Изобретение относится к машиностроительной промышленности, в частности к манипуляторам, предназначенным для выполнения вспомогательных операций, связанных с изменением положения деталей, сборочных операций.
Известны двурукие манипуляторы, а также портальные автоматические манипуляторы "Пирин", предназначенные для установки - снятия деталей типа тел вращения при обслуживании металлорежущих станков в условиях массового или крупносерийного производства. Одна из базовых моделей портального манипулятора "Пирин" тип Б. На сварной балке коробчатой формы установлены плоский и призматический направляющие рельсы. Сбоку на плоском рельсе нарезана зубчатая рейка, зацепляющаяся с приводом перемещения каретки. На основании каретки расположены опорные ролики, плиты для крепления рук, гидроаккумулятор, гидродвигатель привода перемещения каретки по монорельсу, кронштейн крепления кабельной цепи. Плиту устанавливают на шарнире и закрепляют планками. Оси роликов выполнены с эксцентриситетом, что позволяет менять угловое положение каретки относительно монорельса, обеспечивая контакт роликов с направляющими. Механические руки имеют два конструктивных исполнения: с механизмом ротации захватного устройства и без него. Привод продольного перемещения рук, ротации захватного устройства и движения зажима - от гидроцилиндров.
Один из недостатков этих промышленных роботов - невозможность манипулирования деталями в ограниченных пространствах или если проход к станку ограничен в пространстве.
Цель изобретения - расширение технологических возможностей.
Поставленная цель достигается тем, что на звенья ведущей руки манипулятора с помощью корпусов крепятся ведомые руки, имеющие звенья, шарнирно соединенные приводы поступательного перемещения и рабочие органы.
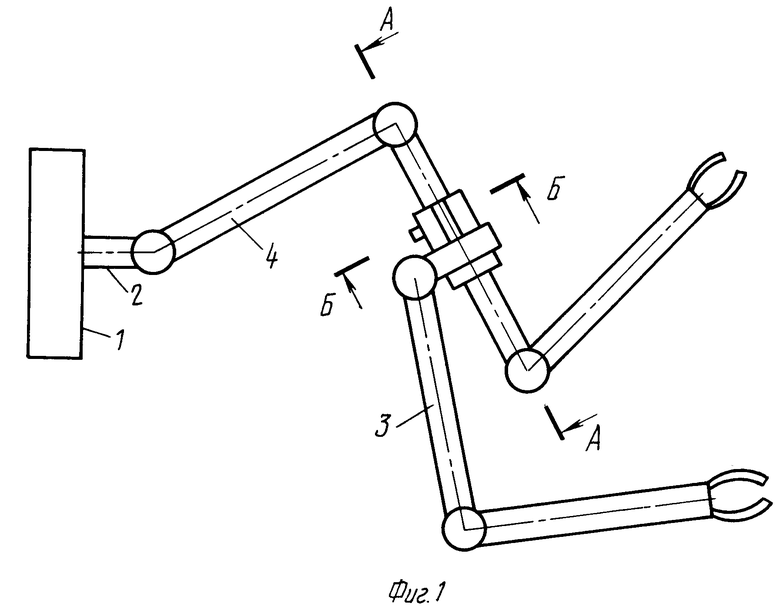
На фиг. 1 изображен манипулятор, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - разрез Б-Б на фиг.1.
Манипулятор содержит основание 1, ведущую 2 и ведомую 3 руки, каждая из которых имеет рабочий орган, шарнирно соединенные звенья со своим приводом. Звено 4 ведущей руки выполнено в виде зубчатой рейки, по которой перемещается цилиндрический корпус 5 ведомой руки 3. Корпус 5 перемещается с помощью привода поступательного перемещения электродвигателя 6 и шестерни 7. На корпусе 5 стоит колесо 8. От продольного и поперечного смещений колесо 8 удерживается подшипниками 9, 10. Подшипники 10 стоят между стенкой колеса 8 и опорной площадкой 11. На колесе 8 закреплена шестерня 12 с внутренней резьбой. Вращается колесо 8 электродвигателем 13 с шестерней 14, входящей в зацепление с шестерней 12. На колесе 8 закреплены звенья 15 ведомой руки 3 со своими шарнирными соединениями, приводами и рабочим органом.
Манипулятор работает следующим образом.
Рука ведущего манипулятора 2 приводится в определенное место блоком управления. Блок управления подает команду на включение двигателю 6 ведомой руки 3. Электродвигатель, вращая шестерню 7, поднимает корпус 5. Далее включается электродвигатель 13, который вращает шестерню 12. Теперь блок управления приводит в определенное положение приводы звеньев 15 ведомой руки 3. Манипулятор готов к работе. По окончании работы блок управления возвращает манипулятор в исходное положение.
