17 и тринадцатый сумматор 31 к входу тринадцатого интегратора 45, через последовательно соединенные четырнадцатый усилитель 18 и четырнадцатый сумматор 32 к входу четырнадцатого интегратора 46. Разностная схема 1 вторым входом подключена к выходу интегратора 33, которым он также подключен ко второму входу сумматора 20 и через двадцать третий усилитель 55 ко второму входу восьмого сумматора 27. Разностная схема 2 вторым входом подключена к выходу интегратора 34, которым он дополнительно подключен через пятнадцатый усилитель 47 ко второму входу сумматора 19, через шестнадцатый усилитель 48 ко второму входу сумматора 21, а также через двадцать четвертый усилитель 56 ко второму входу сумматора 27. Выход интегратора 35 подключен через семнадцатый усилитель 49 ко второму входу сумматора 22, через двадцать пятый усилитель 57 к первому входу пятнадцатого сумматора 63, который выходом подключен ко второму входу сумматора 28, а вторым входом через двадцать шестой усилитель 58 к выходу интегратора 36, подключенному также ко второму входу сумматора 23. Выход интегратора 37 подключен ко второму входу сумматора 24, третий вход которого подключен через восемнадцатый усилитель 50 к выходу интегратора 39. Выход интегратора 38 подключен ко второму входу сумматора 25. Выходом интегратор 40 подключен ко второму входу разностной схемы 3, а также к третьему входу сумматора 27 и через двадцать седьмой усилитель 59 к третьему входу сумматора 19. Вторым входом разностная схема 4 подключена к выходу интегратора 41, которым он дополнительно подключен через девятнадцатый усилитель 51 к третьему входу сумматора 26, через двадцатый усилитель 52 к третьему входу сумматора 28, а через двадцать восьмой усилитель 60 к третьему входу сумматора 20. Выходом интегратор 42 подключен через двадцать первый усилитель 53 ко второму входу сумматора 29, через двадцать девятый усилитель 61 к первому входу шестнадцатого сумматора 64, который выходом подключен к третьему входу сумматора 21, а вторым входом через тридцатый усилитель 62 к выходу интегратора 43, подключенному также ко второму входу сумматора 30. Интегратор 44 выходом подключен ко второму входу сумматора 31, третьим входом подключенного через двадцать второй усилитель 54 к выходу интегратора 46. Интегратор 45 выходом подключен ко второму входу сумматора 32.
Работа первой ступени аналогична работе блока определения ошибок БИНС. На первые входы разностных схем 1, 2, 3, 4 подаются измерения γi, Δωi, i=1,2 первого и второго каналов соответственно, сформированные на основе информации о местоположении объекта и его скорости, поступающей от внешних источников информации и корректируемой системы, а на вторые входы подаются оценки этих измерений х11, x12, х21, х22, формируемые на выходах интеграторов 33, 34, 40, 41, в результате чего формируются сигналы, равные разностям, стоящим в скобках формулы (3). Далее эти разности усиливаются усилителями 5-18 и интегрируются интеграторами 33-46, на выходе которых в соответствии с (3) формируется вектор х оценок ошибок корректируемой системы. Коэффициенты усиления усилителей 5-18 определяются по критерию устойчивости и оптимальности системы.
На Фиг. 6-11 представлены результаты моделирования работы первой ступени в стационарных условиях (матрица ориентации А неизменна), при нулевых инструментальных ошибках и начальных скоростных ошибках Δω=0 и ошибках построения вертикали α1=10 угл.мин., α2=20 угл.мин., и динамических ошибках β=0.
На Фиг. 6 представлена разность между модельной скоростной ошибкой и ее оценкой, полученной на выходе первой ступени в угл.мин/сек.
На Фиг. 7 представлена разность между модельной ошибкой построения вертикали и ее оценкой, полученной на выходе первой ступени в угл.мин.
