Изобретение относится к станкостроению и предназначено для использования в прецизионных станках с целью исключения вибрации и искажения траектории движения подвижного органа.
В настоящее время при создании предварительного натяга обычно применяют клинья, пружины, мерные планки, эксцентрики и т.д.
Известными устройствами очень сложно обеспечить оптимальный равномерно направленный натяг. Вместе с тем при применении этих устройств могут возникнуть перекосы, деформация подвижных органов, что приводит к ухудшению плавности и легкости перемещения последних. Кроме того, известные устройства для предварительного натяга способны решать только одну задачу: предотвращение отрыва подвижных органов от направляющих, возникающих только при аварийных ситуациях. Однако при перемещении подвижного органа по направляющим при работе станка возникают вибрации и деформация подвижного органа, которые приводят к смещению траектории движения подвижного органа, а в результате к снижению точности и чистоты обработки.
Предотвращение отрыва подвижного органа от направляющих, устранение возникновения вибрации, деформаций и смещение траектории движения подвижного органа решается в известном устройстве. Известное устройство для предварительного натяга подвижного органа, перемещающегося по направляющим станка, содержит подвижные ролики, упругий элемент, выполненный в виде ленты, прикрепленной свободными концами к неподвижному органу и контактирующей с подвижными и дополнительными направляющими роликами, установленными на осях, закрепленных на подвижном органе.
Известное устройство создает возможность регулирования величины предварительного натяга подвижного органа станка, т.е. обеспечивает создание требуемой и постоянной силы предварительного натяга на всем пути движения подвижного органа.
К недостаткам известного устройства можно отнести: - в устройстве отсутствует возможность самоустанавливаться, т.е. требуется высокая точность установки роликов, иначе будут возникать силы, уводящие узел с траектории движения.
Известное устройство может быть использовано как обратная планка без точности регулировки по силе, так как планка-винт - не имеет податливости вдоль винта и, следовательно, требует высокой точности изготовления направляющих по толщине, в противном случае неравномерность по толщине дает изменение зазора или натяга соответственно с изменением силы трения, что сказывается на плавности перемещения узла, так как создает эффект заклинивания.
Устройство, принятое за прототип, содержит корпус, жестко прикрепленный к подвижному органу через проставку, за счет изменения толщины проставки регулируется величина натяга. Исключение вибрации и исключение траектории движения подвижного органа осуществляется за счет того, что в корпусе на оси с осевым зазором установлен сферический ролик, контактирующий с V-образным пазом планки, жестко закрепленной на неподвижной части станка параллельно траектории движения подвижного органа. Постоянный же прижим ролика к V-образному пазу осуществляется за счет утонченной части корпуса, которая является упругим элементом.
К недостаткам известного устройства можно отнести:
невозможность регулирования величины натяга без демонтажа устройства;
невозможность самоустановки в плоскости оси ролика;
затрудненное перемещение ролика вдоль оси, обусловленное возникновением момента в результате приложения силы с большим плечом относительно заделки ролика.
Эти недостатки обусловлены тем, что точность геометрических параметров дополнительной направляющей и точность установки ее практически никогда не будет совпадать с направлением перемещения подвижного органа по основным направлениям. И соответственно эти погрешности установки, непараллельность, непрямолинейность, извернутость будут уводить подвижный орган с заданной траектории в любую сторону.
Целью настоящего изобретения является устранение вышеуказанных недостатков и создание устройства для предварительного натяга, исключающего вибрацию и искажение траектории движения подвижного органа и способного самоустанавливаться.
Указанная цель достигается за счет того, что в известном устройстве для предварительного натяга, содержащем корпус, сферические ролики, упругие элементы и дополнительную направляющую, ролики установлены в корпусе с возможностью поворота вокруг вертикальной оси, причем корпус установлен с возможностью поворота вокруг горизонтальной плоскости оси, размещенной в коромысле, на котором установлены упругие элементы, например, тарельчатые пружины, контактирующие через планку и тела качения с регулировочными элементами, установленными в кронштейне, закрепленном на подвижном органе.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается от известного тем, что ролики установлены в корпусе с возможностью поворота вокруг вертикальной оси, причем корпус установлен с возможностью поворота вокруг горизонтальной оси, размещенной в коромысле, на котором установлены упругие элементы, например, тарельчатые пружины, контактирующие через планку и тела качения с регулировочными элементами, установленными в кронштейне, закрепленном на подвижном органе.
