Изобретение относится к вычислительной технике и предназначено для ввода информации в ЭВМ о положении рук водителя на ободе рулевого колеса в тренажерах транспортных средств.
Имеется устройство для ввода информации в ЭВМ от множества коммутационных элементов [1] , содержащее дешифратор адреса, шинный формирователь, пять элементов И, два элемента ИЛИ, два триггера, счетчик, генератор импульсов, блок оперативной памяти, группу элементов И и группу элементов И-НЕ, причем вход дешифратора адреса и вход-выход шинного формирователя являются соответствующими входом и выходом устройства для подключения к шинам адреса и данных микроЭВМ, первый вход i-го элемента И-НЕ группы (i= ) является i-м входом дискретного сигнала и соединен с первым входом i-го элемента И группы, выход которого соединен с выходом i-го элемента И-НЕ группы и подключен к группе входов первого элемента И, первый выход дешифратора адреса соединен с первыми входами второго и третьего элементов И, второй вход второго элемента И соединен с выходом первого элемента ИЛИ, а выход второго элемента И соединен с входом выборки шинного формирователя, вход задания направления передачи которого является входом устройства для подключения к выходу команды "ввод" микроЭВМ и соединен с первым входом первого элемента ИЛИ, второй вход которого является входом устройства для подключения к выходу команды "вывод" микроЭВМ и соединен с вторым входом третьего элемента И, второй выход дешифратора адреса соединен с первыми входами четвертого и пятого элементов И, вторые входы которых соединены соответственно с входами устройства для подключения к выходам команд "вывод" и "ввод" микроЭВМ, выход шинного формирователя соединен с информационным входом блока оперативной памяти, выходы четных и нечетных разрядов которого соединены соответственно с вторыми входами элементов И и И-НЕ групп, выход пятого элемента И соединен с установочным входом первого триггера, вход сброса и выход которого соединены соответственно с выходом переноса счетчика и входом генератора импульсов, выходом подключенного к первому входу второго элемента ИЛИ, выход которого соединен со счетным входом счетчика, а второй вход - с выходом третьего элемента И и входом записи-чтения блока оперативной памяти, адресный вход которого подключен к выходу счетчика, информационный вход шинного формирователя подключен к выходу второго триггера, входы сброса и установки которого соединены соответственно с выходами четвертого и первого элементов И, выход первого триггера подключен к входу первого элемента И.
) является i-м входом дискретного сигнала и соединен с первым входом i-го элемента И группы, выход которого соединен с выходом i-го элемента И-НЕ группы и подключен к группе входов первого элемента И, первый выход дешифратора адреса соединен с первыми входами второго и третьего элементов И, второй вход второго элемента И соединен с выходом первого элемента ИЛИ, а выход второго элемента И соединен с входом выборки шинного формирователя, вход задания направления передачи которого является входом устройства для подключения к выходу команды "ввод" микроЭВМ и соединен с первым входом первого элемента ИЛИ, второй вход которого является входом устройства для подключения к выходу команды "вывод" микроЭВМ и соединен с вторым входом третьего элемента И, второй выход дешифратора адреса соединен с первыми входами четвертого и пятого элементов И, вторые входы которых соединены соответственно с входами устройства для подключения к выходам команд "вывод" и "ввод" микроЭВМ, выход шинного формирователя соединен с информационным входом блока оперативной памяти, выходы четных и нечетных разрядов которого соединены соответственно с вторыми входами элементов И и И-НЕ групп, выход пятого элемента И соединен с установочным входом первого триггера, вход сброса и выход которого соединены соответственно с выходом переноса счетчика и входом генератора импульсов, выходом подключенного к первому входу второго элемента ИЛИ, выход которого соединен со счетным входом счетчика, а второй вход - с выходом третьего элемента И и входом записи-чтения блока оперативной памяти, адресный вход которого подключен к выходу счетчика, информационный вход шинного формирователя подключен к выходу второго триггера, входы сброса и установки которого соединены соответственно с выходами четвертого и первого элементов И, выход первого триггера подключен к входу первого элемента И.
Данное устройство обеспечивает ввод данных с предварительным вычислением булевых функций от сигналов одновременно срабатывающих коммутационных элементов, однако ориентирован только на последовательную локальную обработку нескольких из множества дискретных сигналов. Этот недостаток не позволяет его использовать для ввода информации о положении рук водителя, характерным для которого является необходимость одновременной обработки дискретных сигналов от датчиков касания, размещенных по всему полю поверхности обода рулевого колеса.
