Изобретение относится к машиностроению,в частности к роботостроению, и может быть использовано по манипулированию изделиями промышленными роботами различного назначения, в том числе при механизации, автоматизации технологических процессов обработки.
Известно механическое захватное устройство, выполненное в виде пинцетов, находящихся под действием пружин. Разжим рабочих элементов таких захватных устройств происходит при контакте с заготовкой, из-за чего могут быть повреждены поверхности детали или зажимных элементов. Деталь удерживается вследствие упругого воздействия зажимных элементов, а высвобождается принудительно благодаря дополнительным устройствам. Эти захватные устройства применяют в условиях массового производства при манипулировании с объектами небольшой массы и габаритных размеров.
Известен захват манипулятора, смонтированный на руке промышленного робота, который имеет приводной элемент поступательного действия, направляющие, гибкую упругую ленту. Лента соединена средним перегибом со штоком приводного элемента. Крайние перегибы служат в качестве губок захвата. Это захватное устройство можно применять при манипулировании с объектами небольшой массы и габаритных размеров, однако захват не обеспечивает надежное удержание, при манипулировании деталями конусной формы, шара или пирамиды. Захват не может менять площадь соприкосновения и перемещать деталь в захвате.
Целью изобретения является повышение надежности захвата деталей.
Это достигается тем, что захват промышленного робота представляет собой полый цилиндрический корпус, внутри которого на силовых элементах или приводных механизмах держится гибкая лента, выполненная в виде кольца. С одной стороны силовой элемент шаровой опорой крепится к корпусу, с другой к опорной пластине и гибкой ленте. Причем каждый силовой элемент соединен с блоком управления и может индивидуально включаться.
На фиг. 1 изображен захват промышленного робота, общий вид; на фиг. 2 захват предмета формы призмы, вид сбоку (разрез А-А на фиг. 1).
Захват промышленного робота состоит из полого цилиндрического корпуса 1, внутри которого находится гибкая лента 2, выполненная в виде кольца и которая с помощью силовых элементов 3 располагается внутри корпуса. Силовой элемент с одной стороны через шаровую опору 4 крепится к корпусу, а с другой посредством шаровой опоры 5 скрепляется с опорной пластиной 6. Гибкая лента 2 закреплена на опорных пластинах 6. Корпус имеет отверстия для прохода кабелей 7.
Захват промышленного робота работает следующим образом.