Таким образом, предлагаемое изобретение соответствует критерию изобретения "новизна".
Сравнение заявляемого изобретения не только с прототипом, но и с другими техническими решениями в данной области, позволили выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "существенные отличия".
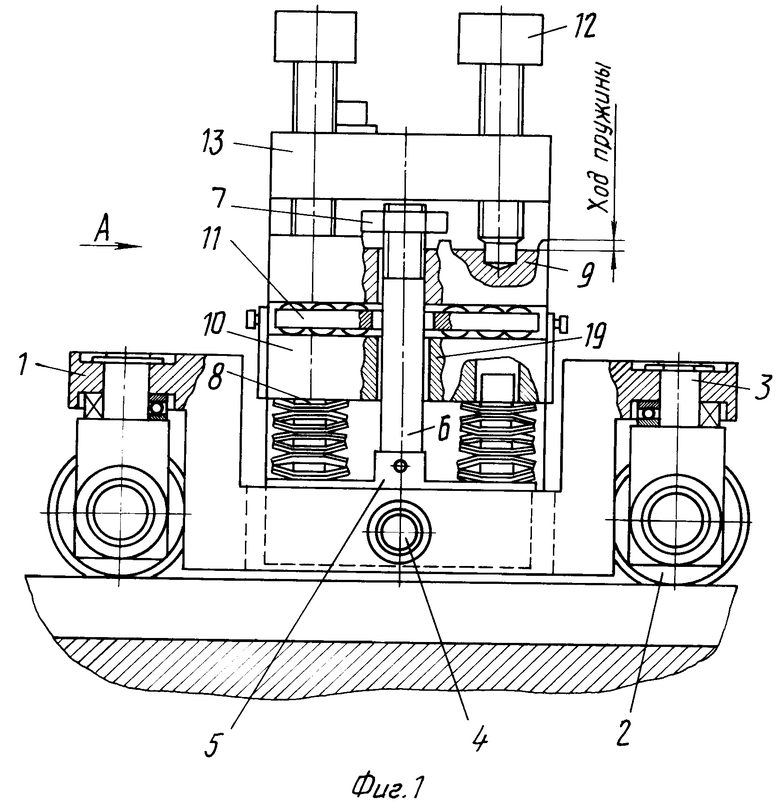
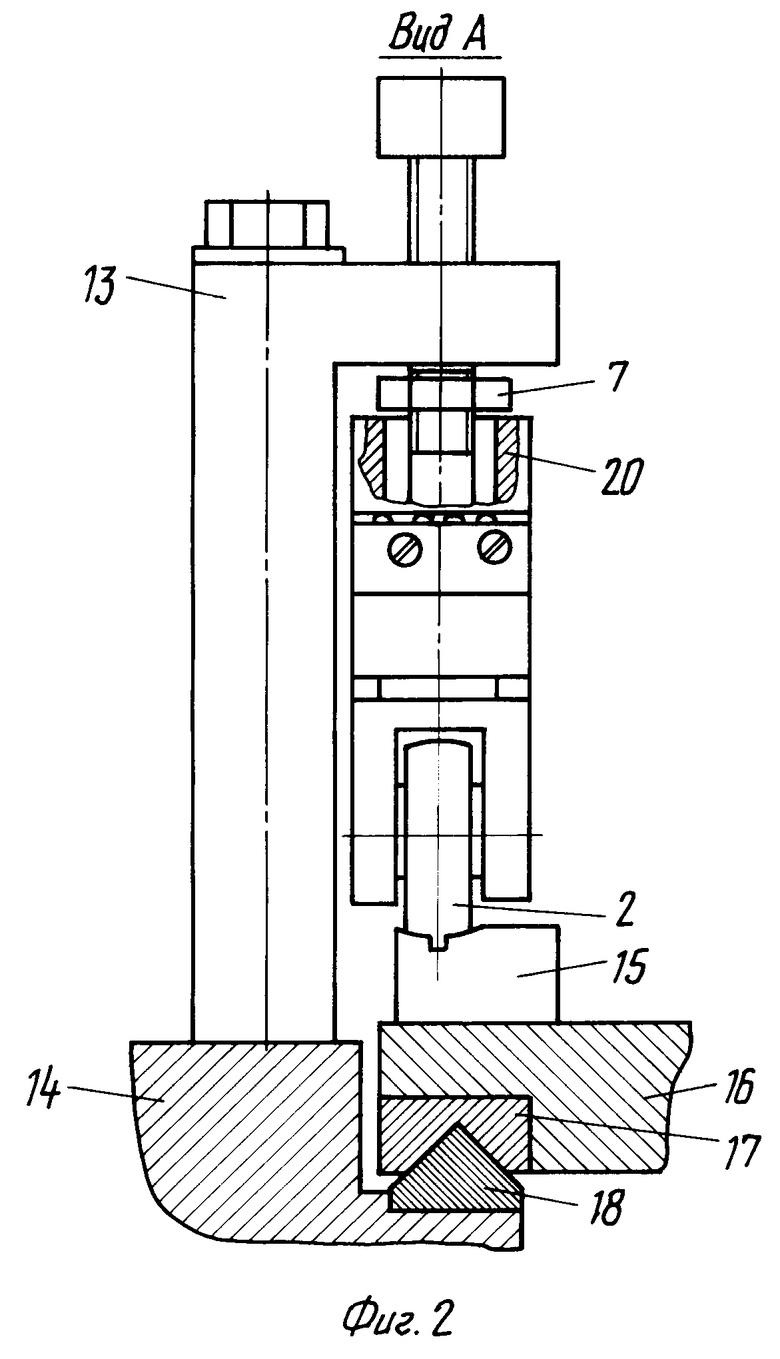
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - вид по стрелке А на фиг. 1.
Устройство для предварительного натяга содержит корпус 1, перемещающийся на роликах 2, которые имеют возможность поворачиваться вокруг осей 3, находящихся в плоскости вращения роликов 2 перпендикулярно направлению движения роликов 2. В корпус 1 на равном расстоянии от роликов 2 установлена ось 4, на которой расположено с возможностью поворота коромысло 5 с пальцем 6, установленным перпендикулярно оси 4. На свободном конце пальца 6 навернута гайка 7. На коромысле 5 симметрично относительно оси 4 расположены упругие элементы 8, например, пакет тарельчатых пружин, контактирующие через планки 9 и 10, расположенные на пальце 6, и через независимо самоустанавливающиеся элементы 11, например, шарики в сепараторе, с регулировочными элементами 12 (например, винтами со сферической упорной поверхностью, установленными в кронштейне 13, закрепленном на подвижном органе 14. Ролики 2 перемещаются на дополнительной направляющей планке 15, установленной на неподвижном органе 16.
На неподвижном органе 16 имеются направляющие 17, по которым на своих направляющих 18 перемещается подвижный орган 14. Направляющая планка 15 может быть установлена параллельно направляющим 17 на неподвижном органе с естественной погрешностью, т.е. отклонением от параллельности, и сама дополнительная направляющая планка 15 обязательно будет иметь геометрические погрешности по прямолинейности, извернутости и параллельности V-образной поверхности, по которой перемещаются ролики 2.
