Изобретение относится к области радиотехники и может использоваться в системах пассивной радиолокации и радиотехнического наблюдения для однопозиционного определения координат, скоростей и траекторий перемещающихся в пространстве радиоизлучающих объектов (РИО) - искусственных спутников Земли, кораблей, самолетов, беспилотных летательных аппаратов.
Пассивные радиолокационные системы (РЛС) используют для измерения параметров движения РИО по излучениям их бортовых радиопередающих устройств. Эти РЛС имеют меньшую сложность и меньшую стоимость, чем активные РЛС, из-за отсутствия радиопередающей части. Они обладают высокой скрытностью, что существенно затрудняет определение их дислокации и характеристик. Для определения местоположения и траекторий движения РИО пассивными методами [1 - Пассивная радиолокация: методы обнаружения объектов / Под ред. проф. Р.П. Быстрова и проф. А.В. Соколова. М: Радиотехника. 2008. 320 с.] обычно применяют несколько разнесенных станций, объединенных с помощью ретрансляторов данных в многопозиционную систему. Но такая система, по сравнению с однопозиционной, имеет больший объем аппаратуры, повышенную сложность и стоимость.
Однопозиционная локация до недавнего времени не обеспечивала определение наклонных дальностей, скоростей и траекторий перемещающихся в пространстве РИО за счет измерения их угловых координат (УК) и параметров излучаемых сигналов. Поэтому поиск способов и создание устройств обзорной пассивной однопозиционной локации, обеспечивающих определение этих параметров с достаточной для практики точностью, являются актуальными.
Однопозиционные пассивные РЛС должны определять УК лоцируемых объектов с высокой точностью и за достаточно малое время, так как эти объекты могут перемещаться с большими (в том числе гиперзвуковыми) скоростями и двигаться по сложным непредсказуемым траекториям, причем закон их движения может содержать знакопеременные производные высоких порядков. Лучшей основой для достижения высокой точности определения УК лоцируемых объектов считается' широко применяемый в радиолокации и радиопеленгации моноимпульсный метод [2 - Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М: Радио и связь, 1984. 312 с., стр. 6]. УК РИО определяются путем измерения направления прихода принимаемых сигналов относительно известного равносигнального направления (РСН).
Пути достижения высокой точности определения УК и достаточного быстродействия обзорного амплитудного моноимпульсного пеленгатора обоснованы в [3 - Патент 2583849, РФ. Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки (варианты) и обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов / Джиоев А.Л., Омельчук И.С., Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявлен 13.04.2015, опубликован 10.05.2016]. В этой работе выбором вида весовой функции на раскрыве антенны и угла разноса диаграмм направленности (ДН) обеспечена пеленгационная характеристика (ПХ), практически линейная на всей ширине моноимпульсной группы лучей (МГЛ). После приема сигналов РИО и их аналого-цифрового преобразования (АЦП) используется прямоотсчетный метод, позволяющий использовать быстрый прямой и легко реализуемый (решение линейного уравнения) расчет УК с ошибкой не более 1/100 ширины ДН по уровню половинной мощности при низком уровне боковых лепестков (ниже минус 40 дБ) и приемлемом использовании поверхности антенны. Высокая линейность ПХ на всей ширине МГЛ, обеспечивающая быстрое и точное определение УК объекта без использования итерационного алгоритма, значительно сокращает время обзора пространства и увеличивает число объектов, контролируемых без перемещений РСН и повторных зондирований. Однако при этом не производится селекция лоцируемых объектов по скорости движения и не определяются их траектории в пространстве.
Известен способ измерения с одной позиции угловой скорости объекта [4 - Алпатов Б.А., Балашов О.Е. Измерение скорости объекта в системах автоматического сопровождения объектов // Вестник РГРТУ. Рязань. 2014. №4 (выпуск 50). С. 5-10]. В нем на основании угловых измерений определяют условную скорость объекта, пропорциональную, с постоянным коэффициентом, его реальной скорости, в предположении, что объект движется в пространстве равномерно и прямолинейно. При этом УК объекта измеряют в  временных моментах, отстоящих друг от друга на равные интервалы Т, затем из множества возможных (условных) параллельных траекторий движения, соответствующих измеренным УК, выбирают одну условную, на которой точки А, В и С равноудалены по времени на равные интервалы 0,5 NT, определяют проекции координат точек А, В, С в зависимости (функциональной) от соответствующих проекций линейной скорости, и наконец, задавшись значениями координат точки С, определяют значения проекций Vx, Vy, Vz текущей линейной скорости объекта, а также саму условную линейную скорость и экстраполированные значения УК. Однако в [4] не определяются истинные координаты, скорости и траектории движения РИО в пространстве.
временных моментах, отстоящих друг от друга на равные интервалы Т, затем из множества возможных (условных) параллельных траекторий движения, соответствующих измеренным УК, выбирают одну условную, на которой точки А, В и С равноудалены по времени на равные интервалы 0,5 NT, определяют проекции координат точек А, В, С в зависимости (функциональной) от соответствующих проекций линейной скорости, и наконец, задавшись значениями координат точки С, определяют значения проекций Vx, Vy, Vz текущей линейной скорости объекта, а также саму условную линейную скорость и экстраполированные значения УК. Однако в [4] не определяются истинные координаты, скорости и траектории движения РИО в пространстве.
Аналогом предлагаемого способа является [5 - Патент 2617830, РФ. Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа / Джиоев А.Л., Омельчук И.С., Тюрин Д.А., Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявлен 11.04.2016, опубликован 28.04.2017]. В нем во время приема констатируют обнаружение сигнала РИО и определяют его параметры - ширину спектра, среднюю частоту спектра сигнала и вид модуляции. Осуществляют автосопровождение выбранного объекта по угловым координатам, измеряют и запоминают значения отсчетов угловых координат (азимута β и угла места ε), а также текущего времени, соответствующего этим отсчетам. Затем восстанавливают, зная вид модуляции, несущую частоту ƒH принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов. Далее вычисляют приращения УК и доплеровских сдвигов частоты принимаемых сигналов на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО со скоростью V на постоянной высоте Н. После этого определяют горизонтальные составляющие приращений доплеровских сдвигов частоты, находят эти приращения и вычисляют величину их отношения
для нахождения величины угла α между вектором скорости и горизонтальной дальностью. Далее определяют текущее значение курсового угла qk=βk+α и модуль горизонтальной скорости Vг=V, а затем - расстояние S4,0, пройденное объектом за интервал времени Δt4,0. Затем находят радиус R окружности, проходящей через начало координат, хордой которой является расстояние S4,0, находят центр О' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90°, рассчитывают дальности d0 и d4, используя соотношение  в виде
в виде  и определяют координаты РИО в моменты времени t0 и t4 как точки пересечения окружности с центром О' и лучей длиной d0 и d4, проведенных из начала координат под углами β0 и β4.
и определяют координаты РИО в моменты времени t0 и t4 как точки пересечения окружности с центром О' и лучей длиной d0 и d4, проведенных из начала координат под углами β0 и β4.
Однако аналог [5] не лишен недостатков, к которым следует отнести:
1. Невозможность измерения дальностей, направлений и скоростей перемещения в пространстве, а также траекторий РИО в случаях их движения с переменной высотой полета, то есть с произвольными углами пикирования (кабрирования).
2. Необходимость использования двух алгоритмов функционирования с ограниченной областью применимости каждого из них:
- первого, применимого в случае изменений азимута и угла места РИО при его приближении (удалении) относительно РЛС,
- второго, применимого только при постоянном азимуте объекта.
3. Использование следящего режима работы РЛС, что, по сравнению с обзорным режимом, снижает ее производительность и число контролируемых объектов.
Наиболее близким по технической сущности к заявляемому способу является [6 - Патент 2557808, РФ. Способ определения наклонной дальности до движущейся цели пассивным моностатическим пеленгатором / Борисов Е.Г., Мартемьянов И.С. Заявлен 9.04.2014, опубликован 27.07.2015], принятый за прототип. В нем совместно обрабатывают два последовательных во времени измерения пеленгов (углов азимута β1 и β2) и мощностей РС1 и РС2 сигналов для моментов измерений t1 и t2. Учитывая, что базовая точка измерения соответствует геометрическому центру угломерной системы, а линия Ц1ЦN (траектория движения цели) соответствует точкам Ц1 и Ц2 измерения пеленга цели в моменты времени t1 и t2, в предположении, что цель движется прямолинейно, на основании полученных значений PC1 и РС2 вычисляют величину  Производят два последовательных измерения частот ƒ1 и ƒ2 принятых сигналов в моменты времени t1 и t2 соответственно, и на основании этих измерений определяют величину
Производят два последовательных измерения частот ƒ1 и ƒ2 принятых сигналов в моменты времени t1 и t2 соответственно, и на основании этих измерений определяют величину  далее на основании измеренных углов азимута β1 и β2 определяют Δβ21=β2-β1. После этого вычисляют дальность до цели по формуле
далее на основании измеренных углов азимута β1 и β2 определяют Δβ21=β2-β1. После этого вычисляют дальность до цели по формуле