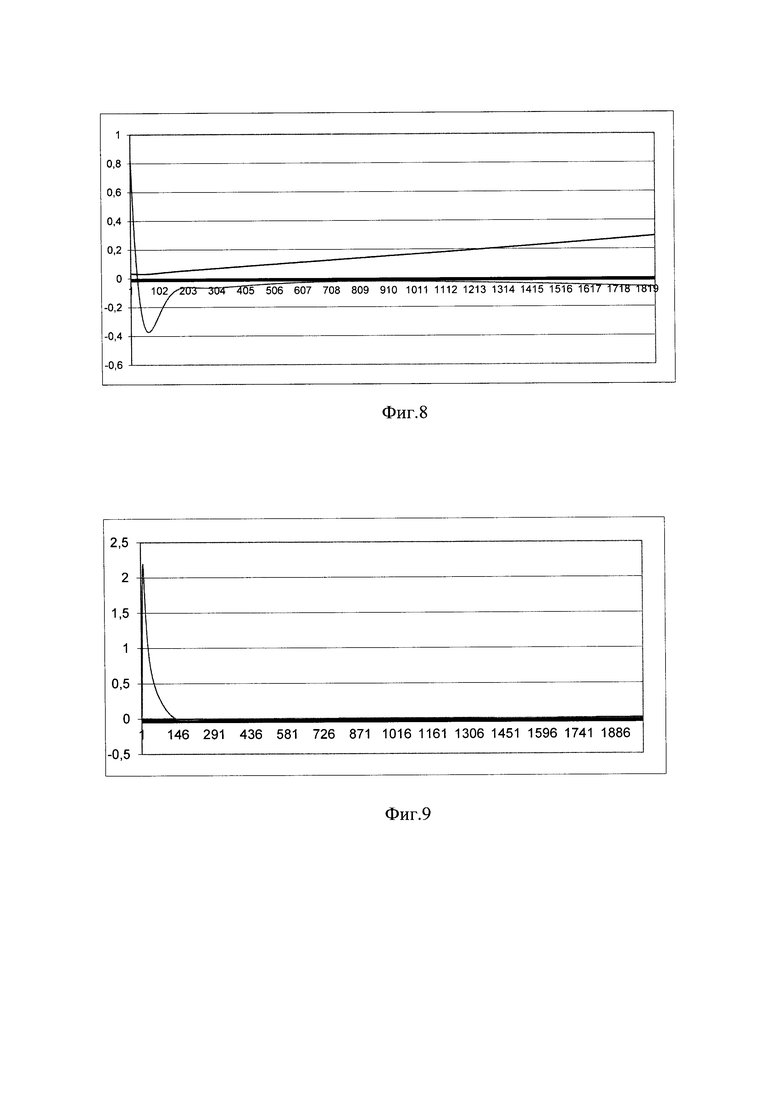
На Фиг. 8, 9 представлены графики, аналогичные графикам, представленным на Фиг. 6, 7, при наличии инструментальных ошибок δω1=0.2 град/час, δω2=0.1 град/час при работе системы в стационарном режиме (матрица ориентации А неизменна).
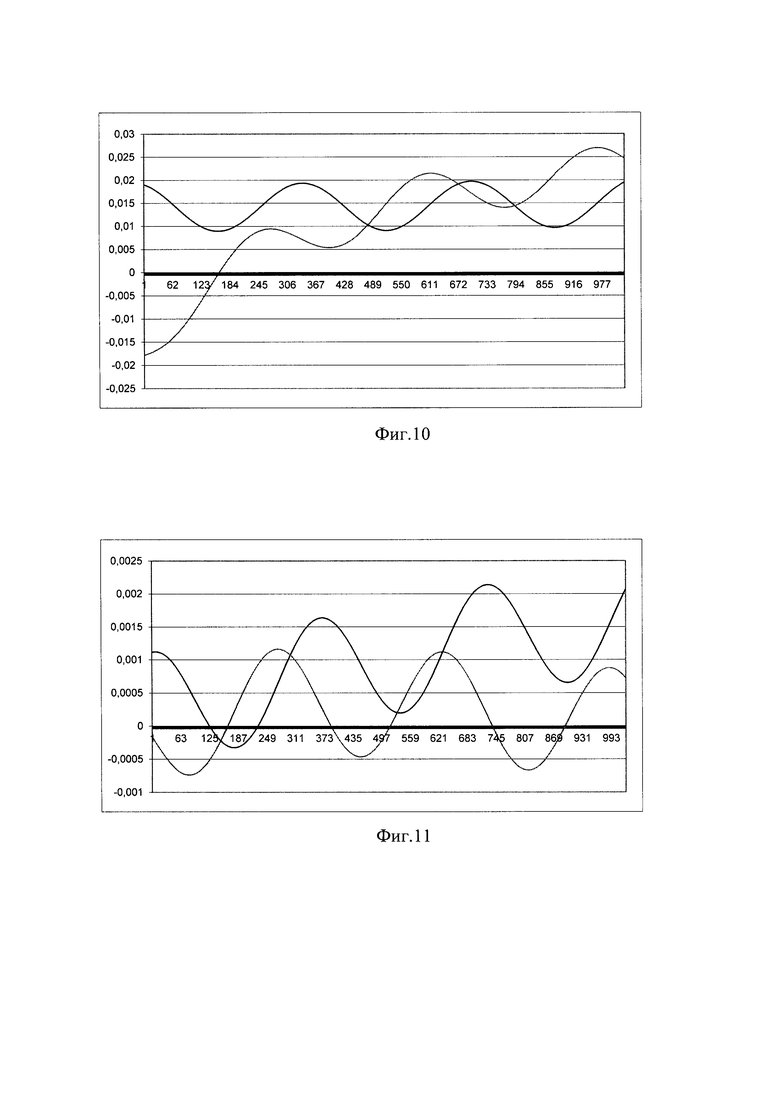
На Фиг. 10, 11 представлены графики, аналогичные графикам, представленным на Фиг. 6, 7, при наличии инструментальных ошибок δω2=0.2 град/час при вращении системы вокруг азимутальной (вертикальной) оси с угловой скоростью Ω=1 град/сек.