Устройство для предварительного натяга работает следующим образом.
Собранное устройство без кронштейна 13 и регулировочных элементов 12 вне станка устанавливается на нагрузочный прибор и сжимается до заданной силы нагружения. В этом состоянии гайка 7 закручивается до контакта с планкой 9, но, не сдвигая ее. Устройство снимается с прибора и устанавливается на станок роликами 2 на дополнительную направляющую планку 15 неподвижного органа 16. Регулировочные элементы 12 подвижного органа 14 вводятся в контакт с пластиной 9. Затем гайка 7 отворачивается и подвижный орган 14 прижимается в неподвижному 16 с заданной силой, установленной на нагрузочном приборе.
Подвижный орган 14, перемещаясь по направляющим 17 неподвижного органа 13, заставляет перемещать все устройство по дополнительной направляющей планке 15 через регулировочные элементы 12 и планку 9, толкают палец 6 и заставляют двигаться устройство по дополнительной направляющей планке 15 неподвижного органа 16 станка. При перемещении устройства по дополнительной направляющей планке 15 ролики 2 катятся по траектории, указанной планкой 15, при этом, самоустанавливаясь и разворачиваясь вокруг оси 3, перпендикулярной направлению перемещения. Вместе с роликами 2 разворачивается и корпус 1, занимая оптимальное положение между роликами 2, т.е. смещаясь в сторону от теоретически заданного направления перемещения подвижного органа 14. Если ролики 2 установятся таким образом, что один из них окажется во впадине планки 15, а другой на вершине, то корпус 1 развернется вокруг оси 4, а коромысло 5 останется в первоначальном положении, а смещение оси 4 компенсируется упругим элементом 8.
