Изобретение относится к машиностроению, в частности, роботостроению и может быть использовано по манипулированию изделиями промышленными роботами различного назначения.
Известно захватное устройство, содержащее шарнирно соединенные с ладонью пальцы, выполненные в виде шарнирно соединенных между собой промежуточных звеньев, пружинящего элемента, проходящей через отверстия в звеньях гибкой тяги и привода. Это захватное устройство можно применять при манипулировании с объектами небольшой массы и габаритных размеров, однако захват не обеспечивает надежное удержание при манипулировании деталями конусной формы, шара или пирамиды.
Целью изобретения является расширение функциональных возможностей.
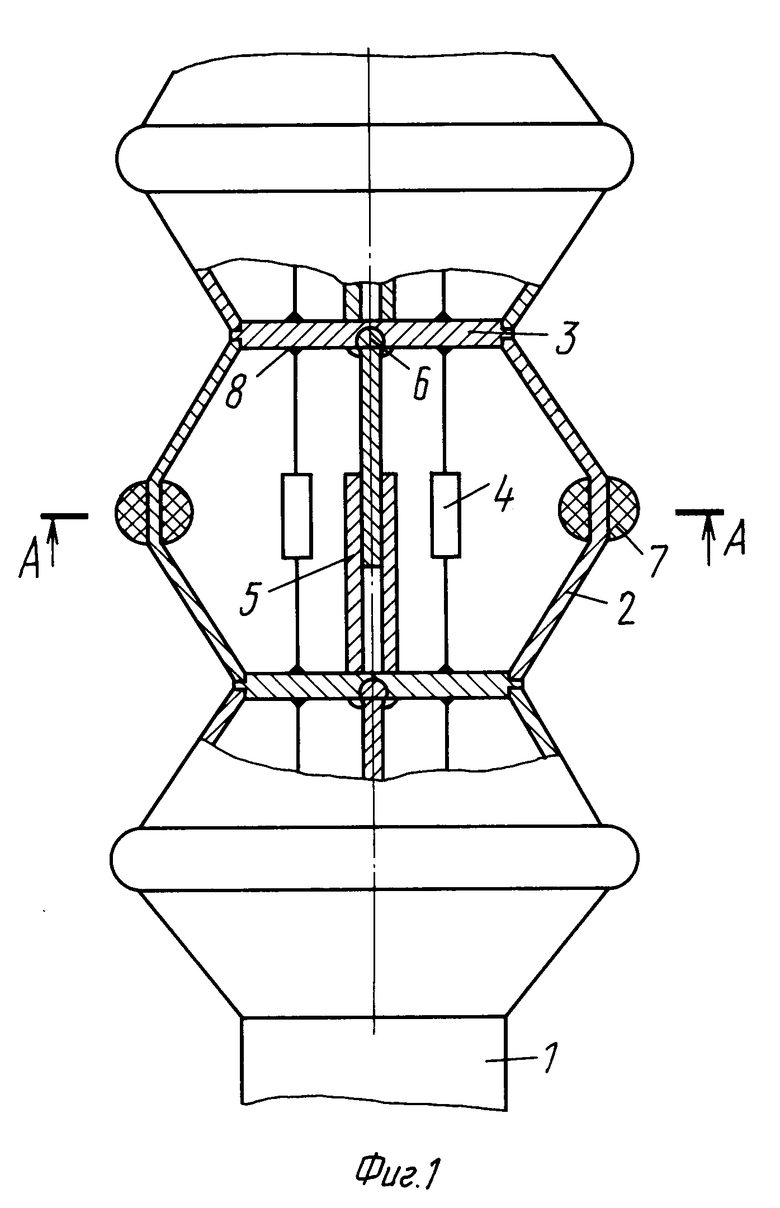
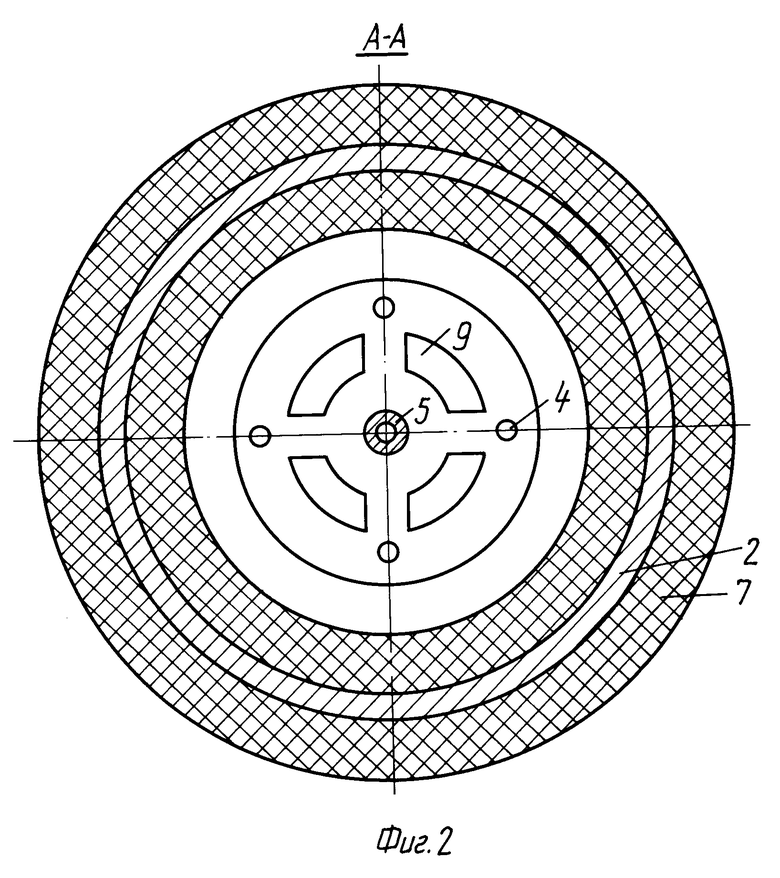
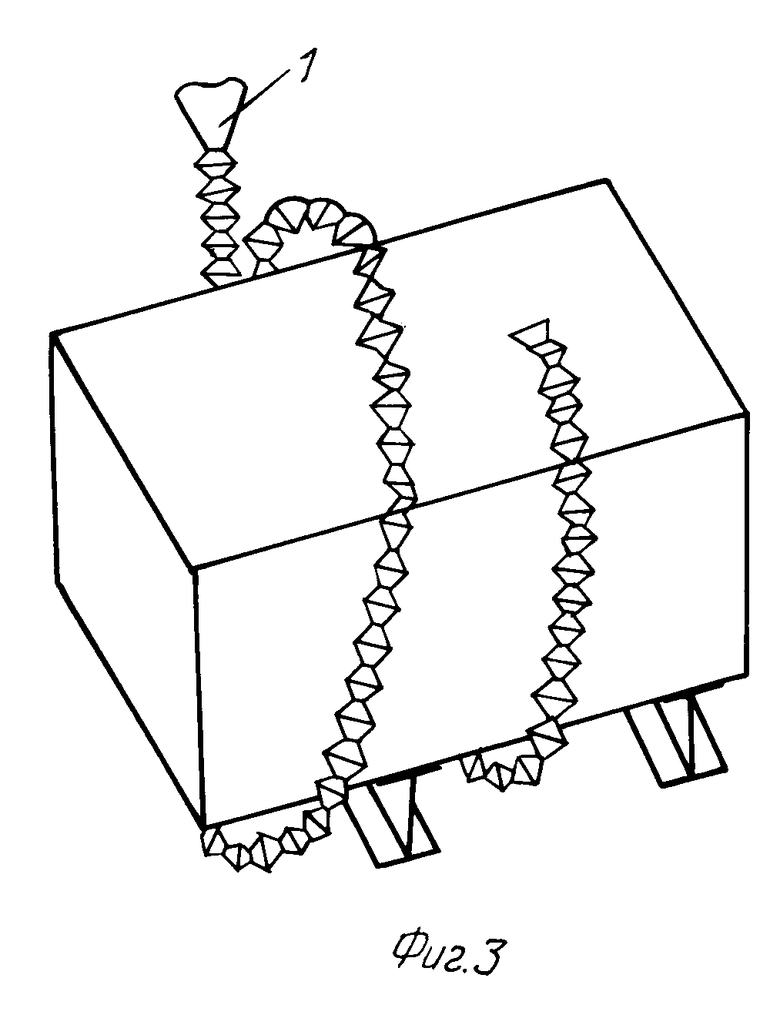
На фиг. 1 изображен захват промышленного робота, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - захват крупной детали.
Захват промышленного робота выполнен в виде соединенного с рукой робота 1 гибкого пальца, имеющего соединенные между собой приводные звенья. Каждое звено выполнено в виде симметрично выпуклой в средней части кольцевой упругой оболочки 2. Упругие оболочки соседних звеньев своими сопрягаемыми между собой краями смонтированы на общих круглых пластинах 3, соседние из которых соединены между собой установленными на них приводными элементами 4 и телескопическими стержнями 5. Стержни 5 смонтированы на пластинах одним концом жестко, а другим - посредством шарнира 6. На наружной и внутренней поверхностях средней части упругой оболочки смонтированы кольцевые амортизирующие прокладки 6, 7. При этом приводные элементы 4 смонтированы на пластинах 3 посредством шаровых опор 8. Кольцевая пластина имеет отверстия для прохода кабеля 9.
Захват работает следующим образом.