где с - скорость распространения электромагнитных волн;
Т=Δt12.
Точностные характеристики прототипа [6] определяются ошибками измерения угловых координат РИО, несущих частот и мощностей излучаемых им сигналов. При предельно возможных точностях измерений углов и частот погрешность определения наклонной дальности зависит от ее значения и находится в пределах 5-35%, что не всегда приемлемо. Кроме того, в реальных условиях объекты наблюдения обычно излучают модулированные сигналы с подавленной несущей, что не позволяет применять способ [6]. Наконец, при использовании способа [6] измеряется мощность принимаемых сигналов, а она подвержена флюктуациям, которые вызываются интерференцией колебаний, переотраженных элементами конструкции объекта, изменениями условий распространения и переотражениями от местных предметов. Величина этих флюктуаций может достигать 10-15 дБ; погрешность измерения дальности по способу [6] при коэффициенте флюктуаций, равном 6 дБ, составляет 5%, а при коэффициенте флюктуаций, равном 12 дБ, достигает 250%, то есть способ становится неработоспособным.
Таким образом, недостатками прототипа [6] являются:
1. Большая погрешность измерения дальности при предельно возможных точностях измерений первичных параметров.
2. Невозможность измерения дальности в случае использования в качестве сигналов сложных модулированных излучений.
3. Необходимость измерения мощности принимаемых сигналов, которая подвержена флюктуациям, величина которых может достигать 10-15 дБ; при этом погрешность измерения дальности при коэффициенте флюктуаций, равном 6 дБ, составляет 5%, а при коэффициенте флюктуаций, равном 12 дБ, достигает 250%, то есть способ становится неработоспособным.
Изобретений, решающих упомянутые проблемы методами пассивной однопозиционной локации перемещающегося в пространстве по произвольным траекториям РИО, авторы заявляемого способа в технической литературе не обнаружили.
Техническая проблема, на решение которой направлен предлагаемый способ: определение координат, направлений и скоростей движения, а также построение траекторий всей совокупности РИО, движущихся в пространстве по произвольным направлениям равномерно и прямолинейно со всеми возможными курсовыми углами и углами пикирования (кабрирования).
Для решения этой технической проблемы предлагается способ пассивной однопозиционной угломерно-доплеровской локации (УДЛ) перемещающихся в пространстве радиоизлучающих объектов, при котором:
применяют для приема радиосигналов цифровую антенную решетку (ЦАР) или антенную решетку с цифровой обработкой сигналов,
формируют в пространстве, используя на раскрыве антенной решетки весовую функцию Хэмминга, моноимпульсную группу лучей с общим фазовым центром и пеленгационные характеристики с рабочими зонами ΔβПХ по азимуту и ΔεПХ по углу места, линейные на всей ширине МГЛ за счет специально выбранных углов смещения лучей βсм и εсм,
разбивают заданную область обзора пространства на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равносигнальное направление МГЛ в центры этих участков, осуществляют обзор упомянутой области,
принимают сигналы радиоизлучающих объектов в течение интервала наблюдения на каждом участке разбиения в заданном диапазоне частот, при появлении упомянутых сигналов констатируют обнаружение всей совокупности  объектов в упомянутой области обзора и определяют параметры их сигналов - ширину и среднюю частоту спектра, а также вид модуляции,
объектов в упомянутой области обзора и определяют параметры их сигналов - ширину и среднюю частоту спектра, а также вид модуляции,
описывают пространственное положение РИО, перемещающихся в пространстве равномерно и прямолинейно по траекториям с произвольными углами пикирования (кабрирования), текущими значениями угловых координат (азимута βТ и угла места εТ), векторов наклонных дальностей DT, абсолютных значений векторов скорости V и величин курсовых углов γk между векторами скоростей и наклонных дальностей,
измеряют и запоминают для каждого из обнаруженных объектов значения отсчетов βm, εm угловых координат m-го объекта, вычисляемых относительно равносигнальных направлений, как
βm=βPCH+Δβm, εm=εPCH+Δεm,
где 
 и
и  - сигналы угловых рассогласований с выходов угловых дискриминаторов длят m-го объекта;
- сигналы угловых рассогласований с выходов угловых дискриминаторов длят m-го объекта;
 и
и  - значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам
- значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам
β, ε при выбранных значениях смещений βсм и εсм лучей от равносигнальных направлений,
селектируют, используя данные об измеренных параметрах сигналов и угловых координатах, N объектов (из совокупности М), избранных для автосопровождения,
сглаживают, для снижения шума, значения измеренных угловых координат каждого объекта с помощью фильтров автосопровождения, представляя их в виде усредненных зависимостей  где
где  - номер наблюдаемого объекта,
- номер наблюдаемого объекта,
формируют для приема сигналов избранных объектов N одиночных лучей, наведение которых по угловым координатам осуществляется управляющими сигналами, сформированными на основании данных об угловых координатах сопровождаемых радиоизлучающих объектов,
параллельно принимают по N лучам и обрабатывают сигналы радиоизлучающих объектов, восстанавливают, зная вид модуляции, несущие частоты ƒHn принятых сигналов, измеряют и запоминают значения их отсчетов, сглаживают и представляют результаты в виде усредненных зависимостей 
интерполируют усредненные угловые зависимости  а также усредненную зависимость
а также усредненную зависимость  получая непрерывные функции β(t), ε(t) и ƒH (t), причем здесь и далее индекс n наблюдаемого объекта не указывается - расчет проводят для каждого из N объектов.
получая непрерывные функции β(t), ε(t) и ƒH (t), причем здесь и далее индекс n наблюдаемого объекта не указывается - расчет проводят для каждого из N объектов.
Согласно изобретению, в заявленном способе:
используют для оценки параметров движения объектов в пространстве наклонные плоскости 0A1Ak, образованные лучами OAk, участками A1Ak траекторий, где А1, А2, … Ak, … АК - точки на траектории движения РИО, в которых он находится в равноотстоящие моменты времени t1, t2, … tK, и лежащую вне траектории точку наблюдения, находящуюся в начале 0 системы координат Oxyz, при этом величины модулей векторов наклонных дальностей DT совпадают с длиной лучей OAk, векторы скоростей V направлены вдоль участков A1Ak траекторий, углы между лучами OAk и отрезками A1Ak являются курсовыми углами γk, а в качестве аналогов УК объектов используют углы ck,1 между векторами наклонных дальностей 0А1 и текущими значениями наклонных дальностей 0Ak, вычисляют величины углов ck,1, каждый из которых является гипотенузой сферического прямоугольного треугольника с катетами Δβk,1, Δεk,1 и равен угловому размеру проекции на небесную сферу пути объекта за время Δtk,1=tk-tl, в соответствии с формулой

где  - номера точек А1, А2, … Ak на траектории объекта в моменты времени t=t2, t3, … tk;
- номера точек А1, А2, … Ak на траектории объекта в моменты времени t=t2, t3, … tk;
Δβk,i=(βk-β1)⋅cos[min(εk, ε1)];
Δεk,1=εk-ε1;
βk=β(tk)
εk=ε(tk),
извлекают из зависимости ƒH(t) в моменты времени t1, t2, … tk значения ƒHk, вследствие эффекта Доплера равные

где ƒH0 - значение несущей частоты сигнала наблюдаемого объекта в состоянии покоя;
ƒДk - доплеровский сдвиг несущей частоты;
λ - длина волны сигнала объекта,
и определяют их приращения на интервалах Δt2,1 и Δt3,1, равные


вычисляют величину отношения приращений несущей, получая уравнение относительно курсового угла γ1, решая которое определяют его предварительное значение
где 
и предварительное значение модуля вектора скорости объекта
где с=299792458 м/с - скорость распространения электромагнитных волн,
рассчитывают на основе полученных оценок предварительное значение несущей частоты сигнала объекта, условно находящегося в покое, как
вычисляют уточненное значение ƒH0 несущей частоты сигнала РИО, находящегося в покое, как частоту колебаний цифрового генератора, управляемого сигналом автоподстройки, формируемым в результате сравнения приращений частот Δƒk,k-1=ƒk-ƒk-1 и 
определяют в моменты времени tk и запоминают совместно со значениями углов ck+1,k доплеровские сдвиги частот сигналов ƒДk=ƒk-ƒH0 объекта, извлекают из памяти значения доплеровских сдвигов частоты ƒД1 и ƒД2, а также угла с2,1,
вычисляют отношение доплеровских сдвигов
и получают уравнение относительно наклонного курсового угла γ1, решая которое определяют значение
повторяют расчеты значения ctg γ1 для Р моментов времени tk и определяют
где k=2, 3, … Р, …, K,
вычисляют усредненное значение величины
а также усредненное значение пространственного курсового угла
и текущие значения курсовых углов 
определяют, используя найденное усредненное значение курсового угла  , величину модуля скорости радиоизлучающего объекта как
, величину модуля скорости радиоизлучающего объекта как
и длину пути, пройденного объектом между точками траектории A1 и Ak

где k=2, 3, …, K,
определяют пространственное местоположение объекта точками пересечения на наклонных плоскостях 0A1Ak лучей, исходящих из начала координат под углами ck,1 относительно луча 0А1, и окружностей с центрами  хордами которых являются отрезки пути Sk,1, а радиусы равны
хордами которых являются отрезки пути Sk,1, а радиусы равны
фиксируют центры  упомянутых окружностей как точки на концах лучей длиной Rk, проведенных из начала координат под углами ψk относительно луча 0А1 и равных
упомянутых окружностей как точки на концах лучей длиной Rk, проведенных из начала координат под углами ψk относительно луча 0А1 и равных