Наиболее близким по своей технической сущности к предлагаемому является устройство для ввода информации [2], содержащее генератор тактовых импульсов, два счетчика, триггер, два регистра, дешифратор, мультиплексор, блок коммутационных элементов, блок устранения дребезга и блок сравнения, входы первой группы которого соединены с выходами первого счетчика, входы второй группы - с выходами первого регистра и информационными входами второго регистра, а выход - с информационным входом триггера, тактовый вход которого соединен с тактовым входом первого регистра, выходом блока устранения дребезга и тактовым входом второго счетчика, причем входы блока коммутационных элементов соединены с выходами дешифратора, а выходы - с информационными входами мультиплексора, адресные входы которого соединены с входами дешифратора, информационными входами первого регистра и выходами первого счетчика, вход которого соединен с выходом генератора тактовых импульсов, вход управления второго счетчика соединен с выходом триггера, а выход - с тактовым входом второго триггера, вход блока устранения дребезга соединен с выходом мультиплексора, выходы второго регистра являются выходами устройства.
Данное устройство ориентировано на последовательный опрос состояния множества коммутационных элементов, однако исключает ввод информации в ЭВМ при одновременном замыкании нескольких из них. Это является недостатком данного устройства, не позволяющим осуществить ввод информации о положении рук водителя, для которого характерно одновременное замыкание нескольких из множества расположенных на поверхности обода рулевого колеса коммутационных элементов.
Целью изобретения является осуществление оперативного ввода информации в ЭВМ о положении рук водителя на ободе рулевого колеса за счет одновременной обработки сигналов от коммутационных элементов, расположенных на его поверхности.
Цель достигается тем, что в устройство для ввода информации, содержащее блок коммутационных элементов (блок датчиков касания руля), имеющий N выходов, первый и второй N-разрядные регистры, введены первый и второй датчики касания правой и левой рук, блок определения среднего из замкнутых датчиков касания, имеющий N входов и N выходов, входы которого подключены к соответствующим выходам блока датчиков касания руля, N элементов запрета, информационные входы которых подключены к соответствующим выходам блока определения среднего из замкнутых датчиков касания, а выходы соединены с соответствующими информационными входами первого и второго регистров, первый и второй шифраторы, входы которых подключены к выходам соответственно первого и второго регистров, причем j-е выходы первого регистра (j= ) cоединены с первыми запрещающими входами одноименных элементов запрета, j-е выходы второго регистра соединены с вторыми запрещающими входами одноименных элементов запрета, первые выходы первого и второго датчиков касания рук соединены с (N+1)-ми входами сброса соответственно первого и второго регистров, вторые выходы первого и второго датчиков касания рук соединены с (N+2)-ми входами стробирования соответственно первого и второго регистров и являются первым и вторым выходами запроса ввода информации из устройства, а выходы первого и второго шифраторов являются соответственно первым и вторым информационными выходами устройства.
) cоединены с первыми запрещающими входами одноименных элементов запрета, j-е выходы второго регистра соединены с вторыми запрещающими входами одноименных элементов запрета, первые выходы первого и второго датчиков касания рук соединены с (N+1)-ми входами сброса соответственно первого и второго регистров, вторые выходы первого и второго датчиков касания рук соединены с (N+2)-ми входами стробирования соответственно первого и второго регистров и являются первым и вторым выходами запроса ввода информации из устройства, а выходы первого и второго шифраторов являются соответственно первым и вторым информационными выходами устройства.
Сущность изобретения заключается в следующем. При касании одной из рук водителя обода рулевого колеса из N расположенных радиально на его поверхности датчиков касания руля срабатывает от одного до L датчиков, соответствующих варьируемой ширине тактильного отпечатка руки на поверхности рулевого колеса вдоль его окружности. (L<<N). Из этих сигналов устройство определяет средний из замкнутых датчиков касания руля и запоминает его в одном из регистров, соответствующем сработавшему датчику касания руки. Поскольку каждый датчик касания руля однозначно соответствует определенному участку обода, то на выходе соответствующего шифратора формируется код, который вводится в ЭВМ в качестве текущего положения данной руки на ободе рулевого колеса.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается от него наличием новых блоков: двух датчиков касания, блока определения среднего из замкнутых датчиков касания, N элементов запрета, двух шифраторов и их связями между собой и с остальными блоками устройства. Таким образом, заявляемое устройство соответствует критерию изобретения "новизна".