Как видно из приведенных результатов, при отсутствии инструментальных ошибок ошибки получаемых оценок асимптотически сходятся к нулю. При наличии таких инструментальных ошибок, как нескомпенсированные дрейфы системы, ошибки оценок скоростных ошибок сходятся к значениям, равным величине этих дрейфов при работе системы в стационарном режиме, или носят колебательный характер, частота колебаний которых совпадает со скоростью вращения системы вокруг соответствующей оси.
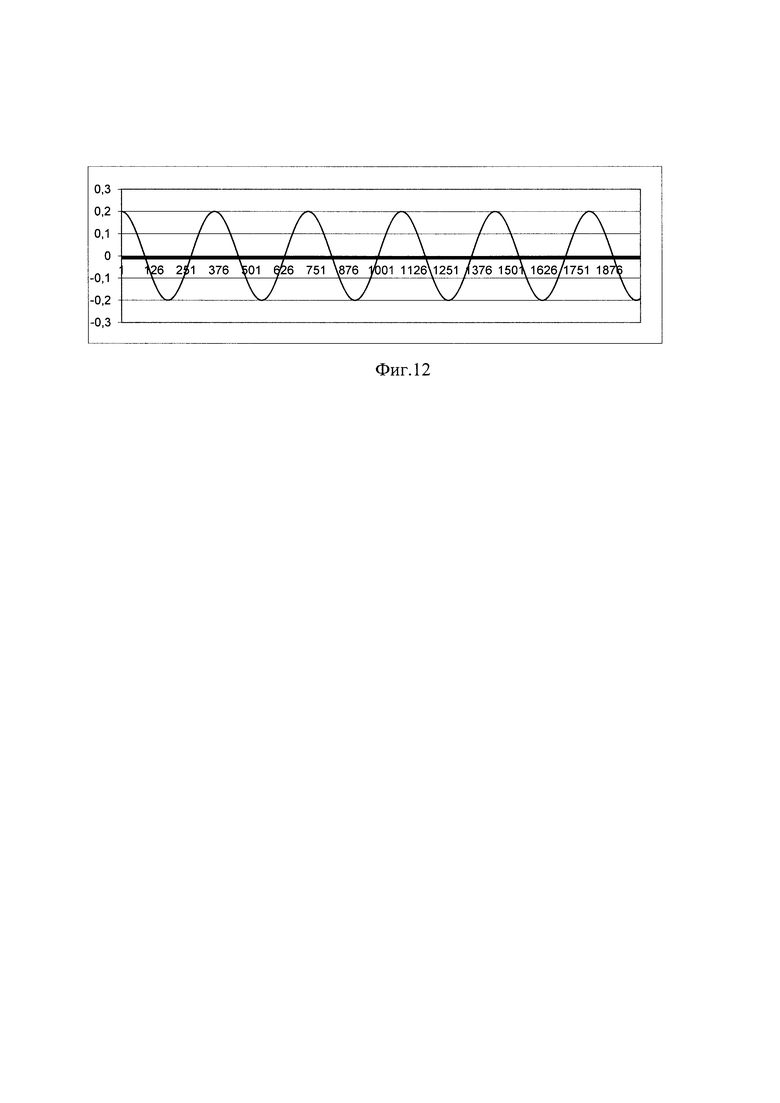
На Фиг. 12 представлен график элемента x15 вектора х определяемых параметров системы, представляющего линейную комбинацию инструментальных ошибок системы, при вращении системы вокруг азимутальной (вертикальной) оси с угловой скоростью Ω=1 град/сек. и при наличии инструментальной ошибки δω2=0.2 град/час.