Смещаясь в сторону от теоретически заданного направления, корпус 1 заставляет палец 6, который проходит круглое отверстие 19 в планке 10, смещаться вдоль отверстия 20, выполненного в виде паза, расположенного перпендикулярно длине планки 9, а независимый самоустанавливающийся элемент 11, например, сепаратор с шариками, смещается по своей траектории, давая возможность планке 9 перемещаться независимо от планки 10 (так как отверстие в планке 9 под палец 6 значительно больше диаметра пальца 6), а следовательно, и весь неподвижный орган 14 станка перемещается независимо от движения устройства.
Таким образом, в устройстве для предварительного натяга подвижного органа, содержащего корпус, сферические ролики, упругие элементы и дополнительную направляющую, установление роликов в корпусе с возможностью поворота вокруг вертикальной оси, а установление корпуса с возможностью поворота вокруг горизонтальной оси, размещенной в коромысле, на котором установлены упругие элементы, например, тарельчатые пружины, контактирующие через планку и тела качения с регулировочными элементами, установленными в кронштейне, закрепленном не подвижном органе, позволяет осуществлять постоянный поджим подвижного органа через дополнительную планку к неподвижному органу и освободить подвижный орган от влияния возмущающих сил, возникающих от погрешностей дополнительной направляющей планки, т.е. осуществить постоянное самоустановление подвижного органа и тем самым максимально исключить вибрации и искажение траектории движения подвижного органа станка. В результате повышается точность и чистота обработки на прецизионных станках.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПИНДЕЛЬНАЯ БАБКА | 1992 |
|
RU2041772C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО УПРАВЛЕНИЯ ПРИВОДОМ | 1991 |
|
RU2024179C1 |
| ТОРЦЕВОЕ СОЕДИНЕНИЕ ВАЛОВ | 1988 |
|
RU2010111C1 |
| СПОСОБ СБОРКИ ДВУХРЯДНЫХ СФЕРИЧЕСКИХ ШАРИКОПОДШИПНИКОВ С ЛЕПЕСТКОВЫМИ СЕПАРАТОРАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2097615C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОЛЕЦ ПОДШИПНИКОВ | 1994 |
|
RU2069140C1 |
| МАШИНА ДЛЯ МОЙКИ ИЗДЕЛИЙ | 1993 |
|
RU2060843C1 |
| СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПРЯМОУГОЛЬНЫХ ПЛАСТМАССОВЫХ ИЗДЕЛИЙ | 1992 |
|
RU2015896C1 |
| РАЗМАТЫВАТЕЛЬ РУЛОНОВ ЯЩИЧНОГО ТИПА | 1997 |
|
RU2131316C1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| СТРИГУЩАЯ ГОЛОВКА ЭЛЕКТРОБРИТВЫ | 1995 |
|
RU2103158C1 |
Изобретение относится к станкостроению и преднадназначено для использования в прецизионных станках с целью исключения искажения траектории движения подвижного органа. Устройство для предварительного натяга подвижного органа, содержащее корпус, сферические ролики, упругие элементы и дополнительную направляющую, снабжено связанным с корпусом коромыслом с закрепленной в нем вертикальной осью и пружинами, кронштейном, а также планками и телами качения, размещенными на вертикальной оси с возможностью взаимодействия с пружинами коромысла. 2 ил.
УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНОГО НАТЯГА ПОДВИЖНОГО ОРГАНА, содержащее связанный с рабочим органом станка корпус с установленными в нем сферическими роликами и дополнительную направляющую, отличающееся тем, что оно снабжено связанным с корпусом посредством горизонтальной оси коромыслом с закрепленной в нем вертикальной осью и упругими элементами, закрепленным на рабочем органе кронштейном с регулировочными элементами, а также планками и телами качения, при этом планки и тела качения размещены на вертикальной оси с возможностью взаимодействия с упругими элементами посредством регулировочных элементов кронштейна.
| Устройство для предварительного натяга | 1971 |
|
SU601116A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