Манипулятор работает в узких местах, заменяя два манипулятора и больше. Может выполнять сборочные операции внутри корпусов машин и другого оборудования. Например, установка небольшой детали через отверстие в корпусе, через которое проходит манипулятор. Одна рука приносит деталь, вторая - болт, третья - гайку, и манипулятор устанавливает их внутри корпуса. Можно вводить в отверстие и большее число рук, выполняя более сложную работу (это же количество рук прототипа в отверстие не проходит).
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1994 |
|
RU2073602C1 |
| ДВУРУКИЙ МАНИПУЛЯТОР | 1994 |
|
RU2069146C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2066627C1 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
| ИСТИРАЮЩАЯ МЕЛЬНИЦА | 1991 |
|
RU2029620C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2043917C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2022782C1 |
| ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2043915C1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2381099C2 |

Изобретение относится к машиностроительной промышленности, в частности к манипуляторам, предназначенным для выполнения вспомогательных операций, связанных с изменением положения деталей, сборочных операций. Каждая из рук манипулятора имеет рабочий орган и шарнирно соединенные звенья со своим приводом. Звено 4 ведущей руки выполнено в виде зубчатой рейки, по которой перемещается корпус 5 ведомой руки. Корпус 5 перемещается с помощью привода поступательного перемещения, электродвигателя и шестерни 7. На корпусе стоит колесо 8. От продольного и поперечного смещения колесо 8 удерживается подшипниками 9, 10. Подшипники 10 стоят между стенкой колеса 8 и опорной площадкой 11. На колесе закреплена шестерня 12 с внутренней резьбой. Вращается колесо 8 электродвигателем 13 с шестерней 14, входящей в зацепление с шестерней 12. На колесе закреплены звенья ведомой руки со своими шарнирными соединениями, приводами и рабочим органом. Блок управления подает команду на включение двигателю ведомой руки. Электродвигатель, вращая шестерню 7, поднимает корпус 5. Далее включается электродвигатель 13, который вращает шестерню 12. Блок управления приводит в определенное положение приводы звеньев 15 ведомой руки. Манипулятор готов к работе. По окончании работы блок управления возвращает манипулятор в исходное положение. Манипулятор может выполнять сборочные операции внутри корпусов машин и другого оборудования. 3 з.п. ф-лы, 3 ил.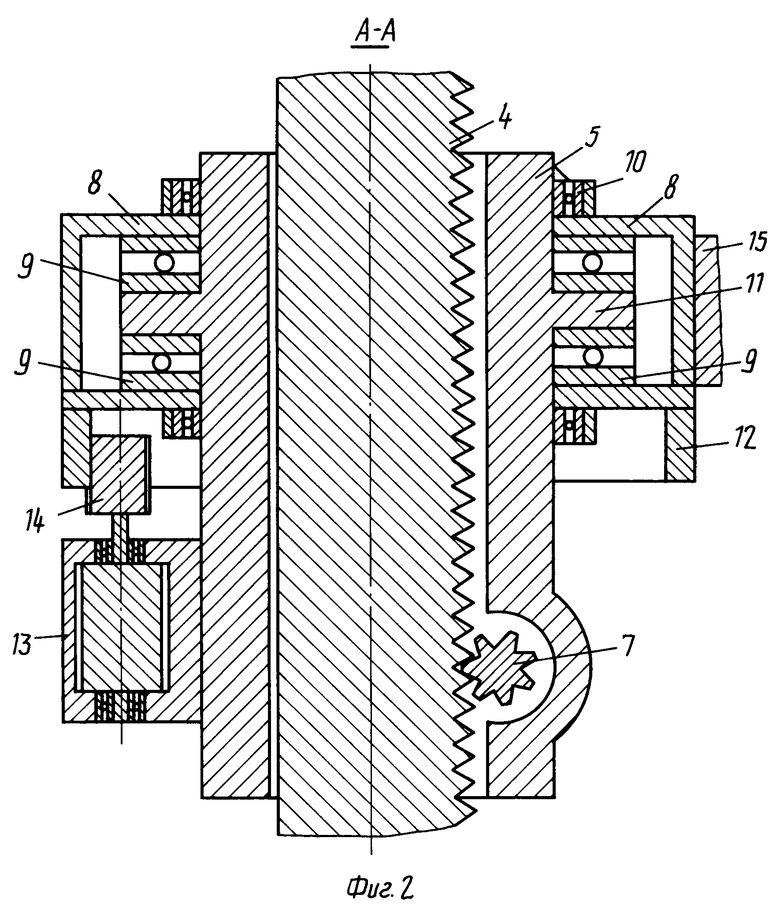
| Козырев Ю.Г | |||
| Промышленные роботы, М., 1983, с.114-Г. |
