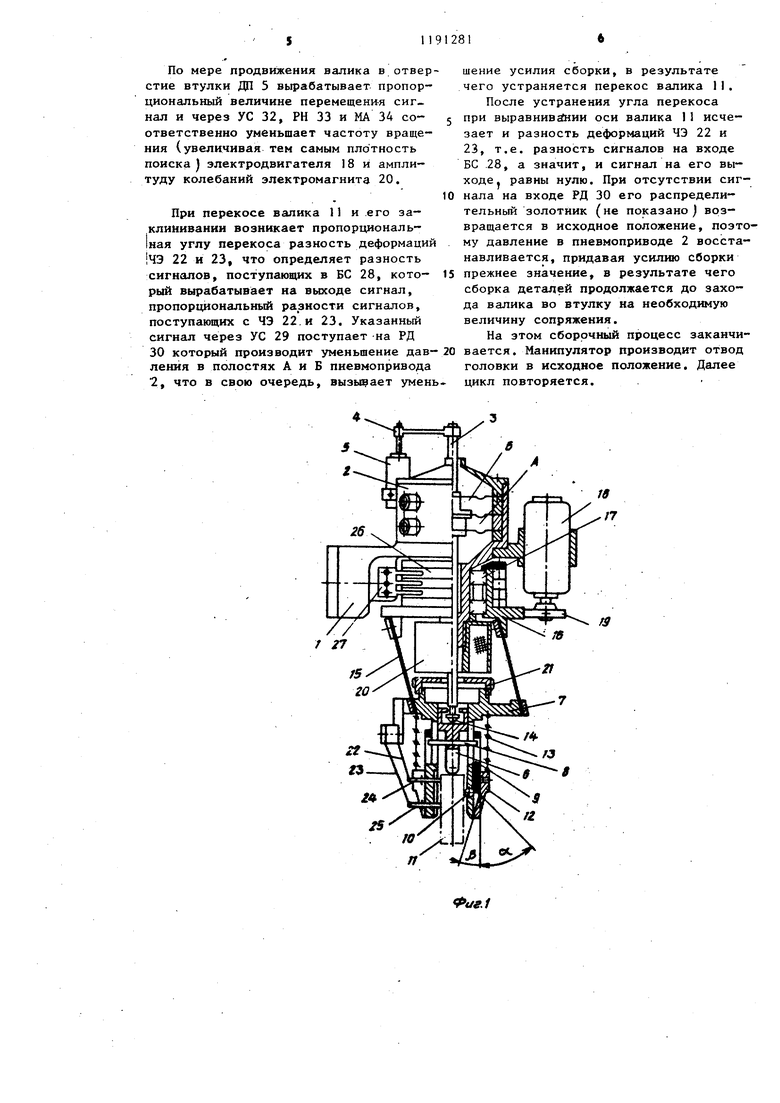
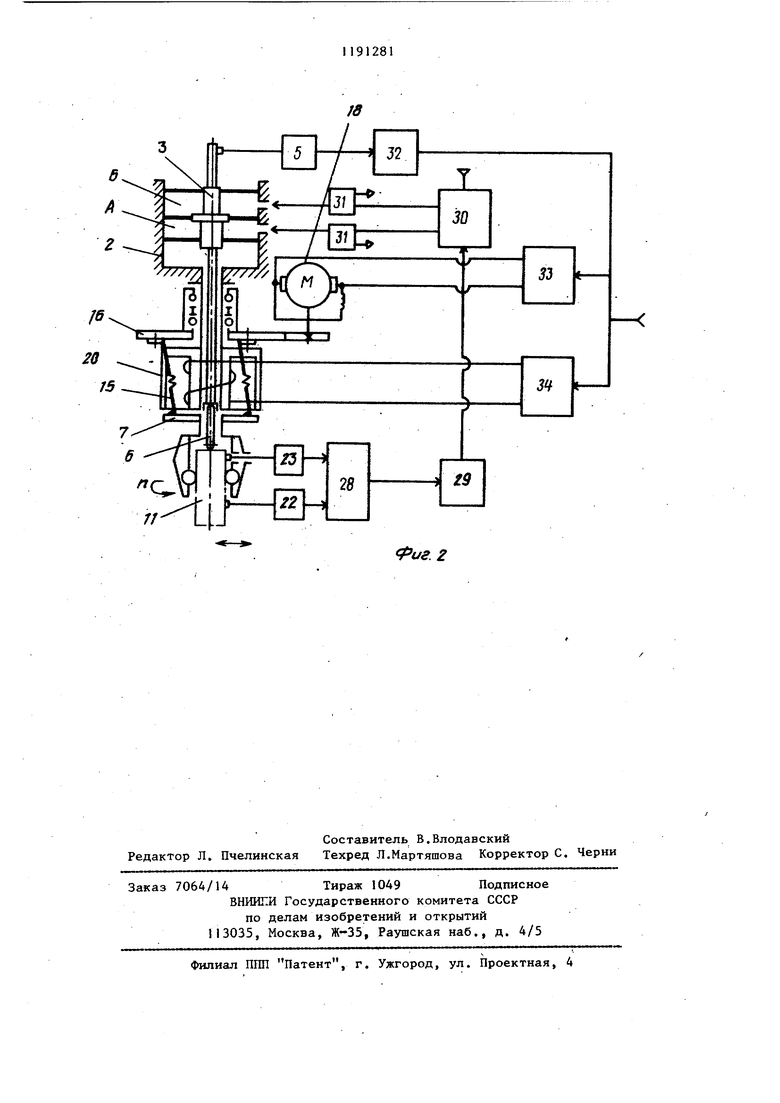
11 Изобретение относится к машиностроению, а именно к промьшшенным роботам и манипуляторам, предназначенным для сборки деталей типа валвтулка. Цель изобретения - повышение надежности сборки и расширение функциональных возможностей манипулятора путем автоматического управления тра екторией поискового движения вала и режимами сборки, исключающими заклинивание вала на всех этапах его ориентирования и установки. На фиг. 1 изображена сборочно-захватная головка, общий вид; на фиг. 2 - блок-схема сборочно-захватной головки. Сборочно-захватная головка содержит закрепленный на руке манипулятора корпус 1 (фиг. 1), на котором неподвижно установлен трехмембранный пневмопривод 2 с двумя рабочими полостями А и Б, содержащий в качестве выходного звена шток-толкатель, выполненный в виде двух последовательно расположенных звеньев - собственно штока 3, соединенного верхним концом, посредством рычага 4 с сердечником датчика перемещений 5, и толкателя 6, размещенного в захватном органе 7 и кинематически связанного посредством штифта 8 с втулкой 9, имеющей на внутренней поверхности конус с углом 0 уклона i величина которого больше угла трения в месте контакта шариков 10 (размещенных по окружности } с захватываемой поверхностью детали типа валик 11. Втулка 9 и закрепленная на ней для фиксации шариков 10 втулка 12 подпружинены пружиной 13. Причем угол /3 внутреннего конуса фиксирующей втулки 12 (в отличие от угла оС ) меньше угла трения в месте контакта шариков 10 с валиком 11 с целью обеспечения зажи- ма последнего при транспортировке на позицию сборки. Шток 3 и толкатель 6 соединены между собой шарниром 14, имеющим боковые зазоры, превьппающие величину (амплитуду ) радиального смещения захватного органа 7 относительно корпу са 1 . Упругие элементы 15, выполненные в виде плоскопараллельных пружин, несущих захватный орган 7, закреплены на торце ведомого колеса 16, установленного на опорах качения 12 (подшипниках ) 17 и снабжены приводом вращения от электродвигателя 18 постоянного тока .через ведущее колесо 19. На корпусе пневмопривода 2 неподвижно закреплен электромагнит 20, служащий для воздействия через регулировочное ярмо 21 на захватный орган 7. В плоскости осевого сечения захватного-органа 7 установлены чувствительные элементы 22 и 23, контактирующие через износостойкие наконечники соответственно 24 и 25 с захватьшаемым валиком 11. Чувствительные элементы (ЧЭ ) вьшолнены в виде