Изобретение относится к машиностроению, в частности к роботам для автоматизации технологических процессов, содержащих транспортные операции.
Известны автоматические тягачи, обеспечивающие транспортирование подцепляемых к ним грузонесущих тележек.
Такие машины используются только внутри помещений с ровным покрытием, или на асфальтируемых площадках.
В качестве машин повышенной проходимости используются шагающие машины. Примером простых шагающих роботов может служить шестиногая шагающая машина с телескопическими конечностями. Каждая нога робота имеет две степени подвижности и работает в прямоугольной системе координат, что позволяет упростить устройство управления.
Экспериментальная электромеханическая шестиногая машина оснащена конечностями, имеющими две степени подвижности, причем первая вращательная (бедренный сустав), а вторая (коленный сустав) имеет телескопическую выдвижную конструкцию.
Шагающий робот этой конструкции имеет ряд недостатков: необходимость обеспечения равновесия и надежного сцепления с грунтом (опорной поверхностью); с трудом преодолевает препятствие в виде треугольных призм, лежащих на боковой поверхности близко друг к другу, имеющих острые грани, или глубоких оврагов с небольшими расстояниями между оврагами.
Цель изобретения расширение технологических возможностей.
Это достигается тем, что шагающий робот собирается из гибких лент, прикрепленных к стопам. Удерживается стопа посредством силовых элементов и рычагов. Силовые элементы прикреплены к корпусу и рычагам, рычаги к стопам. Шагающий робот может иметь три стопы и более.
На фиг. 1 изображен шагающий робот, общий вид; на фиг. 2- шагающий робот преодолевает препятствие.
Шагающий робот состоит из корпуса 1. Гибкие ленты 2 прикреплены к стопам 3, представляющим собой стержень из гибкого материала. Стопу держат рычаги 4, имеющие со стороны корпуса опорные пластинки 5, к которым посредством шаровых опор 6 крепятся силовые элементы 7. Другой стороной силовые элементы через шаровые опоры 8 крепятся к корпусу 1. В нижней части стопа имеет амортизирующую прокладку 9. Каждый силовой элемент подключен к блоку управления и может индивидуально включаться.
Шагающий робот работает следующим образом. Силовые элементы 7 сжимаются, поднимая рычаги 4 и одну стопу 3 над опорной поверхностью, и разжимаются, перенося стопу ближе к передней стопе. Затем включаются силовые элементы 7 следующей за ней стопы 3. Так передвигается робот. Изменяя направление перемещения стопы, меняют направление движения. Амортизирующие прокладки 9 служат для увеличения сцепления и более мягкого соприкосновения с поверхностью, на которой стоит.
Шагающий робот этой конструкции может свободно перемещаться по поверхности, имеющей много нешироких оврагов, или по острым боковым поверхностям призм, не теряя равновесия, может передвигаться по песчаному грунту и болотистой местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2043917C1 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2022782C1 |
| ДВУРУКИЙ МАНИПУЛЯТОР | 1994 |
|
RU2069146C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2066627C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2073602C1 |
| КОНВЕЙЕР | 1993 |
|
RU2043280C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| КОНВЕЙЕР | 1993 |
|
RU2041145C1 |
Изобретение относится к машиностроению, в частности к роботам для автоматизации технологических процессов, содержащих транспортные операции. Гибкие ленты 2 прикреплены к стопам 3, представляющим собой стержень из гибкого материала. Стопу держат рычаги 4, имеющие со стороны корпуса опорные пластинки 5, к которым посредством шаровых опор 6 крепятся силовые элементы 7. Другой стороной силовые элементы через шаровые опоры 8 крепятся к корпусу. В нижней части стопа имеет амортизирующую прокладку 9. Каждый силовой элемент подключен к блоку управления и может индивидуально включаться. Когда силовые элементы 7 сжимаются, то поднимаются рычаги 4 и одна стопа 3 над опорной поверхностью. Когда они разжимаются, то происходит перенос этой стопы ближе к передней стопе. Затем включаются силовые элементы 7 следующей за ней стопы 3. Так передвигается робот. Изменяя направление перемещения стопы, меняют направление движения. Амортизирующие прокладки 9 служат для увеличения сцепления и более мягкого соприкосновения с поверхностью, на которой стоит робот. Шагающий робот этой конструкции может свободно перемешаться по поверхности, имеющей много нешироких оврагов, или по острым боковым поверхностям призм, не теряет равновесия, может передвигаться по песчаному грунту и болотистой местности. 2 з.п. ф-лы, 2 ил.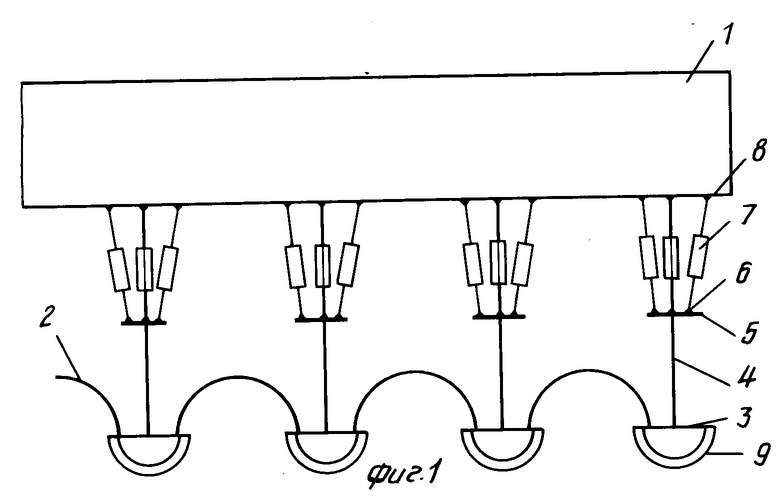
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник, М.: Машиностроение, 1988, с.149, рис.48. |
