Изобретение относится к электротехнике, в частности к многокоординатным шаговым электродвигателям, и может быть использовано в автоматизированных технологических установках.
Наиболее близким из известных модулей шагового электродвигателя по технической сущности является двигатель, содержащий магнитомягкое ярмо в качестве опорной поверхности, ротор в форме тела вращения и охватывающий его статор с расточкой в форме усеченного тела вращения с размещенными в нем полюсными наконечниками с обмотками на них.
Недостаток этого двигателя - ограниченные функциональные возможности, связанные с перемещением только по плоскости и по одной координате, а также сложностью конструкции ротора, несущего многофазную обмотку и скользящие контакты.
Целью изобретения является расширение функциональных возможностей путем обеспечения точных двухкоординатных перемещений и упрощения конструкции.
Цель достигается тем, что в известном модуле шагового электродвигателя, содержащем магнитомягкое ярмо в качестве опорной поверхности, ротор в форме тела вращения и охватывающий его статор с расточкой в форме усеченного тела вращения с размещенными в нем полюсными наконечниками с обмотками управления на них, ротор выполнен в виде сферического двухполюсного магнита, расточка статора выполнена сферической, а полюсные наконечники в нем расположены по трем взаимно перпендикулярным осям, пересекающимся в центре сферического ротора.
Кроме того, статор жестко связан по крайней мере с двумя статорами идентичных модулей, шаровые роторы которых расположены на общем ярме, образующем опорную поверхность, причем одноименные оси обмоток всех модулей параллельны.
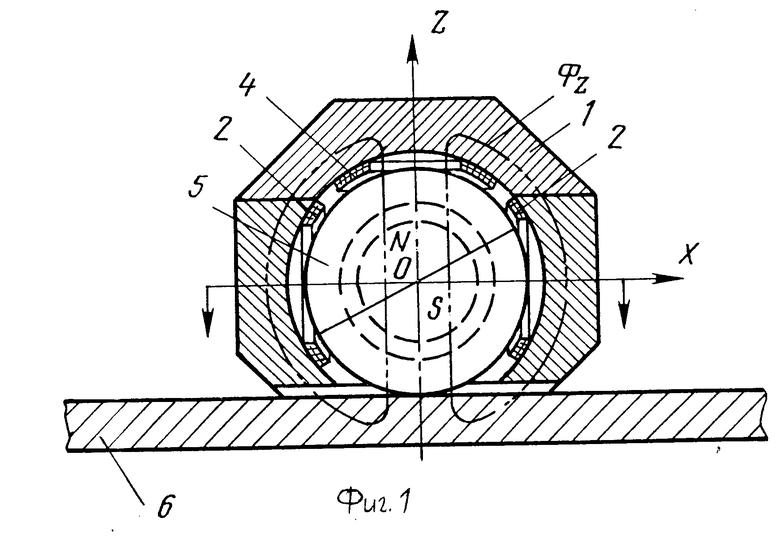
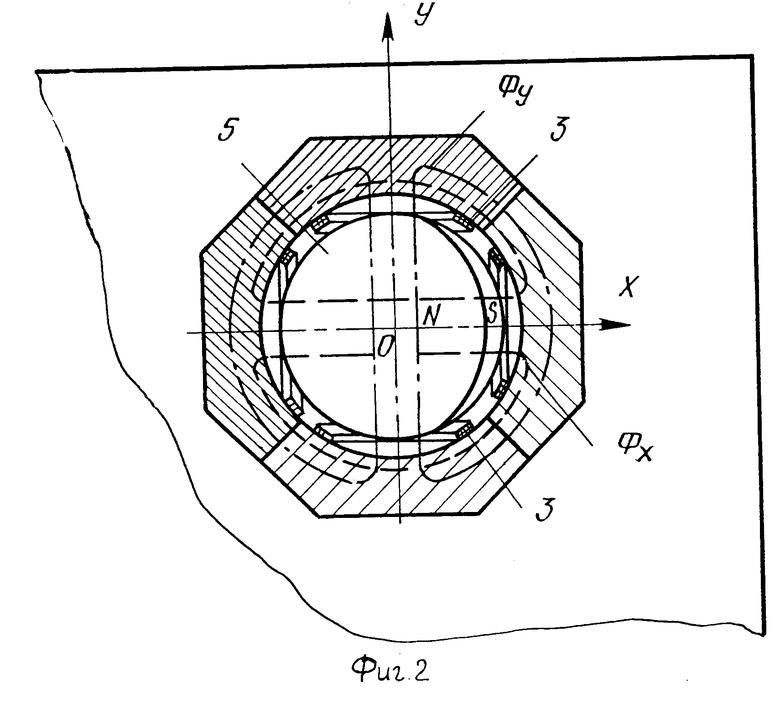
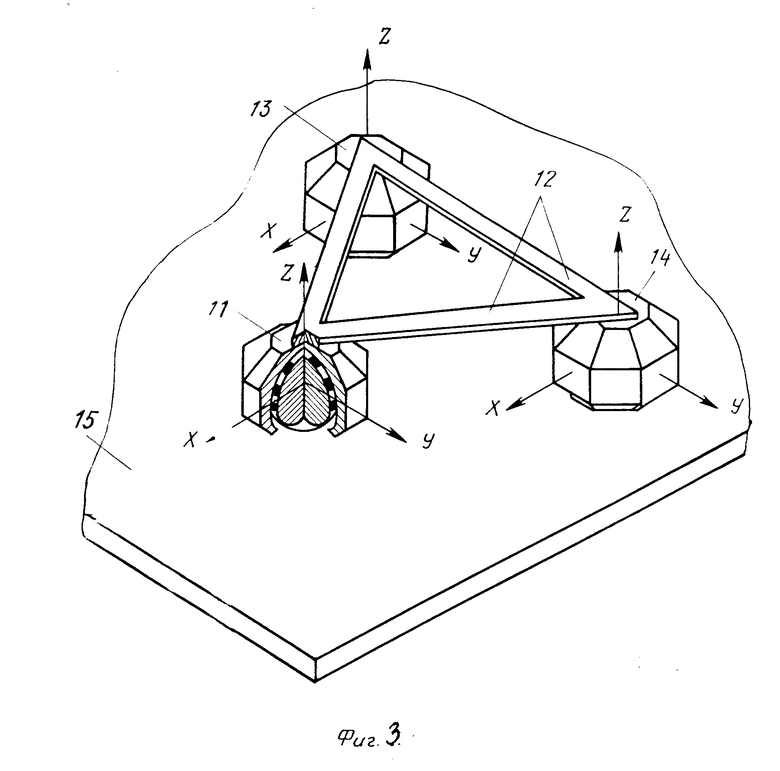
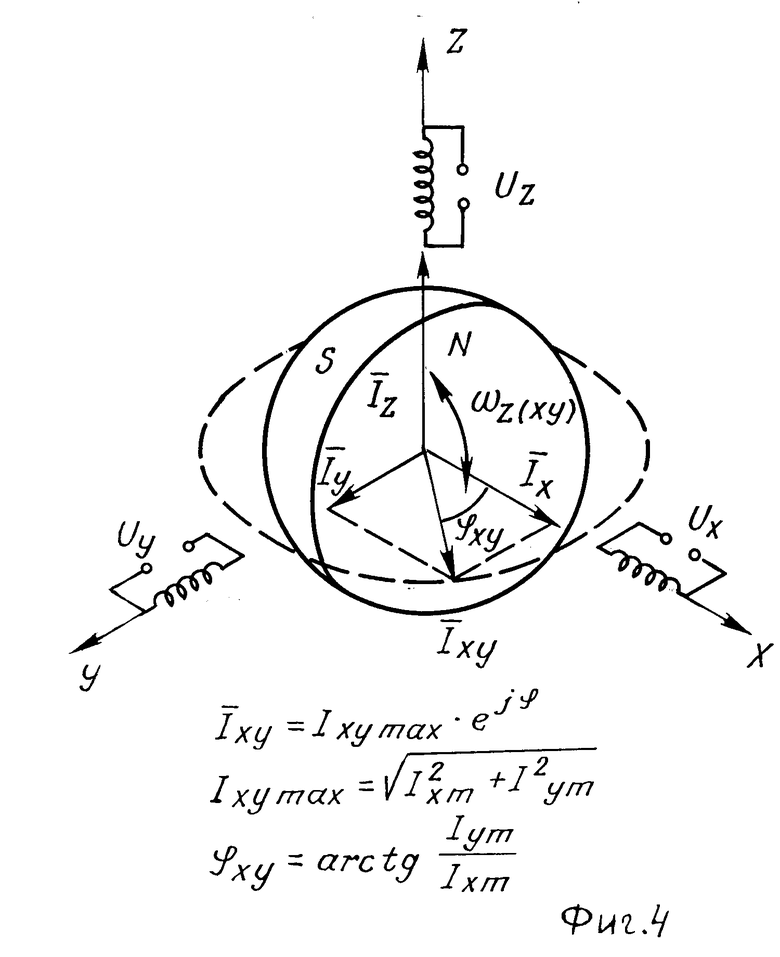
На фиг. 1 и 2 изображен модуль шагового электродвигателя; на фиг. 3 - модуль, статор которого жестко связан с двумя статорами идентичных модулей; на фиг. 4 - схема создания и взаимодействия магнитных полей при работе двигателя.