Поскольку элементы x15, x25 вектора х являются линейными комбинациями инструментальных ошибок, то эти элементы могут использоваться как измерения, поступающие на вход второй ступени, в задачу которой входит определение этих инструментальных ошибок.
Непосредственно из (40), (41) с очевидностью следует линейная зависимость этих соотношений. Определим связь переменных х15, х25 с инструментальными ошибками системы ε и ν, определяемыми в проекциях на оси приборного трехгранника. С учетом (14), (15) соотношения (40), (41) будут иметь вид:


где αij - элементы матрицы направляющих косинусов.
Непосредственно из (48), (49) следует, что при маневре объекта, приводящему к изменению αij, можно получить переопределенную систему уравнений с максимальным рангом.
На второй ступени предлагаемого способа решением переопределенной системы определяется вектор  инструментальных ошибок системы.
инструментальных ошибок системы.
Из переменных х15, x25 сформируем вектор измерения второй ступени

где:
i=1,2 - номер канала системы;
j=1,5 - номер элемента вектора x2 в i-том канале системы, связанный с вектором  матрицей h2 размерности (2×6):
матрицей h2 размерности (2×6):

структура которой определяется из соотношений (48), (49), (51), (52).
При принятом допущении о постоянстве определяемых на второй ступени параметров для решения этой задачи может быть применен алгоритм метода наименьших квадратов (м.н.к.), представляющий в его итерационной форме записи модификацию фильтра Калмана, в котором переходная матрица F=E+GdT=E, где Е - единичная матрица соответствующей размерности.
Искомый вектор х2 может быть определен операцией псевдообращения:

где Н - матрица коэффициентов переопределенной системы (54), или в итерационной форме записи:



с начальными условиями:

где pii=N(N - достаточно большое число);
x0=0;
где:
 ,
,
hi - i-тая строка матрицы Н;
zi - i-тый элемент вектора измерения z.
Непосредственно из структуры матрицы связи Н следует, что необходимым условием наблюдаемости вектора х2 является неравенство вектора угловых скоростей приборного трехгранника Ω≠0. Очевидно, что достаточным условием наблюдаемости этих параметров будет максимальный ранг этой матрицы, равный шести. При этом, скорость сходимости получаемой оценки будет определяться степенью обусловленности матрицы (HтH).
При невыполнении условий постоянства элементов вектора х2 возможно применение другой формы (модификации) алгоритма м.н.к.
В рассматриваемой модификации оценка вектора х2 определяемых инструментальных ошибок системы ищется решением уравнений:

где:
Г=diag{γN-i-1} - диагональная матрица весовых коэффициентов;
N - количество измерений (количество строк матрицы H и элементов вектора z);
0<γ<1 - коэффициент затухания.
Приведем к итерационной форме:



Такая форма модификации алгоритма м.н.к., которую можно рассматривать как фильтр с ограниченной памятью, имеющий астатизм первого порядка, приводит к уменьшению возможной динамической ошибки, возникающей при невыполнении ограничений по постоянству оцениваемых параметров за счет ограничения его памяти. Параметр γ выбирается как компромисс между величинами флуктуационной и динамической ошибок. Применение этой модификации является в высшей степени более целесообразным, если вторая ступень включается до окончания переходного процесса первой ступени, т.е. вопрос включения второй ступени становится менее критичным.