Захват опускается, накрывая деталь, которая находится внутри гибкой ленты 2. Гибкая лента 2 с помощью силовых элементов 3 с двух противоположных сторон растягивается, сжимаясь, с других сторон, зажимая деталь. При разжатии детали гибкая лента 2 с помощью силовых элементов 3 возвращается в первоначальное положение. Деталь освобождается. Захват готов к работе.
Захват может зажимать деталь опорными пластинами 6 или, растягивая в двух местах гибкую ленту 2, одно напротив другого, сжимать деталь боковыми поверхностями гибкой ленты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2043917C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2022782C1 |
| ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2043915C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2073602C1 |
| ДВУРУКИЙ МАНИПУЛЯТОР | 1994 |
|
RU2069146C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2066627C1 |
| КОНВЕЙЕР | 1993 |
|
RU2043280C1 |
| КОНВЕЙЕР | 1993 |
|
RU2041145C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1993 |
|
RU2035366C1 |
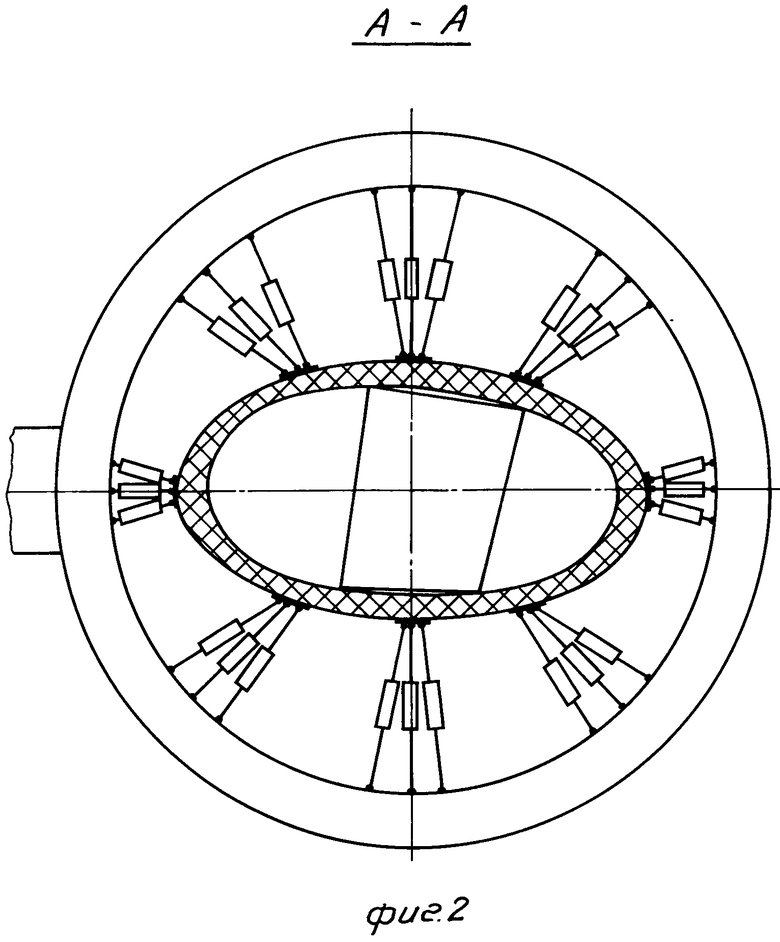
Изобретение относится к машиностроению, в частности к роботостроению, и может быть использовано по манипулированию изделиями промышленными роботами различного назначения, в том числе при механизации и автоматизации технологических процессов обработки. Захват промышленного робота состоит из полого цилиндрического корпуса 1, внутри которого находится гибкая лента 2, выполненная в виде кольца. С помощью силовых элементов 3 гибкая лента располагается внутри корпуса. Силовой элемент с одной стороны через шаровую опору 4 крепится к корпусу, а с другой посредством шаровой опоры 5 скрепляется с опорной пластиной 6. Гибкая лента 2 закреплена на опорных пластинах 6. Для захвата детали она должна быть размещена внутри гибкой ленты, которая охватывает деталь под действием силовых элементов. 2 ил.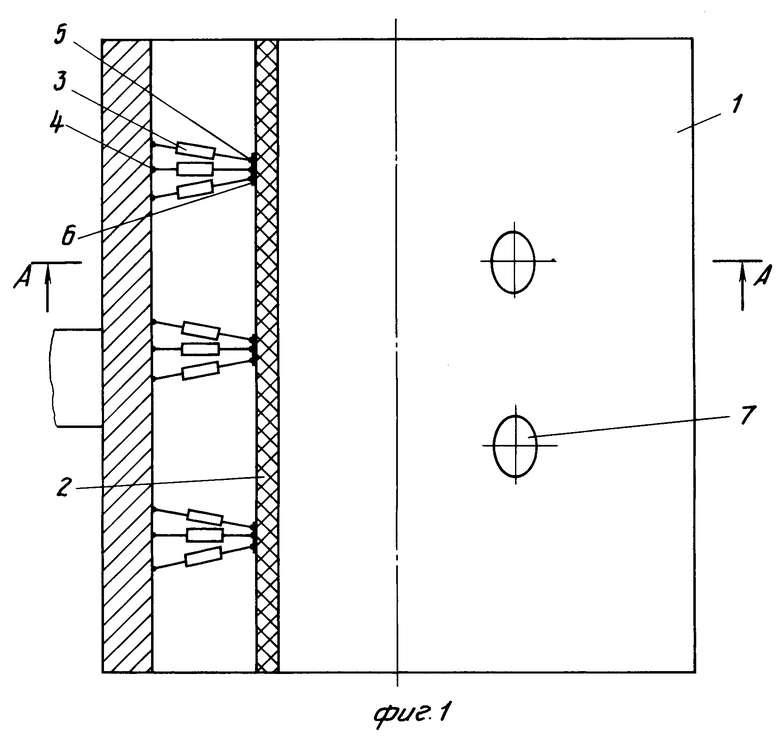
ЗАХВАТ, содержащий полый цилиндрический корпус, в котором расположены силовые элементы привода, связанные с захватным элементом в виде упругой гибкой ленты, отличающийся тем, что он снабжен дополнительными силовыми элементами, шарнирно смонтированными внутри цилиндрического корпуса, а каждый силовой элемент снабжен опорной пластиной, шарнирно связанной с его выходным звеном, при этом гибкая лента выполнена в виде замкнутого контура, расположенного внутри корпуса коаксиально ему, и смонтирована на опорных пластинах.
| Захват промышленного робота | 1975 |
|
SU571369A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