Сравнение предлагаемого решения с другими техническими решениями показывает, что датчики касания, блок определения среднего из замкнутых датчиков касания, элементы запрета и шифраторы широко известны и легко могут быть реализованы на существующей элементной базе, однако вышеуказанные блоки проявляют новые свойства в указанной взаимосвязи, что приводит к осуществлению оперативного ввода информации в ЭВМ о положении рук водителя на ободе рулевого колеса. Это позволяет сделать вывод о соответствии технического решения критерию "существенные отличия".
На фиг. 1 приведена функциональная схема устройства для ввода информации; на фиг. 2 и 3 представлены функциональные схемы блока определения среднего из замкнутых датчиков касания руля и блока датчиков касания руля соответственно; фиг. 4 иллюстрирует варианты касания рук водителя обода рулевого колеса; на фиг. 5 приведен пример размещения контактных датчиков на поверхности обода рулевого колеса; на фиг. 6 представлена функциональная схема датчика касания руки; фиг. 7 иллюстрирует пример размещения контактных датчиков на кисти руки водителя.
Устройство для ввода информации содержит (фиг. 1) последовательно соединенные блок 1 датчиков касания руля и блок 2 определения среднего из замкнутых датчиков касания руля, первый 3 и второй 4 датчики касания рук водителя, первый 5 и второй 6 регистры, N элементов 71,...,7Nзапрета, информационные входы которых подключены к соответствующим выходам блока 2 определения среднего из замкнутых датчиков касания руля, а выходы соединены с соответствующими информационными входами первого 5 и второго 6 регистров, первый 8 и второй 9 шифраторы, входы ко-торых подключены к выходам соответствен- но первого 5 и второго 6 регистров, причем выходы первого регистра 5 соединены с первыми запрещающими входами соответствующих элементов 71,..., 7N запрета, выходы второго регистра 6 соединены с вторыми запрещающими входами соответствующих элементов 71,...,7N запрета, первые выходы первого 3 и второго 4 датчиков касания рук водителя соединены с (N+1)-ми входами сброса соответственно первого 5 и второго 6 регистров, вторые выходы первого 3 и второго 4 датчиков касания рук водителя соединены с (N+2)-ми входами стробирования первого 5 и второго 6 регистров и являются первым и вторым выходами запроса на вход информации из устройства, а выходы первого 8 и второго 9 шифраторов являются соответственно первым и вторым информационными выходами устройства.
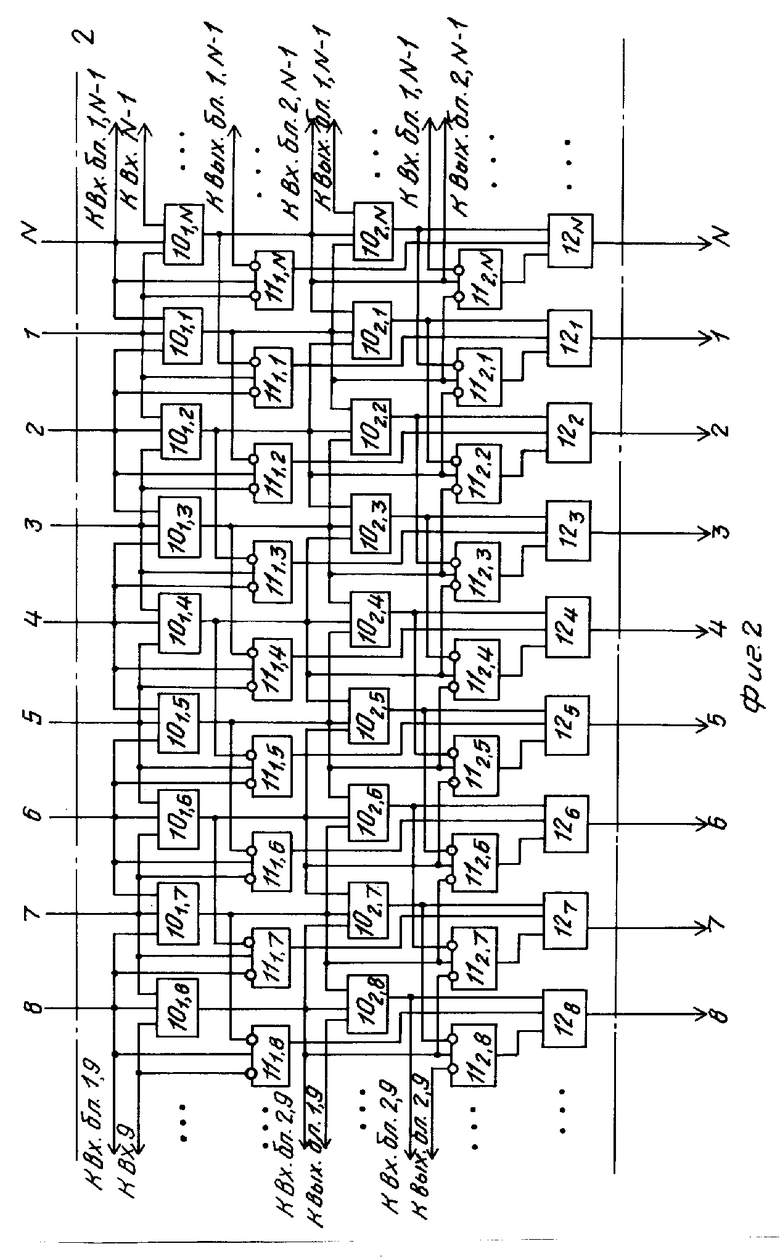
Блок 2 определения среднего из замкнутых датчиков касания руля (фиг. 2) приведен для случая, когда число одновременно срабатывающих датчиков касания L=5, а в общем случае он содержит i рядов по N трехвходовых элементов И 10i,j, где i =  1,
1, , j=
, j= , i рядов по N трехвходовых элементов 11i,j запрета и N элементов ИЛИ 12j, входы которых подключены к выходам соответствующих j-х элементов 11i,j запрета каждого i-го ряда и к выходам j-х элементов И 10i,j