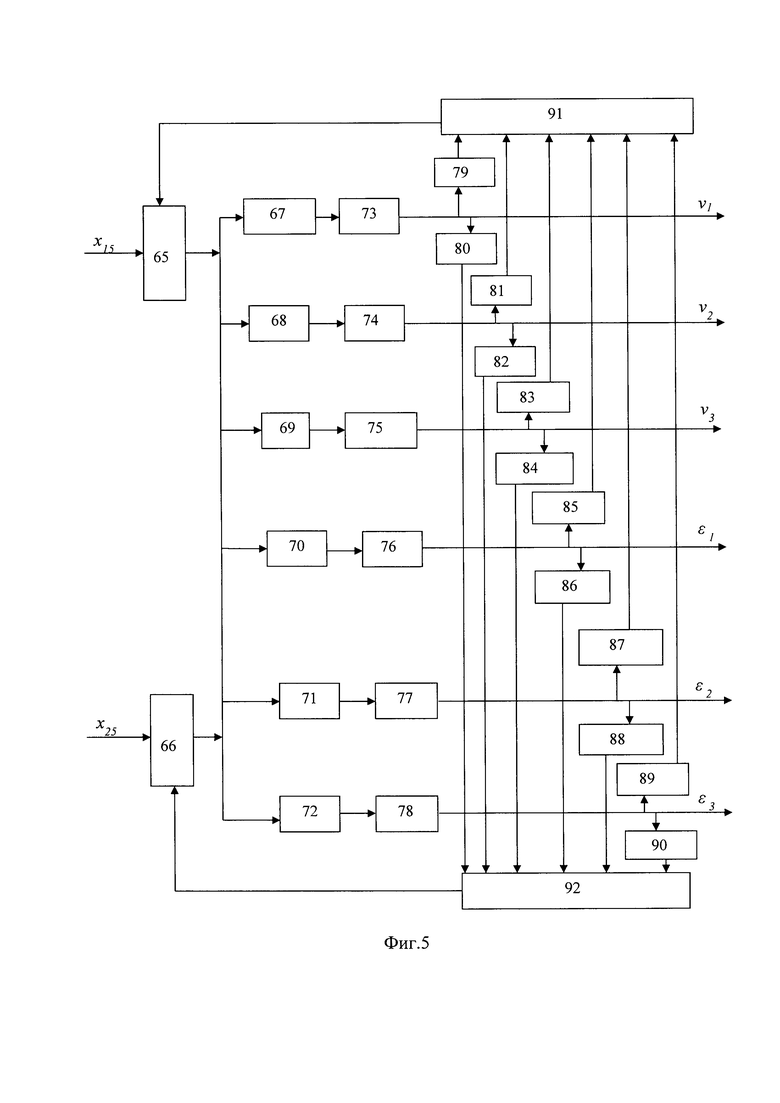
В соответствии с (56) структурная блок-схема второй ступени блока определения ошибок БИНС будет иметь вид, представленный на Фиг. 5.
Вторая ступень блока определения ошибок БИНС включает две разностные схемы 65, 66, восемнадцать усилителей 67-72, 79-90, шесть интеграторов 73-78 и два сумматора 91, 92. Пятая разностная схема 65 первым входом подключена, к выходу пятого интегратора 37 первой ступени, и вторым входом к выходу семнадцатого сумматора 91. Шестая разностная схема 66 первым входом подключена к выходу двенадцатого интегратора 44 первой ступени и вторым входом к выходу восемнадцатого сумматора 92. Выходы разностных схем 65, 66 подключены через тридцать первый усилитель 67 к входу пятнадцатого интегратора 73, через тридцать второй усилитель 68 к входу шестнадцатого интегратора 74, через тридцать третий усилитель 69 к входу семнадцатого интегратора 75, через тридцать четвертый усилитель 70 к входу восемнадцатого интегратора 76, через тридцать пятый усилитель 71 к входу девятнадцатого интегратора 77, а также через тридцать шестой усилитель 72 к входу двадцатого интегратора 78. Интегратор 73 выходом через тридцать седьмой усилитель 79 подключен к первому входу сумматора 91 и через тридцать восьмой усилитель 80 к первому входу сумматора 92. Интегратор 74 выходом через тридцать девятый усилитель 81 подключен ко второму входу сумматора 91 и через сороковой усилитель 82 ко второму входу сумматора 92. Интегратор 75 выходом через сорок первый усилитель 83 подключен к третьему входу сумматора 91 и через сорок второй усилитель 84 к третьему входу сумматора 92. Интегратор 76 выходом через сорок третий усилитель 85 подключен к четвертому входу сумматора 91 и через сорок четвертый усилитель 86 к четвертому входу сумматора 92. Интегратор 77 выходом через сорок пятый усилитель 87 подключен к пятому входу сумматора 91 и через сорок шестой усилитель 88 к пятому входу сумматора 92. Интегратор 78 выходом через сорок седьмой усилитель 89 подключен к шестому входу сумматора 91 и через сорок восьмой усилитель 90 к шестому входу сумматора 92.
