Изобретение относится к машиностроению, в частности к роботостроению, и может быть использовано по манипулированию изделиями промышленными роботами различного назначения.
Целью изобретения является обеспечение возможности крепления предметов различной формы.
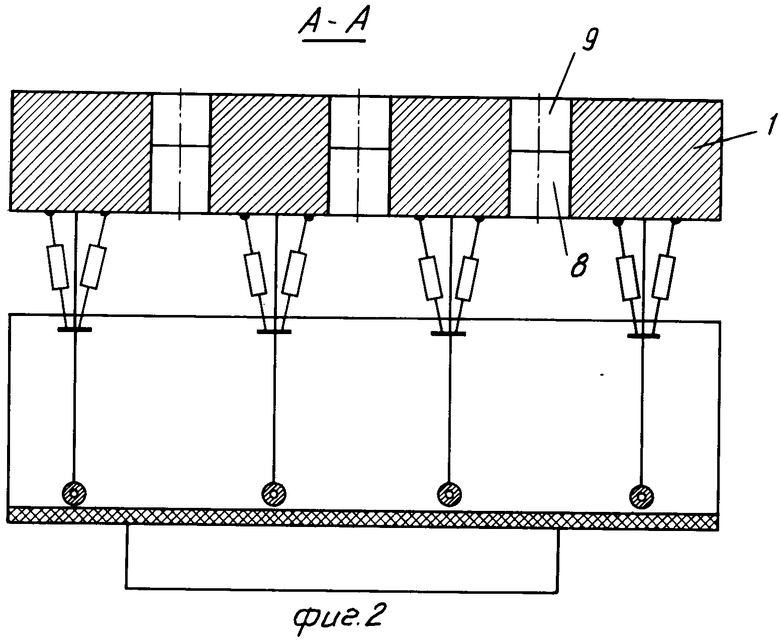
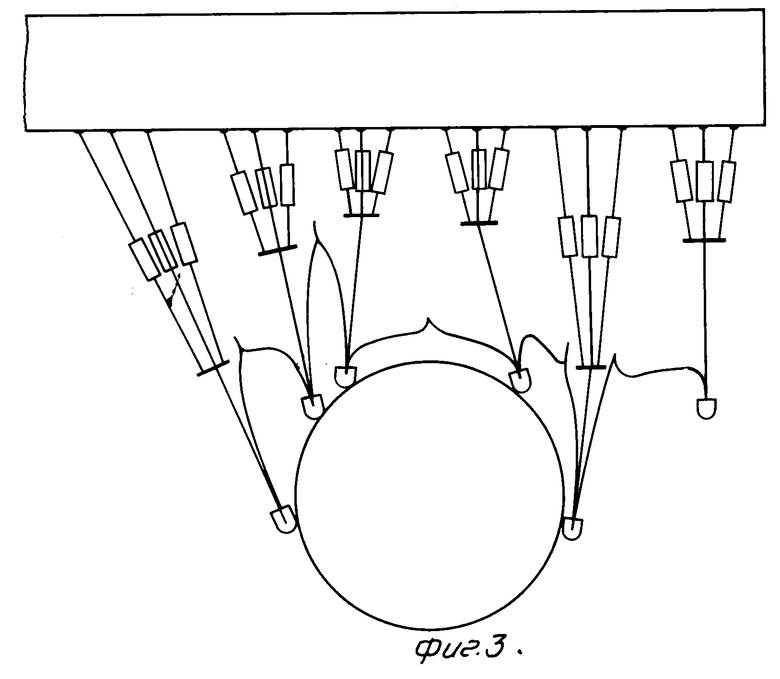
На фиг. 1 изображен захват, общий вид; на фиг. 2 разрез А-А на фиг.1; на фиг. 3 захват детали цилиндрической формы.
Захват состоит из корпуса 1, гибких лент 2, соединенных в гармошку. На нижнем конце лент укреплен рычаг 3, который имеет опорную пластину 4. Силовые элементы 5 через шаровые опоры 6 прикреплены к корпусу 1, в другой стороне через шаровые опоры 6 прикреплены к опорной пластине 4. Внизу гибкие ленты имеют амортизирующие прокладки 7, корпус имеет отверстия 8 для прохода кабелей и каналы 9. Каждый силовой элемент соединен с блоком управления и может индивидуально включаться.