плоских пружин с наклеенными на них тензорезисторами, величина деформации которых определяет изменение их электрического сопротивления, а значит и тока сети, в которую они включены. Так как захватный орган совершает вращательное, двилсение, то вьшоды ЧЭ подсоединены к коллекторным кольцам 26, собранным в пакет, закрепленный на ведомом колесе 16, и контактирующим при вращении с токосъемными;щетками 27, неподвижно закрепленным на корпусе 1 . I ЧЭ (фиг. .2) подключены к блоку 28 суммирования (БС ), который через усилитель 29 сигналов (УС)соединен с регулятором 30 давления (РД|, в свою очередь, сопряженнь1М посредством пневмоклапанов (ПК ) 31 с рабочими полостями А и Б пневмопривода 2. Имеющийся в головке датчик 5 перемещений (ДП), через УС 32 соединен с регулятором 33 напряжения (РК, подключенным параллельно к обмотке возбуждения электродвигателе 18. Кроме того, датчик 5 перемещений также подключен к модулятору 34 амплитуды (мл), соединенному с обмоткой электромагнита 20. Сборочно-захватная головка работает Следующим образом. Головка закрепленная на руке манипулятора (не показано ) посредством корпуса 1, доставляется на позицию выдачи одной из сопрягаемых деталей и производит захват валика 11, При этом с циклового программного устройства ( ЦПУ ) манипулятора поступает сигнал на включение одного из пневмоклапанов 31, соединенного с поло-, стью А пневмопривода 2. Под действием давления, созданного в полости А, шток 3, перемещаясь вверх, одновременно через толкатель 6, штифт 8 и
31
втулку 9 тянет фиксирующую втулку 12, деформируя при этом пружину 13. Втулка 12, набегая внутренним кону сом с углом /3 на шарики 10, производит их фиксацию, в результате чего и происходит зажим валика 11. После доставки валика 11 на позицию сборки манипулятор по команде с ЦПУ устанавливает головку с валиком 1 1 отверстием сопрягаемой втулки, установленной в базовом приспособлении (не показано ). Далее, не снимая давления в полости А пневмопривода 2, п сигналу с ЦПУ манипулятора включают второй пневмоклапан 31, в результате чего создается давление в полости Б пневмопривода 2.. Шток 3 вследствие разности эффективных площадей мембран пневмопривода 2 перемещается вниз и посредством толкателя 6 осу- ществляет прижим валика 11 в торцу сопрягаемой втулки.
При этом втулка 12 под действием пружины 13 освобождает шарики 10, после чего втулка 9 под действием той же пружины 13 набегает.конической поверхностью с углом оС на шарики 10, но так как угол л(в отличие от угла у5 ) значительно больше угла трения, то втулка 9 не фиксирует шарики 10, а лишь поджимает их к валику I1, производя тем самым выборку зазора между последними, что необходимо в повьшдения точности последующего сканирования,