Вторая ступень блока определения ошибок БИНС работает следующим образом.
На вход разностной схемы 65 подается сигнал х15, представляющий линейную комбинацию инструментальных ошибок корректируемой системы и определяемый по (51). На другой вход этой разностной схемы подается сигнал Нх с выхода сумматора 91, представляющий такую же линейную комбинацию только оценок инструментальных ошибок, полученных на выходе второй ступени (коэффициенты усиления усилителей 79, 81, 83, 85, 87. 89 равны элементам первой строки матрицы связи Н). Сформированный на выходе разностной схемы 5 сигнал (x15-Hx) усиливается усилителями 67-72 и подается на входы интеграторов 73-78. На вход разностной схемы 66 подается сигнал х25, представляющий линейную комбинацию инструментальных ошибок корректируемой системы и определяемый по (52). На другой вход этой разностной схемы подается сигнал Нх с выхода сумматора 92, представляющий такую же линейную комбинацию оценок инструментальных ошибок, полученных на выходе второй ступени, (коэффициенты усиления усилителей 80, 82, 84, 86, 88, 90 равны элементам второй строки матрицы связи H). Сформированный на выходе разностной схемы 66 сигнал (х25-Нх) усиливается усилителями 67-72 и подается на входы интеграторов 73-78. Таким образом, работа представленной на Фиг. 5 блок-схемы эквивалентна математическому выражению (56). На выходе второй ступени (при выполнении условий невырожденности матрицы Н, связанной с маневром объекта) получаем вектор оценок инструментальных ошибок корректируемой системы  , которые используются для коррекции выходных параметров первой ступени, как было сказано выше.
, которые используются для коррекции выходных параметров первой ступени, как было сказано выше.
Таким образом, рассмотренный блок определения ошибок БИНС представляет двухступенчатую структуру, представленную на Фиг. 3-5 при этом, ошибки системы Δω, γ, α, β оцениваются безусловно в любом режиме работы фильтра, а оценки инструментальных ошибок ν, ε могут быть получены только при выполнении определенных условий, связанных с маневром объекта и только по окончании переходного процесса на первой ступени. При невыполнении этих условий ошибки Δω, γ, α, β определяются из выходных переменных xij первой ступени алгоритма ((26)-(44)) подстановкой в эти выражения значений δω=0, δε=0. При выполнении условий, обеспечивающих эффективную работу второй ступени, полученные на выходе второй ступени оценки инструментальных ошибок δω=Aν, δε=Aε подставляются в перечисленные выше уравнения.
Из полученных результатов совершенно очевидно, что совместное использование скоростной и позиционной внешней информации для получения оценок ошибок и коррекции системы и построение двухступенчатого фильтра позволило существенно упростить способ получения оценки ошибок корректируемой системы, значительно снизив порядок системы (особенно первой ступени), что приводит к уменьшению времени переходного процесса и, тем самым, сокращению времени готовности, а при выполнении определенных условий (маневр объекта) - повышению точности оцениваемых параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, КОРРЕКТИРУЕМАЯ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668659C1 |
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634071C1 |
| НАВИГАЦИОННО-ПИЛОТАЖНЫЙ КОМПЛЕКС | 2016 |
|
RU2634083C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2017 |
|
RU2659755C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |

Изобретение относится к области навигационного приборостроения и может быть использовано при разработке комплексированных навигационных систем, в которых основная навигационная информация, поставляемая бесплатформенными инерциальными навигационными системами (БИНС), корректируется по позиционной и скоростной информации, поставляемой источниками внешней информации. Технический результат - упрощение способа получения оценки ошибок корректируемой системы, что приводит к уменьшению времени переходного процесса и сокращению времени готовности. Для этого предложенный способ определения ошибок БИНС по внешней позиционной и скоростной информации обеспечивает формирование вектора измерений как разности позиционной и скоростной информации, поставляемой внешним источником информации, и позиционной и скоростной информации, поставляемой корретируемой БИНС, с последовательной обработкой сформированного вектора измерений путем фильтрации с целью определения ошибок корректируемой системы, включая и инструментальные ошибки системы, при этом с целью повышения точности определения ошибок корретируемой системы и сокращения времени готовности получаемых оценок обработка сформированного вектора измерений проводится в два этапа, при этом на первом этапе безусловно определяются такие динамические ошибки системы, как позиционная ошибка, скоростные ошибки, ошибки построения вертикали и кинематические ошибки, включая и курсовую ошибку, а на втором этапе при выполнении условий наблюдаемости, связанных с маневром объекта, определяются систематические составляющие инструментальных ошибок системы, таких как нескомпенсированные дрейфы системы и ошибки акселерометров, и после определения этих ошибок проводится уточнение полученных оценок динамических ошибок системы. 12 ил.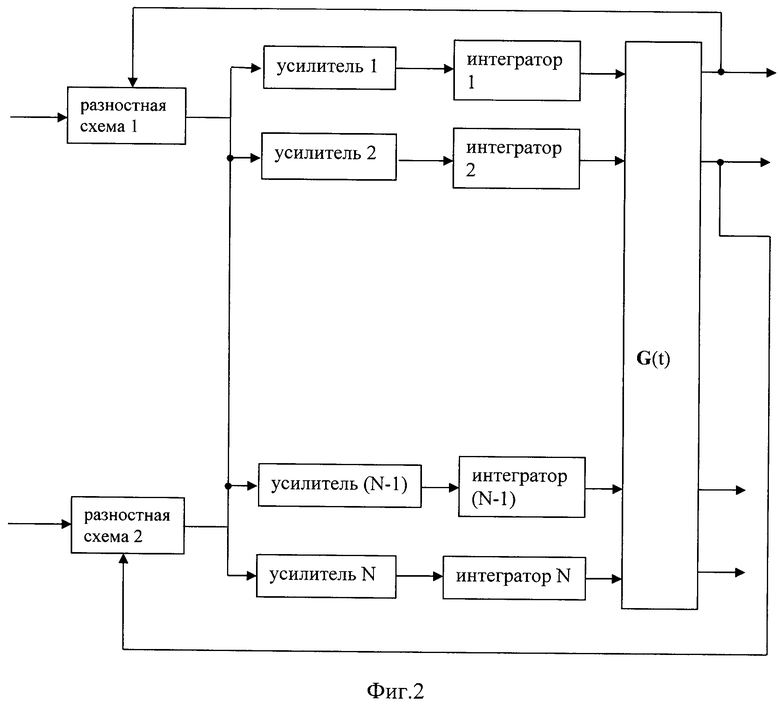
Способ определения ошибок бесплатформенной инерциальной системы (БИНС) по внешней позиционной и скоростной информации, заключающийся в формировании вектора измерений как разности позиционной и скоростной информации, поставляемой внешним источником информации, и позиционной и скоростной информации, поставляемой корректируемой БИНС, с последовательной обработкой сформированного вектора измерений путем фильтрации с целью определения ошибок корректируемой системы, включая и инструментальные ошибки системы, отличающийся тем, что с целью повышения точности определения ошибок корректируемой системы и сокращения времени готовности получаемых оценок обработка сформированного вектора измерений проводится в два этапа, при этом на первом этапе безусловно определяются такие динамические ошибки системы, как позиционная ошибка, скоростные ошибки, ошибки построения вертикали и кинематические ошибки, включая и курсовую ошибку, а на втором этапе при выполнении условий наблюдаемости, связанных с маневром объекта, определяются систематические составляющие инструментальных ошибок системы, таких как нескомпенсированные дрейфы системы и ошибки акселерометров, и после определения этих ошибок проводится уточнение полученных оценок динамических ошибок системы.
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| Ривкин С.С | |||
| Метод оптимальной фильтрации Калмана и его применение в инерциальных навигационных системах | |||
| - Л.: Судостроение, 1974 | |||
| Прибор для записи звуковых волн | 1920 |
|
SU219A1 |
| Шебшаевич B.C | |||
| и др | |||
| Сетевые спутниковые радионавигационные системы | |||
| - М.:"Радио и связь", 1993 | |||
| Микрофонно-телефонно-катодный усилитель | 1923 |
|
SU408A1 |
| US 4914598 А, 03.04.1990 | |||
| Основные группы геометрических преобразований, приведенные в табл | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| - М.: Наука | |||
| Физмат-лит, 1999 | |||
| Способ амидирования жидких сульфохлоридов ароматического ряда | 1921 |
|
SU316A1 |