Захват промышленного робота работает следующим образом. Захват опускается, разжимая звенья гибких лент 2. Силовые элементы сжимаются через рычаги 3, разводя соседние звенья из гибких лент. Если деталь попала между звеньев гибких лент 2, силовые элементы 5 разжимаются, через рычаги 3 амортизирующими прокладками 7 зажимают деталь. Когда деталь нужно освободить, силовые элементы 5 сжимаются, разводя соседние звенья. Деталь свободна. Захват готов к работе.
Если деталь невозможно захватить соседними звеньями, это можно сделать несколькими звеньями (фиг.3). Захват может работать с группой деталей одновременно (фиг.1).
Захват робота может использоваться для обслуживания кузнечно-прессового оборудования, автоматизации сборочных работ и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2022782C1 |
| ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2043915C1 |
| ДВУРУКИЙ МАНИПУЛЯТОР | 1994 |
|
RU2069146C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2073602C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2066627C1 |
| КОНВЕЙЕР | 1993 |
|
RU2043280C1 |
| Захватное устройство манипулятора | 1987 |
|
SU1521581A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
Изобретение относится к машиностроению, в частности к роботостроению, и может быть использовано по манипулированию изделиями промышленными роботами различного назначения. Захват состоит из корпуса 1, гибких лент 2, соединенных в гармошку. На нижнем конце лент укреплен рычаг 3, который имеет опорную пластину 4. Силовые элементы 5 через шаровые опоры 6 прикреплены к корпусу 1, с другой стороны через шаровые опоры прикреплены к опорной пластине 4. Внизу гибкие ленты имеют амортизирующие прокладки 7. Каждый силовой элемент соединен с блоком управления и может индивидуально включаться. При захвате детали захват опускается Силовые элементы 5 сжимаются через рычаги 3, разводя соседние звенья из гибких лент. Если деталь попала между звеньев гибких лент, силовые элементы разжимаются, через рычаги 3 амортизирующими прокладками 7 зажимают деталь. Когда деталь нужно освободить, силовые элементы сжимаются, разводя соседние звенья, деталь свободна. Захват может работать с группой деталей одновременно. 3 ил.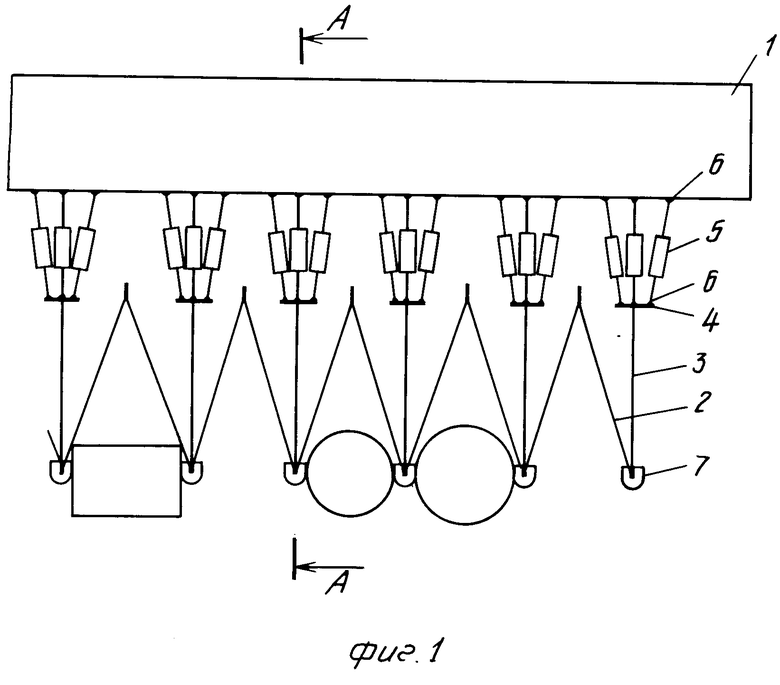
ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий корпус, опорную пластину, захватные элементы, кинематически связанные с приводом, отличающийся тем, что каждый захватный элемент выполнен в виде стержня, смонтированного на индивидуальной опорной пластине, при этом рабочий конец стержня снабжен амортизирующей прокладкой и связан с соседними стержнями захватных элементов дополнительно введенными упругими гибкими лентами.
| Захват манипулятора | 1986 |
|
SU1395482A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