вычисляют значение наклонной дальности в случае нахождения объекта в точке А1

значения наклонных дальностей при нахождении объекта в точках Ak траектории
а также значения модуля скорости радиоизлучающего объекта при нахождении его в точках Ak траектории
осуществляют построение траекторий объектов, используя измеренные и рассчитанные значения их угловых координат, наклонных дальностей, курсовых углов и скоростей перемещения,
определяют величину разности |V|k-|V|1=Δ|V|k,1 и производят сравнение полученной величины с пороговым значением
в случае, когда Δ|V|k,1>|V|n, констатируют начало маневра объекта, и для дальнейшего построения его траектории на следующем участке ее кусочно-линейной аппроксимации повторяют расчеты курсовых углов, скоростей и дальностей по вышеприведенным формулам.
Техническим результатом, достигаемым в результате создания предлагаемого изобретения, является возможность однопозиционного измерения направлений, скоростей и траекторий движения РИО, перемещающихся в пространстве равномерно прямолинейно в пределах контролируемого сектора с произвольными курсовыми углами и углами пикирования (кабрирования).
Предлагаемое изобретение не известно в современной радиотехнике, а также не известны источники информации, содержащие сведения об аналогичных технических решениях, имеющих признаки, сходные с признаками, отличающими заявляемое решение от прототипа, а также имеющих свойства, совпадающие со свойствами заявляемого решения, поэтому можно считать, что оно обладает существенными отличиями, вытекает из них неочевидным образом и, следовательно, соответствует критериям «новизна» и «изобретательский уровень».
Сущность изобретения поясняется следующими фигурами:
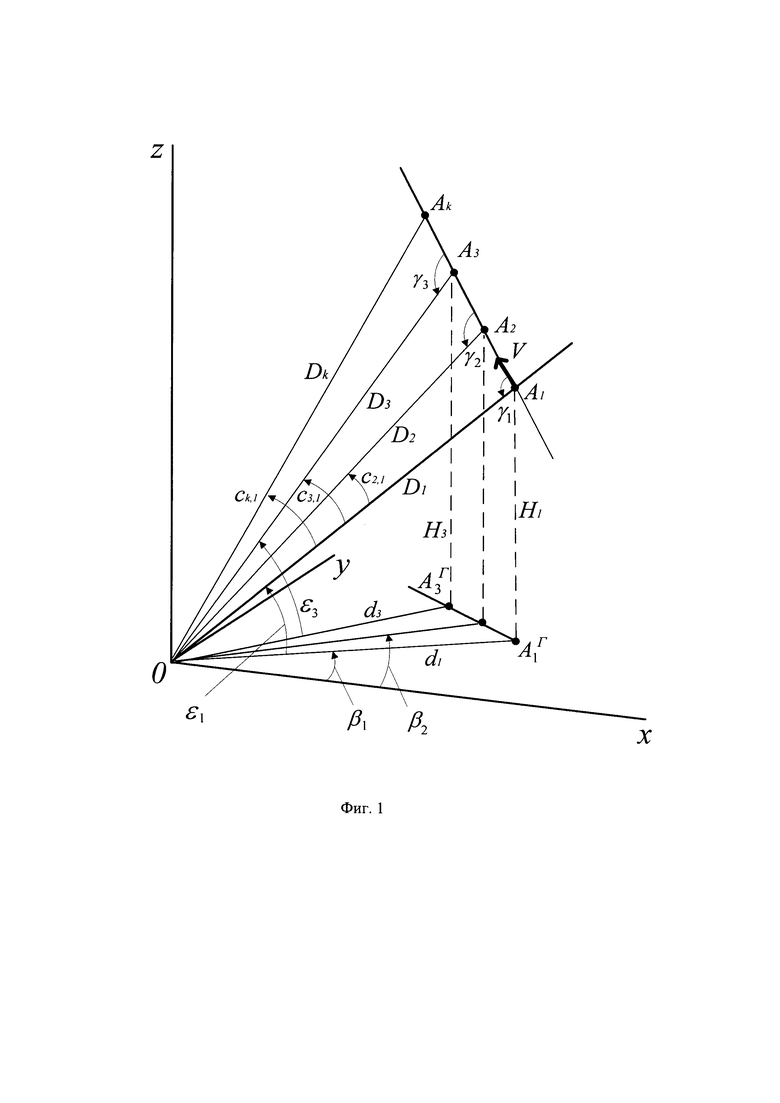
фигура 1 - геометрии задачи в пространстве с использованием сферической системы координат;
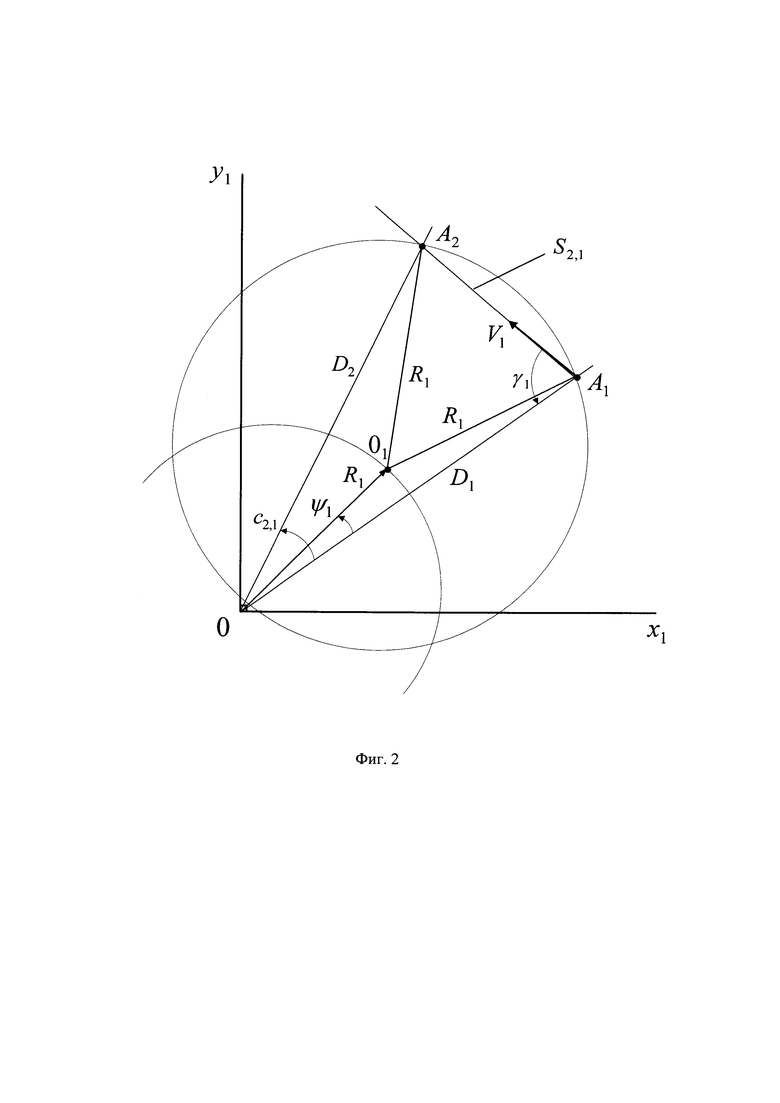
фигура 2 - геометрии задачи на вспомогательной наклонной плоскости;
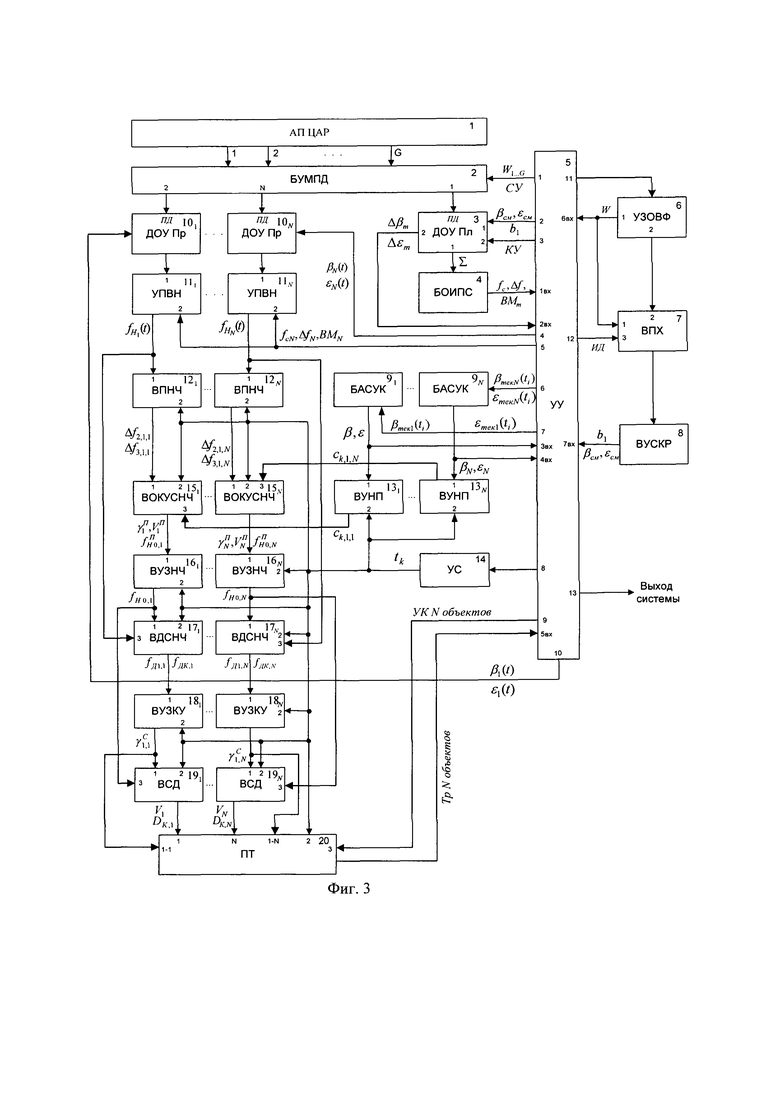
фигура 3 - схема электрическая структурная системы, реализующей предложенный способ;
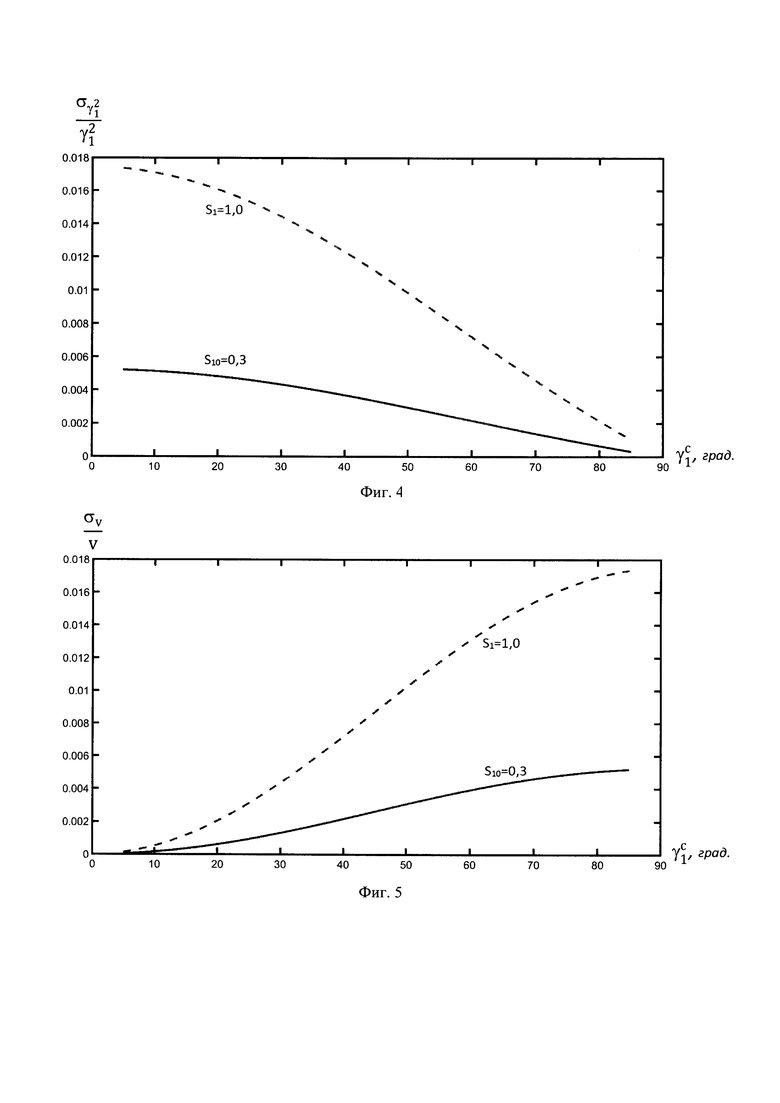
фигура 4 - графики зависимостей погрешности определения пространственного курсового угла от величины этого угла;
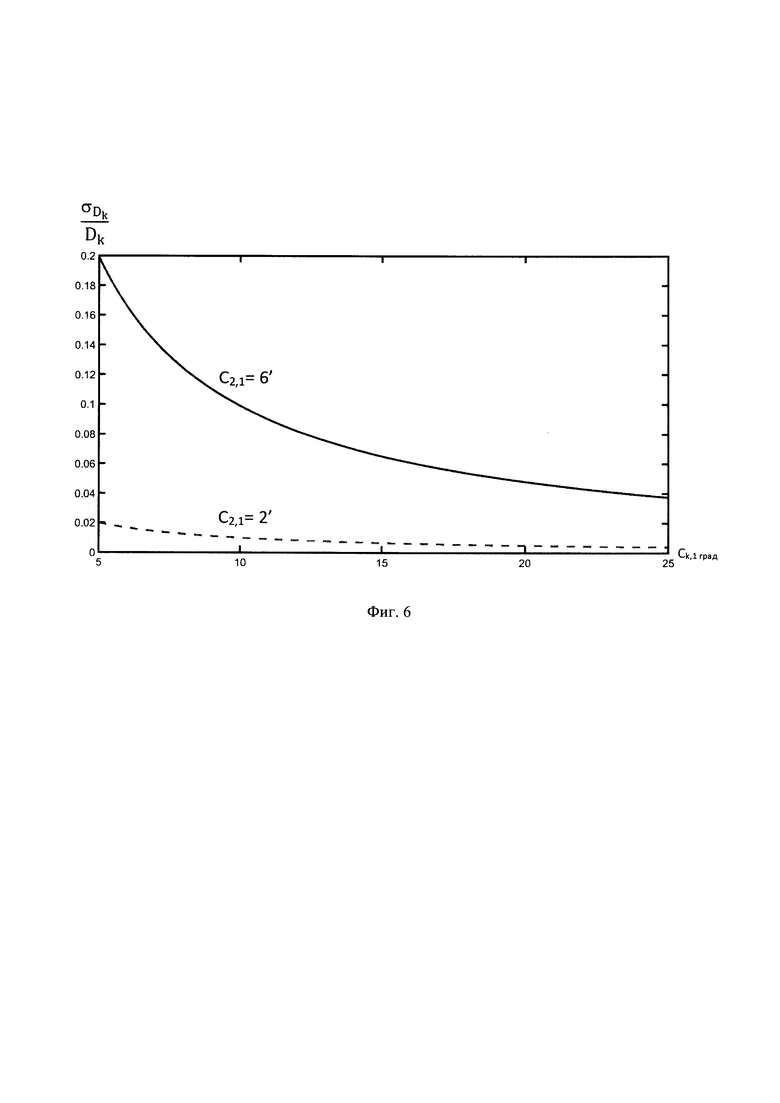
фигура 5 - графики зависимостей погрешности определения скорости РИО от величины пространственного курсового угла;
фигура 6 - графики зависимостей погрешности определения наклонной дальности от величины угла  на наклонных плоскостях 0A1Ak.
на наклонных плоскостях 0A1Ak.
При реализации предложенного способа выполняется следующая последовательность операций.
1. Применяют для приема радиосигналов ЦАР или антенную решетку с цифровой обработкой сигналов.
2. Формируют в пространстве, используя на раскрыве антенной решетки весовую функцию W(x, у) Хэмминга, моноимпульсную группу лучей с общим фазовым центром и ПХ с рабочими зонами ΔβПХ по азимуту и ΔεПХ по углу места, линейные на всей ширине моноимпульсной группы лучей за счет специально выбранных в соответствии с методом, изложенным в [3], углов смещения лучей βсм и εсм.
3. Разбивают заданную область обзора пространства (телесный угол) на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая РСН моноимпульсной группы лучей в центры этих участков, осуществляют обзор упомянутой области.
4. Принимают сигналы РИО в течение интервала наблюдения на каждом участке разбиения в заданном диапазоне частот, при появлении упомянутых сигналов констатируют обнаружение всей совокупности  объектов в упомянутой области обзора и определяют параметры их сигналов - ширину и среднюю частоту спектра, а также вид модуляции.
объектов в упомянутой области обзора и определяют параметры их сигналов - ширину и среднюю частоту спектра, а также вид модуляции.
5. Описывают пространственное положение РИО, перемещающихся в пространстве равномерно и прямолинейно по траекториям с произвольными углами пикирования (кабрирования), текущими значениями угловых координат (азимута βТ и угла места εТ), векторов наклонных дальностей DT, абсолютных значений векторов скорости V и величин курсовых углов γk между векторами скоростей и векторами наклонных дальностей (фиг. 1).
6. Измеряют и запоминают для каждого из обнаруженных объектов значения отсчетов βm, εm угловых координат m-го объекта, вычисляемых относительно равносигнальных направлений, как