По сигналу от системы управления приводятся в движение приводные элементы 4, которые обеспечивают перемещение пластин 3. Это вызывает деформацию оболочек 2, чем при приближении амортизирующих прокладок 7 к детали обеспечивается ее зажим и удержание. Зажим небольшой детали может осуществляться соседними между собой звеньями, а крупной - путем ее охвата всем гибким пальцем робота.
Освобождение детали осуществляется обратным движением элементов захвата по сигналу от системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2043917C1 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
| ДВУРУКИЙ МАНИПУЛЯТОР | 1994 |
|
RU2069146C1 |
| ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2043915C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2073602C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| МАНИПУЛЯТОР | 1994 |
|
RU2066627C1 |
| КОНВЕЙЕР | 1993 |
|
RU2041145C1 |
| КОНВЕЙЕР | 1993 |
|
RU2043280C1 |
| СТРУЙНАЯ МЕЛЬНИЦА | 1993 |
|
RU2049558C1 |
Изобретение относится к машиностроению, в частности роботостроению и может быть использовано по манипулированию изделиями промышленными роботами различного назначения. Захват промышленного робота выполнен в виде шарнирно соединенного с рукой робота гибкого пальца в виде шарнирно соединенных между собой приводных звеньев и снабжен системой управления, а каждое звено выполнено в виде симметрично выпуклой в средней части кольцевой упругой оболочки. Упругие оболочки соседних звеньев своими сопрягаемыми между собой краями смонтированы на общих круглых пластинах. Соседние из пластин соединены между собой шарнирно установленными на них приводными элементами и телескопическими стержнями. На наружной и внутренней поверхностях средней части каждой упругой оболочки смонтированы кольцевые амортизирующие прокладки. Соединение приводных элементов с пластинами шарнирно. 1 з.п. ф-лы, 3 ил.
| Захватное устройство | 1985 |
|
SU1278205A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