, i рядов по N трехвходовых элементов 11i,j запрета и N элементов ИЛИ 12j, входы которых подключены к выходам соответствующих j-х элементов 11i,j запрета каждого i-го ряда и к выходам j-х элементов И 10i,j -го ряда, а выходы являются соответствующими j-ми выходами блока 2 определения среднего из замкнутых датчиков касания руля. Входы j-го трехвходового элемента И первого ряда 10 подключены соответственно к (j-1)-му, j-му и (j+1)-му входам блока 2 определения среднего из замкнутых датчиков касания руля, входы j-го трехвходового элемента И 10i,j каждого следующего i-го ряда (i=2,
-го ряда, а выходы являются соответствующими j-ми выходами блока 2 определения среднего из замкнутых датчиков касания руля. Входы j-го трехвходового элемента И первого ряда 10 подключены соответственно к (j-1)-му, j-му и (j+1)-му входам блока 2 определения среднего из замкнутых датчиков касания руля, входы j-го трехвходового элемента И 10i,j каждого следующего i-го ряда (i=2,  ) подключены соответственно к выходам (j+1)-го, j-го и (j-1)-го элементов И 10i,j предыдущего i-го ряда (i=1,
) подключены соответственно к выходам (j+1)-го, j-го и (j-1)-го элементов И 10i,j предыдущего i-го ряда (i=1,  ). Информационные входы каждого j-го трехвходового элемента 11i,jзапрета первого ряда подключены к j-му входу блока 2 определении среднего из замкнутых датчиков касания руля, первый и второй запрещающие входы j-го элемента 11i,j запрета первого ряда соединены соответственно с (j+1)-м входом блока 2 определения среднего из замкнутых датчиков касания руля и с выходом (j-1)-го трехвходового элемента И 101,j-1первого ряда. Информационные входы каждого j-го трехвходового элемента 11i,j запрета последующих рядов (i=2,
). Информационные входы каждого j-го трехвходового элемента 11i,jзапрета первого ряда подключены к j-му входу блока 2 определении среднего из замкнутых датчиков касания руля, первый и второй запрещающие входы j-го элемента 11i,j запрета первого ряда соединены соответственно с (j+1)-м входом блока 2 определения среднего из замкнутых датчиков касания руля и с выходом (j-1)-го трехвходового элемента И 101,j-1первого ряда. Информационные входы каждого j-го трехвходового элемента 11i,j запрета последующих рядов (i=2,  ) подключены к выходам j-го трехвходового элемента И (i-1)-го ряда, первый и второй запрещающие входы каждого j-го трехвходового элемента 11i,j запрета последующих рядов (i=2,
) подключены к выходам j-го трехвходового элемента И (i-1)-го ряда, первый и второй запрещающие входы каждого j-го трехвходового элемента 11i,j запрета последующих рядов (i=2,  ) подключены соответственно к выходам (j+1)-го трехвходового элемента И 10i,j (i-1)-го ряда и (j-1)-го элемента И 10i,ji-го ряда. Очевидно, что L - число нечетное, а из-за цикличности структуры построения блока 2 определения среднего из замкнутых датчиков касания руля индекс j-1 для значения j=1 равен числу N, а индекс j+1 при j=N равен числу 1.