где 
 - сигналы угловых рассогласований с выходов угловых дискриминаторов для m-го объекта;
- сигналы угловых рассогласований с выходов угловых дискриминаторов для m-го объекта;
 - значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях смещений βсм и εсм лучей от равносигнальных направлений.
- значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях смещений βсм и εсм лучей от равносигнальных направлений.
7. Селектируют, используя данные об измеренных параметрах сигналов и угловых координатах, N объектов (из совокупности М), избранных для автосопровождения.
8. Сглаживают значения измеренных УК каждого объекта с помощью фильтров автосопровождения, представляя их в виде усредненных зависимостей 
 где
где  - номер наблюдаемого объекта.
- номер наблюдаемого объекта.
9. Для приема сигналов избранных объектов формируют в пространстве дополнительно N одиночных лучей, наведение которых по угловым координатам осуществляется управляющими сигналами, сформированными на основании данных об УК сопровождаемых РИО.
10. Параллельно принимают по N лучам и обрабатывают сигналы РИО, восстанавливают, зная вид модуляции, несущие частоты ƒHn принятых сигналов, измеряют и запоминают значения их отсчетов, сглаживают и представляют результаты в виде усредненных зависимостей 
11. Интерполируют усредненные угловые зависимости  а также усредненную зависимость
а также усредненную зависимость  получая непрерывные функции β(t), ε(t) и ƒH(t) причем здесь и далее индекс n наблюдаемого объекта не указывается - расчет проводят для каждого из N объектов.
получая непрерывные функции β(t), ε(t) и ƒH(t) причем здесь и далее индекс n наблюдаемого объекта не указывается - расчет проводят для каждого из N объектов.
12. Используют для оценки параметров движения объектов в пространстве наклонные плоскости 0A1Ak, образованные лучами OAk, участками A1Ak траекторий, где А1, А2, … Ak, … АК - точки на траектории движения РИО, в которых он находится в равноотстоящие моменты времени t1, t2, … tK, и лежащую вне траектории точку наблюдения, находящуюся в начале 0 системы координат 0xyz, при этом величины модулей векторов наклонных дальностей DT совпадают с длиной лучей OAk, векторы скоростей V направлены вдоль участков A1Ak траекторий, углы между лучами OAk и отрезками A1Ak являются курсовыми углами γk, а в качестве аналогов УК объектов используют углы ck,1 между векторами наклонных дальностей 0A1 и текущими значениями наклонных дальностей 0Ak (фиг. 2).
13. Вычисляют величины углов ck,1, каждый из которых является гипотенузой сферического прямоугольного треугольника с катетами Δβk,1, Δεk,1 и равен угловому размеру проекции на небесную сферу пути объекта за время Δtk,1=tk-t1, в соответствии с формулой