Модуль шагового электродвигателя содержит магнитомягкий корпус статора 1 с расточкой в форме усеченной сферы, систему фазных обмоток 2 (по оси X), систему обмоток 3 (по оси Y) и обмотку 4 (по оси Z). Оси X, Y, и Z взаимно перпендикулярны и их точка пересечения расположена в центре шарового ротора 5, представляющего собой двухполюсный магнит.
Со стороны усеченной части сферической расточки статора к шаровому ротору примыкает магнитомягкое ярмо 6, поверхность которого представляет опорную поверхность модуля. Шаровой ротор отделен от статора аэростатической опорой. Пути замыкания потоков обмоток 2, обмоток 3 и обмотки 4 показаны пунктиром соответственно ΦX,ΦY и ΦZ .
На фиг. 3 изображен модуль 11, статор которого жестко соединен с рамой 12, к которой жестко прикреплены статоры идентичных модулей 13 и 14. Все модули опираются на единую опорную поверхность магнитомягкого ярма 15, при этом оси X, Y и Z всех модулей параллельны.
Модуль работает следующим образом.
Для создания результирующего дискретно вращающегося магнитного поля статора (см. фиг. 4) на обмотки статора подается система напряжений
UX = AX sin ω t;
UY = AY sin ω t;
UZ = UZm cos ω t, где AX = Uxm ˙ sin Ω t, Ay = Uym cosΩ t и обычно
Uxm = Uym = Uzm.
Результирующий вектор н. с. пульсирующего поля обмоток статора X и Y, перемещающийся в горизонтальной (экваториальной) плоскости с частотой Ω, определяется по величине и положению, как
Ixy = Ixy max ˙ ˙ejϕxy, где
Ixymax= 
ϕxy= arctg Ixm и Iym - амплитуды н.с. фазных обмоток X и Y.
Ixm и Iym - амплитуды н.с. фазных обмоток X и Y.
Взаимодействие н. с. Ixy пульсирующего поля обмоток Y и Y с н.с. Iz = Izm ˙ cosωt пульсирующего поля обмотки Z создает вращающееся поле статора в вертикальной (меридиональной) плоскости, положение (широта) которой определяется углом ϕxy, смена положений (широты) частотой Ω, скорость вращения поля частотой ω. Двухполюсный магнит (ротор) синхронно с результирующим полем статора осуществляет вращение, а значит и качение по опорной поверхности по заданной изменениями ϕxy траекториям.
Дискретное вращение поля осуществляется дискретным изменением токов Iz и Ixy с возможностью прекращения изменения токов в фазах, как это и осуществляется в современных шаговых электроприводах.
Отсутствие проскальзывания при качении ротора и высокая точность перемещения обеспечиваются магнитным притяжением магнитного ротора к магнитомягкому ярму.
Задавая необходимые траектории движения каждому модулю (фиг. 3), получают движение системы жесткосоединенных модулей по трем координатам: вдоль осей X, Y и вокруг оси Z.
В любом варианте состава модулей движение осуществляется как по плоской, так и по криволинейной поверхности.
Таким образом, функциональные возможности существенно расширяются, обеспечивая точное перемещение при движении по двум и трем координатам по поверхности, а также упрощается конструкция ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2030079C1 |
| Редукторный синхронный или шаговый электродвигатель | 1959 |
|
SU134772A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2030080C1 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476640A1 |
| ОДНОФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1970 |
|
SU258435A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Электродвигатель с качающимся ротором | 1979 |
|
SU828334A1 |
| Шаговый электродвигатель | 1982 |
|
SU1130973A1 |
| Способ измерения угловой моментной характеристики шагового электродвигателя | 1984 |
|
SU1191848A1 |
| Шаговый нереверсивный электродвигатель | 1960 |
|
SU135949A1 |
Использование: в автоматизированных технологических установках. Сущность изобретения: модуль содержит магнитомягкий корпус статора с расточкой в форме усеченной сферы, систему фазных обмоток, оси X, Y, Z которых взаимно перпендикулярны и их точка пересечения находится в центре шарового ротора, представляющего собой двухполюсный магнит и лежащего на магнитомягком ярме. Ротор синхронно с результирующим полем статора совершает вращение, а значит, и качение по опорной поверхности по заданной траектории. 1 з.п. ф-лы, 4 ил.
| Синхронный линейный электродвигатель Штраснера | 1985 |
|
SU1359864A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