Если погрешность относительной ориентации собираемых деталей боль1пе зазора в их соединении, то сборка невозможна, отсутствует перемещение штока 3, о чем свидетельствуют показания ДП 5. По сигналу ЦПУ манипулятора включается электромагнит 20, сообщающий через ярмо 21 захватному органу 7, установленному на упругих элементах 15, колебательные движения с постоянной частотой и амплитудой, превышающей или равной погрешности от носительной ориентации. Одновременно с электромагнитом 20 включается элект родвигатель 18, который через ведущее 19 и ведомое 16 колеса, сообщает вращательное движение упругим элементам 15, обеспечивая тем самым изменение направления смещения захватного органа 7, т.е. равнозначное сканирование всей области рассогласования объектов сборки. Валик 11 (не ьращаясь ) в результате суммы двух движе2814
НИИ - вынужденных радиальных колебаний и вращения упругих элементов 15, совершает поисковые движения по траетории, соответствующим этапам сог1ря- жения.
При совмещении контуров валика и втулки происходит западание валика в отверстие сопрягаемой втулки под действием усилия сборки, определяемого давлением в полостях А и Б пневмопривода 2 и сообщаемого валику 1I через шток 3 и толкатель 6. Причем усилие сборки всегда приложено по центру валика, так как толкатель 6 совершает радиальные колебания совместно с валикрм 11, вследствие того что боковые зазоры в шарнире 14, соединяющем подвижный толкатель 6 и неподвижный в радиальном направлении шток 3, больше величины радиального смещения захватного органа 7.
Сохранение точки приложения сборочного усилия позволяет исключить дЬполнительный опрокидывающий момент при смещении валика, т.е. предупреждать перекос и заклинивание. I
Дальнейшее вертикальное перемещение валика 11, а значит и штока 3, регистрируется ДП 5, который через УС 32 подает сигнал на РН 33, управляющий частотой вращения электродвигателя 18. При этом РН 33, уменьшая величину питакицего напряжения, пропорционально сигналу ДП 5, производит уменьшение числа оборотов электродвигателя 18 н через колеса 19 и 16 соответствующее их передаточному отношению число оборотов упругих элементов 15, что в результате приводит к увеличению плотности поиска и увеличению числа колебаний захватного органа 7, приходящихся на один его оборот вокруг оси.