где  - номера точек А1, А2, … Ak на траектории объекта в моменты времени t=t2, t3, … tk,
- номера точек А1, А2, … Ak на траектории объекта в моменты времени t=t2, t3, … tk,
Δβk,1=(βk-β1)⋅cos[min(εk, ε1)];
Δεk,1=εk-ε1;
βk=β(tk);
εk=ε(tk).
14. Извлекают из зависимости ƒH(t) в моменты времени t1, t2, … tk значения ƒHk, вследствие эффекта Доплера равные

где ƒH0 - значение несущей частоты сигнала наблюдаемого объекта в состоянии покоя;
ƒДk - доплеровский сдвиг несущей частоты;
λ - длина волны сигнала объекта,
и определяют их приращения на интервалах Δt2,1 и Δt3,1, равные


15. Вычисляют величину отношения приращений несущей, получая уравнение относительно курсового угла γ1, решая которое определяют его предварительное значение

где 
и предварительное значение модуля вектора скорости объекта

где с=299792458 м/с - скорость распространения электромагнитных волн.
16. Рассчитывают на основе полученных оценок предварительное значение несущей частоты сигнала объекта, условно находящегося в покое, как
17. Вычисляют уточненное значение ƒH0 несущей частоты сигнала РИО, находящегося в покое, как частоту колебаний цифрового генератора, управляемого сигналом автоподстройки, формируемым в результате сравнения приращений частот Δƒk,k-1=ƒk-ƒk-1 и 
18. Определяют в моменты времени tk и запоминают совместно со значениями углов ck+1,k доплеровские сдвиги частот сигналов ƒДк=ƒk-ƒH0 радиоизлучающего объекта, извлекают из памяти значения доплеровских сдвигов частоты ƒД1 и ƒД2, а также угла с2,1.
19. Вычисляют отношение доплеровских сдвигов

и получают уравнение относительно наклонного курсового угла γ1, решая которое определяют значение

20. Повторяют расчеты ctg γ1 для Р моментов времени tk и определяют

где k=2, 3, … Р, … K,
вычисляют усредненное значение величины

а также усредненное значение пространственного курсового угла

и текущие значения курсовых углов

21. Определяют, используя найденное усредненное значение курсового угла  величину модуля скорости РИО как
величину модуля скорости РИО как

и длину пути, пройденного объектом между точками траектории А1 и Ak

где k=2, 3, … K.
22. Определяют пространственное местоположение объекта точками пересечения на наклонных плоскостях 0A1Ak лучей, исходящих из начала координат под углами ck,1 относительно луча 0А1, и окружностей с центрами  хордами которых являются отрезки пути Sk,1, а радиусы равны
хордами которых являются отрезки пути Sk,1, а радиусы равны
и фиксируют центры  упомянутых окружностей как точки на концах лучей длиной Rk, проведенных из начала координат под углами ψk относительно луча 0А1 (фиг. 2), равных
упомянутых окружностей как точки на концах лучей длиной Rk, проведенных из начала координат под углами ψk относительно луча 0А1 (фиг. 2), равных 
23. Вычисляют значение наклонной дальности в случае нахождения объекта в точке А1

значения наклонных дальностей при нахождении объекта в точках Ak траектории

а также значения модуля скорости РИО при нахождении его в точках Ak траектории

24. Осуществляют построение траекторий объектов, используя измеренные и рассчитанные значения их угловых координат, наклонных дальностей, курсовых углов и скоростей перемещения.
25. Определяют величину разности |V|k-|V|1=Δ|V|k,1 и производят сравнение полученной величины с пороговым значением

26. В случае, когда Δ|V|k,1>|V|n, констатируют начало маневра объекта, и для дальнейшего построения его траектории на следующем участке ее кусочно-линейной аппроксимации повторяют расчеты курсовых углов, скоростей и дальностей по вышеприведенным формулам.
После этого осуществляют построение траектории РИО в пространстве на всем интервале наблюдения, используя измеренные и рассчитанные значения УК, дальности, скорости и курсовых углов, при необходимости осуществляя пересчет координат в цилиндрическую или декартовую систему.
Так как вышеприведенные операции угломерно-доплеровского способа локации реализуются в процессе перемещения РИО относительно неподвижного пассивного измерителя, то этот способ является инверсно-кинематическим, величина пути Sk,1 - псевдобазой, а лучи 0Ak и окружности с центрами  - линиями положения.
- линиями положения.
Примером реализации предложенного способа является пассивная однопозиционная угломерно-доплеровская РЛС, структурная схема которой приведена на фиг. 3, где приняты следующие обозначения:
1 - антенное полотно цифровой антенной решетки (АП ЦАР), каналы которого содержат антенные элементы, малошумящие усилители (МШУ) и АЦП;
2 - блок умножителей и маршрутизатор потока данных (БУМПД);
3 - диаграммообразующее устройство пеленгатора (ДОУ Пл);
4 - блок обнаружения и измерения параметров сигналов (БОИПС);
5 - устройство управления (УУ);
6 - устройство запоминания отсчетов весовой функции (УЗОВФ);
7 - вычислитель пеленгационной характеристики (ВПХ);
8 - вычислитель оптимального угла смещения максимумов ДН от РСН и коэффициентов разложения функции, описывающей ПХ (ВУСКР);
91, …, 9N - блоки автосопровождения по угловым координатам (БАСУК);
101, …, 10N - диаграммообразующие устройства каналов приема сигналов (ДОУ Пр);
111, …, 11N - устройства приема и восстановления несущих частот (УПВН);
121, …, 12N - вычислители приращений несущих частот (ВПНЧ);
131, …, 13N - вычислители углов на наклонных плоскостях (ВУНП);
14 - устройство синхронизации (УС);
151, … 15N - вычислители оценочных значений курсовых углов, скоростей и несущих частот (ВОКУСНЧ);
161, …, 16N - вычислители уточненных значений несущих частот (ВУЗНЧ);
171, …, 17N - вычислители доплеровских сдвигов несущих частот (ВДСНЧ);
181, …, 18N - вычислители усредненных значений курсовых углов (ВУЗКУ);
191, … 19N - вычислители скоростей и наклонных дальностей (ВСД);
20 - построитель траекторий (ПТ).
Здесь использованы сокращения: ВМ - вид модуляции, ИД - исходные данные, КУ - команда управления, ПД - поток данных, СУ - сигнал управления, Тр - траектории, УК -угловые координаты.
Пассивная однопозиционная угломерно-доплеровская РЛС содержит (фиг. 2) АП ЦАР 1, в которое входят антенные элементы, МШУ и АЦП, и соединенный с ним линиями передачи 1…G БУМПД 2. Первый выход БУМПД 2 подключен к ДОУ Пл 3 (вход ПД), первый (суммарный) выход которого соединен со входом БОИПС 4, выход которого подключен к первому входу УУ 5. К шестому входу УУ 5 подключен первый выход УЗОВФ 6, подключенный также к первому входу ВПХ 7. Одиннадцатый выход УУ 5 соединен со входом УЗОВФ 6, а двенадцатый выход - с третьим входом ВПХ 7. Второй выход УЗОВФ 6 соединен со вторым входом ВПХ 7, выход которого соединен со входом ВУСКР 8, а выход ВУСКР 8 подключен к седьмому входу УУ 5.
Второй выход ДОУ Пл 3 (разностный) соединен со вторым входом УУ 5, шестой и седьмой выходы которого подключены ко входам соответственно БАСУК 9N и БАСУК 91. Первый выход УУ 5 соединен с отдельным управляющим входом БУМПД 2, а второй и третий выходы УУ 5 - соответственно с первым и вторым отдельными входами ДОУ Пл 3. Четвертый выход УУ 5 подключен к отдельному входу ДОУ Пр 10N, а десятый выход УУ 5 - к отдельному входу ДОУ Пр 101. Входы ПД устройств от ДОУ Пр 101 по ДОУ Пр 10N соединены соответственно с выходами от второго по N-го БУМПД 2, а выходы ДОУ Пр 101 и ДОУ Пр 10N - с первыми входами соответственно УПВН 111 и УПВН 11N, ко вторым входам которых подключен пятый выход УУ 5.
Выход БАСУК 91 подключен к первому входу ВУНП 131 и третьему входу УУ 5, а выход БАСУК 9N - к первому входу ВУНП 13N и четвертому входу УУ 5. Восьмой выход УУ 5 соединен со входом УС 14, девятый выход УУ 5 - с третьим входом ПТ 20, а пятый вход УУ 5 - с выходом ПТ 20.
В состав РЛС введены вновь ВОКУСНЧ 151 … ВОКУСНЧ 15N, ВУЗНЧ 161… ВУЗНЧ 16N, ВДСНЧ 171 … ВДСНЧ 17N, ВУЗКУ 181 … ВУЗКУ 18N и ВСД 191 … ВСД 19N.
Выход УПВН 111 подключен к первому входу ВПНЧ 121 и третьему входу ВДСНЧ 171, а выход УПВН 11N - к первому входу ВПНЧ 12N и третьему входу ВДСНЧ 17N. Выход ВПНЧ 121 подключен к первому входу ВОКУСНЧ 151, а выход ВПНЧ 12N - к первому входу ВОКУСНЧ 15N. Выход ВУНП 131 подключен к третьему входу ВОКУСНЧ 151, а выход ВУНП 13N - к третьему входу ВОКУСНЧ 15N. Выход УС 14 соединен со вторыми входами ВПНЧ 121, … ВПНЧ 12N, ВУНП 131 … ВУНП 13N, ВОКУСНЧ 151 … ВОКУСНЧ 15N, ВУЗНЧ 161 … ВУЗНЧ 16N, ВДСНЧ 171… ВДСНЧ 17N, ВУЗКУ 181 … ВУЗКУ 18N, ВСД 191 … ВСД 19N и ПТ 20. При этом выход ВОКУСНЧ 151 … ВОКУСНЧ 15N подключен к первому входу соответственно ВУЗНЧ 161… ВУЗНЧ 16N, а выход ВУЗНЧ 161… ВУЗНЧ 16N - к первому входу ВДСНЧ 171 … ВДСНЧ 17N и третьему входу ВСД 191… ВСД 19N.
Выход ВДСНЧ 171 … ВДСНЧ 17N подключен к первому входу соответственно ВУЗКУ 181 … ВУЗКУ 18N, а выход ВУЗКУ 181 … ВУЗКУ 18N - к первому входу ВСД 191 … ВСД 19N и ПТ20 (входы 1-1 … 1-N). Выход ВСД 191 … ВСД 19N также подключен к ПТ 20 (входы 1 … N).
Выходом системы является тринадцатый выход УУ 5.
РЛС работает следующим образом. После включения электропитания антенные элементы цифровой антенной решетки из состава АП ЦАР 1 принимают радиосигналы РИО, приходящие из заданной области обзора пространства (телесного угла), которые далее усиливаются, преобразуются на промежуточную частоту и подвергаются аналого-цифровому преобразованию. С выходов АП ЦАР 1 отсчеты смеси сигналов РИО и шумов поступают на входы блока умножителей и маршрутизатор потока данных БУМПД 2, где осуществляется их весовая обработка путем умножения на отсчеты функции W(x, у) Хэмминга, которые поступают в БУМПД 2 с первого выхода устройства управления УУ 5. Эти отсчеты извлекаются из УЗОВФ 6 (выход 1) по команде, поступающей в УЗОВФ 6 из УУ 5 (выход 11).
С выходов шины БУМПД 2 потоки данных поступают на диаграммообразующее устройство пеленгатора ДОУ Пл 3 и на диаграммообразующие устройства каналов приема сигналов ДОУ Пр 101…ДОУ Пр 10N. В ДОУ Пл 3 формируют моноимпульсную группу лучей с общим фазовым центром, состоящую из двух пар смещенных на углы βсм и εсм парциальных лучей в азимутальной и угломестной плоскостях и суммарного луча. Углы βсм и εсм определяются путем предварительного моделирования процесса приема и обработки сигналов амплитудного суммарно-разностного пеленгатора, с использованием задаваемых параметров ЦАР, в ВПХ 7 и ВУСКР 8, откуда они поступают на седьмой вход УУ 5. После этого в ВПХ 7 и ВУСКР 8 производится расчет рабочих зон ΔβПХ по азимуту и ΔεПХ по углу места, в пределах которых обеспечивается линейность пеленгационных характеристик с ошибкой, не превышающей 0,01 ширины ДН по уровню половинной мощности, и коэффициентов  линейных частей разложений ПХ в ряды Маклорена.
линейных частей разложений ПХ в ряды Маклорена.
В устройстве управления УУ 5 формируются сигналы управления СУ и наборы фазовых распределений W, использование которых позволяет с помощью ДОУ Пл 3 осуществить обзор заданной области пространства за счет последовательной установки РСН МГЛ в центры рабочих зон ΔβПХ и ΔεПХ. В процессе обзора принимают сигналы РИО по суммарному каналу, и в БОИПС 4 производят спектральный анализ заданного диапазона частот, обнаружение всей совокупности М сигналов РИО и измерение в течение интервала наблюдения на каждом участке разбиения их параметров: значений средних частот спектра, ширины спектров и видов модуляции сигналов. В ДОУ Пл 3 для каждого из обнаруженных сигналов осуществляют определение значений отсчетов относительно РСН угловых координат Δβm и Δεm путем решения линейных уравнений

и
где  - сигналы угловых рассогласований с выходов угловых дискриминаторов.
- сигналы угловых рассогласований с выходов угловых дискриминаторов.
Полученные данные передают в УУ 5, где на их основе селектируют N объектов (из совокупности М), избранных для автосопровождения, и вычисляют значения их УК в виде сумм
βтек n(ti)=βPCH n +Δβn
εтек n(ti)=εPCH n+Δεn,
где  - номер наблюдаемого объекта.
- номер наблюдаемого объекта.
Полученные значения угловых координат сглаживаются в блоках автосопровождения по угловым координатам БАСУК 91 … БАСУК 9N, а затем вновь поступают в УУ 5, где по их усредненным значениям  формируются наборы фазовых распределений полей в раскрыве ЦАР, которые используются в диаграммообразующих устройствах каналов приема сигналов ДОУ Пр 101 … ДОУ Пр 10N для формирования N одиночных ДН приема сигналов выбранных объектов. Отсчеты смеси сигналов РИО и шумов с выходов ДОУ Пр 101 … ДОУ Пр 10N поступают в устройства приема и восстановления несущих частот УПВН 111 … УПВН 11N, в которых осуществляют их согласованную с видом спектра фильтрацию и восстанавливают на основе известного вида модуляции, а затем фильтруют с помощью систем фазовой автоподстройки частоты их несущие частоты, образуя усредненные зависимости
формируются наборы фазовых распределений полей в раскрыве ЦАР, которые используются в диаграммообразующих устройствах каналов приема сигналов ДОУ Пр 101 … ДОУ Пр 10N для формирования N одиночных ДН приема сигналов выбранных объектов. Отсчеты смеси сигналов РИО и шумов с выходов ДОУ Пр 101 … ДОУ Пр 10N поступают в устройства приема и восстановления несущих частот УПВН 111 … УПВН 11N, в которых осуществляют их согласованную с видом спектра фильтрацию и восстанавливают на основе известного вида модуляции, а затем фильтруют с помощью систем фазовой автоподстройки частоты их несущие частоты, образуя усредненные зависимости 
Далее, считая движение сопровождаемых объектов на интервале времени Δtk,1=tk-t1 равномерно-прямолинейным со всеми возможными курсовыми углами и углами пикирования (кабрирования), для каждого РИО в вычислителях углов на наклонных плоскостях ВУНП 131 … ВУНП 13N определяются, под управлением устройства синхронизации УС 14, с использованием формулы (3), углы ck,1, каждый из которых является гипотенузой сферического прямоугольного треугольника с катетами Δβk,1 и Δεk,1 равен угловому размеру проекции на небесную сферу пути объекта за время Δtk,l=tk-t1, а в вычислителях приращений несущих частот ВПНЧ 121 … ВПНЧ 12N - значения на тех же интервалах времени приращений несущих ΔƒHk,1 по формулам (5,6), обусловленные эффектом Доплера.
Результаты расчетов величин углов ck,1 и приращений несущих ΔƒHk,1 поступают в ВОКУСНЧ 151 … ВОКУСНЧ 15N, в которых, в соответствии с формулами (7-9), осуществляются расчеты предварительных значений курсовых углов  модулей векторов скоростей |V|П объектов и предварительных значений несущих частот
модулей векторов скоростей |V|П объектов и предварительных значений несущих частот  сигналов РИО, находящихся в покое. С использованием значений
сигналов РИО, находящихся в покое. С использованием значений  в ВУЗНЧ 161 … ВУЗНЧ 16N рассчитываются уточненные значения ƒH0 несущих частот сигналов РИО, находящихся в покое. В ВДСНЧ 171 … ВДСНЧ 17N и ВУЗКУ 181 … ВУЗКУ 18N определяются, в соответствии с формулами (10-15), величины усредненных значений пространственных курсовых углов
в ВУЗНЧ 161 … ВУЗНЧ 16N рассчитываются уточненные значения ƒH0 несущих частот сигналов РИО, находящихся в покое. В ВДСНЧ 171 … ВДСНЧ 17N и ВУЗКУ 181 … ВУЗКУ 18N определяются, в соответствии с формулами (10-15), величины усредненных значений пространственных курсовых углов  и значения текущих курсовых углов γk. Далее в ВСД 191 … ВСД 19N с использованием значений ΔƒД,
и значения текущих курсовых углов γk. Далее в ВСД 191 … ВСД 19N с использованием значений ΔƒД,  определяются значения модулей скоростей |V|k и наклонных дальностей Dk при нахождении объектов в точках Ak их траекторий, определяют величины разности |V|k-|V|1=Δ|V|k,1, производят их сравнение с пороговыми значениями Δ|V|n и в случае, когда Δ|V|k,1>|V|n, констатируют начало маневра объекта.
определяются значения модулей скоростей |V|k и наклонных дальностей Dk при нахождении объектов в точках Ak их траекторий, определяют величины разности |V|k-|V|1=Δ|V|k,1, производят их сравнение с пороговыми значениями Δ|V|n и в случае, когда Δ|V|k,1>|V|n, констатируют начало маневра объекта.
После этого в ПТ 20 осуществляют построение траекторий РИО в течение всего времени наблюдения, используя измеренные и рассчитанные значения УК, скоростей и курсовых углов, а в случае обнаружения маневра объекта осуществляют повторные расчеты по вышеприведенным формулам. Результаты выдаются потребителям через УУ 5.
Реализация предложенной РЛС на базе имеющихся заделов по созданию ЦАР и устройств цифровой обработки сигналов не встретит существенных трудностей.
Оценку точности измерения параметров движения РИО предложенным способом УДЛ в зависимости от погрешностей измерения первичных параметров - угловых координат объектов и доплеровских сдвигов частоты излучаемых ими сигналов - произведем на основании теоремы о линеаризации функции нескольких случайных аргументов, считая, что указанные погрешности подчиняются нормальному закону распределения и являются некоррелированными.
Методы цифровой обработки сигналов позволяют производить измерения их частотных и временных параметров с относительной погрешностью не хуже 10-5…10-7, в то время как относительные погрешности измерения УК даже при использовании антенных систем с большой апертурой находятся в пределах 10-2…10-4. Поэтому основной вклад в ошибки измерения параметров движения РИО вносят погрешности измерения их УК. Так как пересчеты УК РИО в углы ck,1 на наклонной плоскости 0А1АК не вносят ошибок, то оценки погрешностей измерения параметров движения РИО по предложенному способу УДЛ будем искать в функциональной зависимости от углов ck,1 на наклонной плоскости, что эквивалентно реальному расчету параметров движения объекта в пространстве.
В предложенном способе УДЛ усредненное значение пространственного курсового угла при нахождении объекта в точке А1 (см. фиг. 1) определяется выражением (14) и составляет