Одновременно сигнал от ДП 5 через УС 32 поступает на МА 34, уменьшающий амплитуду колебаний электромагнитом 20 до значения
. ,
где а г- амплитуда колебаний на втором этапе сопряжения; Л - размер фаски отверстия, если таковая имеется; cTj - величина зазора в соединении вал-втулка, определяемая точностью сопряжения.
По мере продвижения валика в отверстие втулки ДП 5 вырабатывает пропор циональный величине перемещения сигнал и через УС 32, РН 33 и МА 34 соответственно уменьшает частоту вращения (увеличивая тем самым плотность поиска ) электродвигателя 18 и амплитуду колебаний электромагнита 20.
При перекосе валика 11 и его заклиниваиии возникает пропорциональная углу перекоса разность деформаций ЧЭ 22 и 23, что определяет разность сигналов, поступающих в БС 28, который вырабатывает на выходе сигнал, пропорциональный разности сигналов, поступающих с ЧЭ 22.и 23. Указанный сигнал через УС 29 поступает на РД 30 который производит уменьшение давления в полостях А и Б пневмопривода 2, что в свою очередь, вызывает умень
шение усилия сборки, в результате чего устраняется перекос валика П.
После устранения угла перекоса при выравниваСнии оси валика 1 1 исчезает и разность деформаций ЧЭ 22 и 23, т.е. разность сигналов на входе БС .28, а значит, и сигнал на его выходе j равны нулю. При отсутствии сигнала на входе РД 30 его распределительный золотник (не показано) возвращается в исходное положение, позтому давление в пневмоприводе 2 восстанавливается, придавая усилию сборки прежнее значение, в результате чего сборка деталей продолжается до захода валика во втулку на необходимую величину сопряжения.
На этом сборочный процесс заканчивается. Манипулятор производит отвод головки в исходное положение. Далее цикл повторяется.
fS
П с
fife. 2 
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочная головка с автопоиском | 1984 |
|
SU1227401A1 |
| Устройство для сборки деталей типа вал-втулка | 1990 |
|
SU1780980A1 |
| Устройство относительного ориентирования для сборочного станка-автомата | 1978 |
|
SU770725A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Устройство для сборки деталей типа вал-втулка | 1984 |
|
SU1177112A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Захватная головка манипулятора | 1976 |
|
SU613891A1 |
| Устройство для сборки деталей | 1982 |
|
SU1049229A2 |
| Устройство для сборки деталей | 1987 |
|
SU1535691A1 |
1. СБОРОЧНО-ЗАХВАТНАЯ ГОЛОВКА МАНИПУЛЯТОРА, содержащая корпус с закрепленными на нем электромагнитным вибратором и упругими элементами, выполненными в виде плоскопараллельных пружин, соединенньк с захватным органом, снабженным пневмоприводом, и регулируемое ярмо, отличающаяся тем, что, с целью повышения надежности сборки и расширения функциональньрс возможностей манипулятора, упругие элементы снабжены электроприводом с регулируемой частотой вращения, соединенным через регулятор питающего напряжения с датчиком линейных перемещений, установленным на штоке пневмопривода захватного органа, причем указанный датчик также соединен через модулятор амплитуды с электромагнитным вибратором, а захватный орган снабжен устройством контроля угла перекоса собираемой детали. 2.Головка манипулятора по п. 1, отл.ичающаяся тем, что, устройство коцтроля угла перекоса собираемой детали выполнено в виде не менее двух чувствительных элементов расположенных в штоскостн осевого сечения захватного органа и соединенных через блок суммирования сигналов с регулятором давления пневмопривода захватного органа. 3.Головка манипулятора по п. 1, отличающаяся тем, что § шток пневмопривода захватного органа выполнен в виде двух звеньев, сое(Л диненных между собой шарниром с боко вым зазором, превыпающим величину радиального смещения захватного органа. 4.Головка манипулятора по п. 1, отличающаяся тем, что захватный орган выполнен в виде шарикового зажимного механизма, кинет д х магически связанного со штоком пневмопривода и снабженного втулкой с коническим отверстием, угол конуса которого превьшает угол трения втулки с шариками, причем указанная втулка установлена противоположно звену, фиксиру|рцему эти шарики.
| Захватная головка манипулятора | 1979 |
|
SU770790A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