в котором К-тое значение котангенса угла γ1 связано со значениями углов ck+1,1 на наклонной плоскости и доплеровских сдвигов частоты формулой (12), а индекс К определяет номер измерений параметров угла ck+1,1 на наклонной плоскости и частоты ƒДK+1.
В соответствии с вышеизложенными положениями величина среднеквадратического отклонения угла γ1 от среднего значения  определяется как
определяется как

где  - среднеквадратическая погрешность измерения угла сК+1,1.
- среднеквадратическая погрешность измерения угла сК+1,1.
Выполняя операции дифференцирования и преобразования, получаем
или


При cos cK+l,1≈1,0 формула (24) преобразуется к виду

а при числе членов ряда р≤10 и  - к виду
- к виду

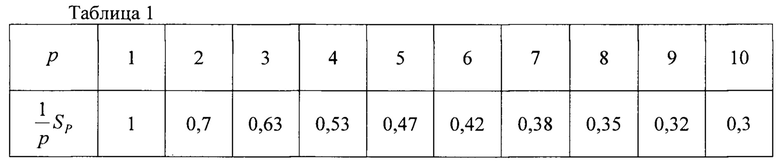
Вычисляя частные суммы SP членов ряда  находим результирующее аналитическое выражение для определения среднеквадратического отклонения (СКО) усредненного значения курсового угла
находим результирующее аналитическое выражение для определения среднеквадратического отклонения (СКО) усредненного значения курсового угла 

где SP - частные суммы членов ряда при  (их величины приведены в табл. 1).
(их величины приведены в табл. 1).
Графики зависимостей относительной СКО измерения курсового угла РИО  от его величины при
от его величины при  =0,1 град., sin с2,1=0,1, S1=1 и S10=0,3 представлены на фиг. 4.
=0,1 град., sin с2,1=0,1, S1=1 и S10=0,3 представлены на фиг. 4.
В предложенном способе значение модуля вектора скорости на основании (16) определено как
Используя вышеизложенную методику, получим СКО значения ошибки вычисления модуля скорости в виде

а его относительное значение

Формула (28) получена в результате подстановки в выражение (27) соотношений (17) и (26).
Графики зависимостей СКО измерения скорости РИО  от величины его курсового угла
от величины его курсового угла  при
при  =0,1 град., sin с2,1=0,1, S1=1 и S10=0,3 представлены на фиг. 5.
=0,1 град., sin с2,1=0,1, S1=1 и S10=0,3 представлены на фиг. 5.
В предложенном способе текущее и экстраполированное значения наклонных дальностей между пассивной РЛС и РИО, находящегося в точках АК, определено соотношением

В соответствии с вышеизложенной методикой среднеквадратическое значение ошибки измерения наклонных дальностей равно

а его относительное значение может быть определено формулой

Графики зависимостей относительной СКО измерения дальности  в функции от величины угла ck,1 при , равных 2 и 6 угловым минутам соответственно, представлены на фиг. 6.
в функции от величины угла ck,1 при , равных 2 и 6 угловым минутам соответственно, представлены на фиг. 6.
В результате вышеизложенных операций получены аналитические выражения, позволяющие оценивать точностные характеристики предложенного способа пассивной однопозиционной угломерно-доплеровской локации. Анализ этих аналитических выражений показал, что в случае высокоточных измерений доплеровских сдвигов частоты излучаемых РИО сигналов, величины относительных СКО вычисления пространственных курсовых углов и скоростей движения РИО определяются точностью измерения их угловых координат, зависят от направления движения РИО и в рабочем секторе наклонных курсовых углов (3-85) угловых градусов, при ошибках измерения угловых координат σk,1<2 угловых минут, не превышают относительных значений  а величины относительных СКО измерения наклонных дальностей РИО - РЛС определяются величиной используемого угла ck,1 и при его изменении в пределах (5-25) градусов не превосходят величин (0,3-1,9)×10-2 при ошибке измерения УК менее 6 угловых минут и (1,0-6,2)×10-3 при ошибке измерения УК менее 2 угловых минут.
а величины относительных СКО измерения наклонных дальностей РИО - РЛС определяются величиной используемого угла ck,1 и при его изменении в пределах (5-25) градусов не превосходят величин (0,3-1,9)×10-2 при ошибке измерения УК менее 6 угловых минут и (1,0-6,2)×10-3 при ошибке измерения УК менее 2 угловых минут.
Предложенный способ локации и реализующая его однопозиционная пассивная РЛС надежно функционируют в условиях приема флюктуирующих сигналов при достаточном отношении сигнал/шум (порядка 12-15 дБ), так как флюктуации влияют лишь на характеристики обнаружения и точность измерения энергетических параметров.
Реализация способа и устройства на его основе не встречает затруднений при современном уровне развития радиотехники и устройств цифровой обработки сигналов. Возможность реализации предложенного способа обеспечивает ему критерий «промышленная применимость».
Использование предложенного способа, по сравнению с прототипом, обеспечивает следующие технические эффекты:
- возможность измерения по единому алгоритму направлений движения, скоростей и траекторий РИО, перемещающихся в пространстве в произвольных направлениях с переменной высотой полета;
- работоспособность способа и устройства при приеме сложных частотно-фазомодулированных сигналов;
- возможность измерения пространственных курсовых углов и скоростей РИО с относительными погрешностями, не превышающими 5,2×10-3, и, как следствие этого, возможность селекции объектов по совокупности параметров «угловые координаты - скорость»;
- возможность измерения наклонных дальностей РИО - РЛС с относительными погрешностями, не более (0,3-1,9)×l0-2, что в 17 раз лучше, чем у прототипа, у которого они составляют (5-35)×10-2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
Изобретение относится к области радиотехники и может использоваться в системах пассивной радиолокации и радиотехнического наблюдения для однопозиционного определения скоростей, координат и траекторий перемещающихся в пространстве радиоизлучающих объектов (РИО). Технический результат - однопозиционное измерение направлений и скоростей движения РИО, перемещающихся в пространстве равномерно и прямолинейно с переменной высотой полета, а также построение траекторий совокупности РИО, движущихся с произвольными курсовыми углами и углами пикирования (кабрирования). Технический результат достигается за счет того, что оценивают величины пространственных курсовых углов γk РИО на наклонных плоскостях 0AlAk, проходящих через участки А1Аk траекторий, где А1, А2, … Аk, … АК - точки на траектории движения РИО, в которых он находится в равноотстоящие моменты времени, и лежащую вне траектории точку наблюдения, вычисляют отношение доплеровских сдвигов частот для получения уравнения относительно наклонного курсового угла γ1, решая которое определяют текущие значения курсовых углов, величину модуля скорости РИО, длину пути, пройденного объектом между точками траектории А1 и Ak, и значение наклонной дальности в случае нахождения объекта в точках Ak траектории, а также значения модуля скорости радиоизлучающего объекта при нахождении его в точках Аk. Затем осуществляют построение траекторий объектов, используя измеренные и рассчитанные значения их угловых координат, наклонных дальностей, курсовых углов и скоростей перемещения. 1 табл., 6 ил.
Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов, при котором применяют для приема радиосигналов цифровую антенную решетку или антенную решетку с цифровой обработкой сигналов, формируют в пространстве, используя на раскрыве антенной решетки весовую функцию Хэмминга, моноимпульсную группу лучей с общим фазовым центром и пеленгационные характеристики с рабочими зонами ΔβПХ по азимуту и ΔεПХ по углу места, линейные на всей ширине моноимпульсной группы лучей за счет специально выбранных углов смещения лучей βсм и εсм, разбивают заданную область обзора пространства на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равносигнальное направление моноимпульсной группы лучей в центры этих участков, осуществляют обзор упомянутой области, принимают сигналы радиоизлучающих объектов в течение интервала наблюдения на каждом участке разбиения в заданном диапазоне частот, при появлении упомянутых сигналов констатируют обнаружение всей совокупности 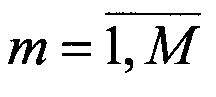 объектов в упомянутой области обзора и определяют параметры их сигналов - ширину и среднюю частоту спектра, а также вид модуляции, описывают пространственное положение радиоизлучающих объектов, перемещающихся в пространстве равномерно и прямолинейно по траекториям с произвольными углами пикирования (кабрирования), текущими значениями угловых координат (азимута βТ и угла места εТ), векторов наклонных дальностей DT, абсолютных значений векторов скорости V и величин курсовых углов γk между векторами скоростей и наклонных дальностей, измеряют и запоминают для каждого из обнаруженных объектов значения отсчетов βm, εm угловых координат m-го объекта, вычисляемых относительно равносигнальных направлений, как
объектов в упомянутой области обзора и определяют параметры их сигналов - ширину и среднюю частоту спектра, а также вид модуляции, описывают пространственное положение радиоизлучающих объектов, перемещающихся в пространстве равномерно и прямолинейно по траекториям с произвольными углами пикирования (кабрирования), текущими значениями угловых координат (азимута βТ и угла места εТ), векторов наклонных дальностей DT, абсолютных значений векторов скорости V и величин курсовых углов γk между векторами скоростей и наклонных дальностей, измеряют и запоминают для каждого из обнаруженных объектов значения отсчетов βm, εm угловых координат m-го объекта, вычисляемых относительно равносигнальных направлений, как
βm=βPCH +Δβm, εm=εРСН+Δεm,
где
 и
и  - сигналы угловых рассогласований с выходов угловых дискриминаторов для m-го объекта;
- сигналы угловых рассогласований с выходов угловых дискриминаторов для m-го объекта;
 и
и  - значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях смещений βсм и εсм лучей от равносигнальных направлений, селектируют, используя данные об измеренных параметрах сигналов и угловых координатах, N объектов (из совокупности М), избранных для автосопровождения, сглаживают значения измеренных угловых координат каждого объекта с помощью фильтров автосопровождения, представляя их в виде усредненных зависимостей
- значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях смещений βсм и εсм лучей от равносигнальных направлений, селектируют, используя данные об измеренных параметрах сигналов и угловых координатах, N объектов (из совокупности М), избранных для автосопровождения, сглаживают значения измеренных угловых координат каждого объекта с помощью фильтров автосопровождения, представляя их в виде усредненных зависимостей 
 где
где  - номер наблюдаемого объекта, формируют для приема сигналов избранных объектов N одиночных лучей, наведение которых по угловым координатам осуществляется управляющими сигналами, сформированными на основании данных об угловых координатах сопровождаемых радиоизлучающих объектов, параллельно принимают по N лучам и обрабатывают сигналы радиоизлучающих объектов, восстанавливают, зная вид модуляции, несущие частоты ƒHn принятых сигналов, измеряют и запоминают значения их отсчетов, сглаживают и представляют результаты в виде усредненных зависимостей
- номер наблюдаемого объекта, формируют для приема сигналов избранных объектов N одиночных лучей, наведение которых по угловым координатам осуществляется управляющими сигналами, сформированными на основании данных об угловых координатах сопровождаемых радиоизлучающих объектов, параллельно принимают по N лучам и обрабатывают сигналы радиоизлучающих объектов, восстанавливают, зная вид модуляции, несущие частоты ƒHn принятых сигналов, измеряют и запоминают значения их отсчетов, сглаживают и представляют результаты в виде усредненных зависимостей  интерполируют усредненные угловые зависимости
интерполируют усредненные угловые зависимости  и
и  а также усредненную зависимость
а также усредненную зависимость  получая непрерывные функции β(t), ε(t) и ƒH(t), причем здесь и далее индекс n наблюдаемого объекта не указывается - расчет проводят для каждого из N объектов,
получая непрерывные функции β(t), ε(t) и ƒH(t), причем здесь и далее индекс n наблюдаемого объекта не указывается - расчет проводят для каждого из N объектов,
отличающийся тем, что используют для оценки параметров движения объектов в пространстве наклонные плоскости 0A1Ak, образованные лучами OAk, участками A1Ak траекторий, где А1, А2, … Ak, … АК - точки на траектории движения радиоизлучающего объекта, в которых он находится в равноотстоящие моменты времени t1, t2, … tK, и лежащую вне траектории точку наблюдения, находящуюся в начале системы координат 0xyz, при этом величины модулей векторов наклонных дальностей DT совпадают с длиной лучей OAk, векторы скоростей V направлены вдоль участков A1Ak траекторий, углы между лучами OAk и отрезками A1Ak являются курсовыми углами γk, а в качестве аналогов угловых координат объектов используют углы ck,1 между векторами наклонных дальностей 0А1 и текущими значениями наклонных дальностей 0Ak, вычисляют величины углов ck,1, каждый из которых является гипотенузой сферического прямоугольного треугольника с катетами Δβk,1, Δεk,1 и равен угловому размеру проекции на небесную сферу пути объекта за время Δtk,l=tk-t1, в соответствии с формулой

где  - номера точек А1, А2, … Ak на траектории объекта в моменты времени
- номера точек А1, А2, … Ak на траектории объекта в моменты времени
t=t2, t3, … tk;
Δβk,1=(βk-β1)⋅cos[min(εk, ε1)];
Δεk,1=εk-ε1;
βk=β(tk);
εk=ε(tk)
извлекают из зависимости ƒH(t) в моменты времени t1, t2, … tk значения ƒHk, вследствие эффекта Доплера равные

где ƒH0 - значение несущей частоты сигнала наблюдаемого объекта в состоянии покоя;
ƒДk - доплеровский сдвиг несущей частоты;
λ - длина волны сигнала объекта,
и определяют их приращения на интервалах Δt2,1 и Δt3,1, равные


вычисляют величину отношения приращений несущей, получая уравнение относительно курсового угла γ1, решая которое определяют его предварительное значение
где
и предварительное значение модуля вектора скорости объекта

где с=299792458 м/с - скорость распространения электромагнитных волн,
рассчитывают на основе полученных оценок предварительное значение несущей частоты сигнала объекта, условно находящегося в покое, как
вычисляют уточненное значение ƒH0 несущей частоты сигнала радиоизлучающего объекта, находящегося в покое, как частоту колебаний цифрового генератора, управляемого сигналом автоподстройки, формируемым в результате сравнения приращений частот Δƒk,k-1=ƒk-ƒk-1 и ΔƒДk,k-1=(ƒk-ƒ0П)-(ƒk-1-ƒ0П), определяют в моменты времени tk и запоминают совместно со значениями углов ck+1,k доплеровские сдвиги частот сигналов ƒДk=ƒk-ƒH0 радиоизлучающего объекта, извлекают из памяти значения доплеровских сдвигов частоты ƒД1 и ƒД2, а также угла с2,1, вычисляют отношение доплеровских сдвигов
и получают уравнение относительно наклонного курсового угла γ1, решая которое определяют значение
повторяют расчеты значения ctg γ1 для Р моментов времени tk и определяют значения
где k=2, 3, …, Р, …, K,
вычисляют усредненное значение величины
а также усредненное значение пространственного курсового угла
и текущие значения курсовых углов  определяют, используя найденное усредненное значение курсового угла
определяют, используя найденное усредненное значение курсового угла  величину модуля скорости радиоизлучающего объекта как
величину модуля скорости радиоизлучающего объекта как
и длину пути, пройденного объектом между точками траектории А1 и Ak
где k=2, 3, …, K,
определяют пространственное местоположение объекта точками пересечения на наклонных плоскостях 0A1Ak лучей, исходящих из начала координат под углами ck,1 относительно луча 0А1, и окружностей с центрами  хордами которых являются отрезки пути Sk,1, а радиусы равны
хордами которых являются отрезки пути Sk,1, а радиусы равны
фиксируют центры  упомянутых окружностей как точки на концах лучей длиной Rk, проведенных из начала координат под углами ψk относительно луча 0A1 и равных
упомянутых окружностей как точки на концах лучей длиной Rk, проведенных из начала координат под углами ψk относительно луча 0A1 и равных

вычисляют значение наклонной дальности в случае нахождения объекта в точке А1
значения наклонных дальностей при нахождении объекта в точках Ak траектории
а также значения модуля скорости радиоизлучающего объекта при нахождении его в точках Ak траектории
осуществляют построение траекторий объектов, используя измеренные и рассчитанные значения их угловых координат, наклонных дальностей, курсовых углов и скоростей перемещения, определяют величину разности |V|k-|V|1=Δ|V|k,1 и производят сравнение полученной величины с пороговым значением
в случае, когда Δ|V|k,1>|V|n, констатируют начало маневра объекта, и для дальнейшего построения его траектории на следующем участке ее кусочно-линейной аппроксимации повторяют расчеты курсовых углов, скоростей и дальностей по вышеприведенным формулам.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ИЗМЕРЕНИЯ БОРТОВОЙ ПАССИВНОЙ СИСТЕМОЙ НАБЛЮДЕНИЯ ПЕРЕМЕЩЕНИЙ ДВИЖУЩЕГОСЯ ОБЪЕКТА И ДАЛЬНОСТИ ДО НЕГО | 2008 |
|
RU2381523C2 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Горизонтальная камерная печь для получения газа и кокса | 1926 |
|
SU17185A1 |
| JP 2012118076 A, 21.06.2012 | |||
| US 5220328 A, 15.06.1993 | |||
| JP 4734378 B2, 27.07.2011. | |||