) подключены соответственно к выходам (j+1)-го трехвходового элемента И 10i,j (i-1)-го ряда и (j-1)-го элемента И 10i,ji-го ряда. Очевидно, что L - число нечетное, а из-за цикличности структуры построения блока 2 определения среднего из замкнутых датчиков касания руля индекс j-1 для значения j=1 равен числу N, а индекс j+1 при j=N равен числу 1.
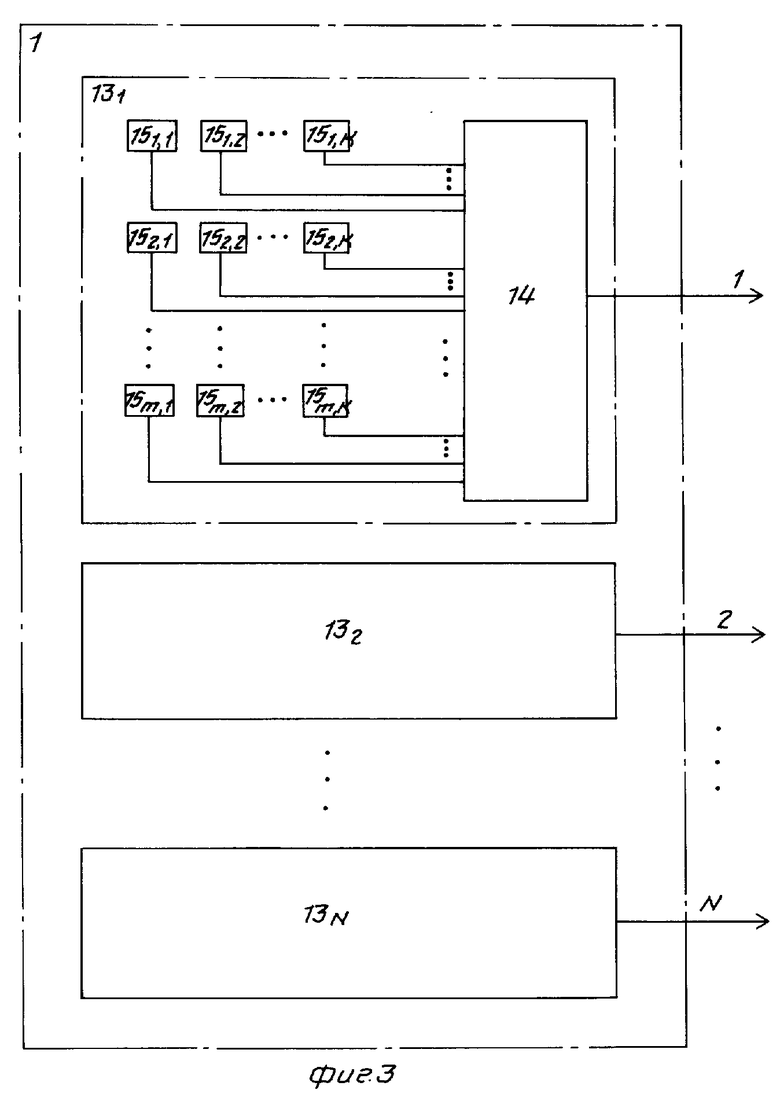
Блок 1 датчиков касания руля (фиг. 3) содержит N датчиков 13jкасания (j=  ), каждый из которых включает в себя многовходовый элемент ИЛИ14 и матрицу расположенных на поверхности обода рулевого колеса контактных датчиков 15p,r (p=
), каждый из которых включает в себя многовходовый элемент ИЛИ14 и матрицу расположенных на поверхности обода рулевого колеса контактных датчиков 15p,r (p= ; r=
; r= ), выходами подключенных к входам многовходового элемента ИЛИ14, выход которого является j-м выходом блока 1 датчиков касания руля.
), выходами подключенных к входам многовходового элемента ИЛИ14, выход которого является j-м выходом блока 1 датчиков касания руля.
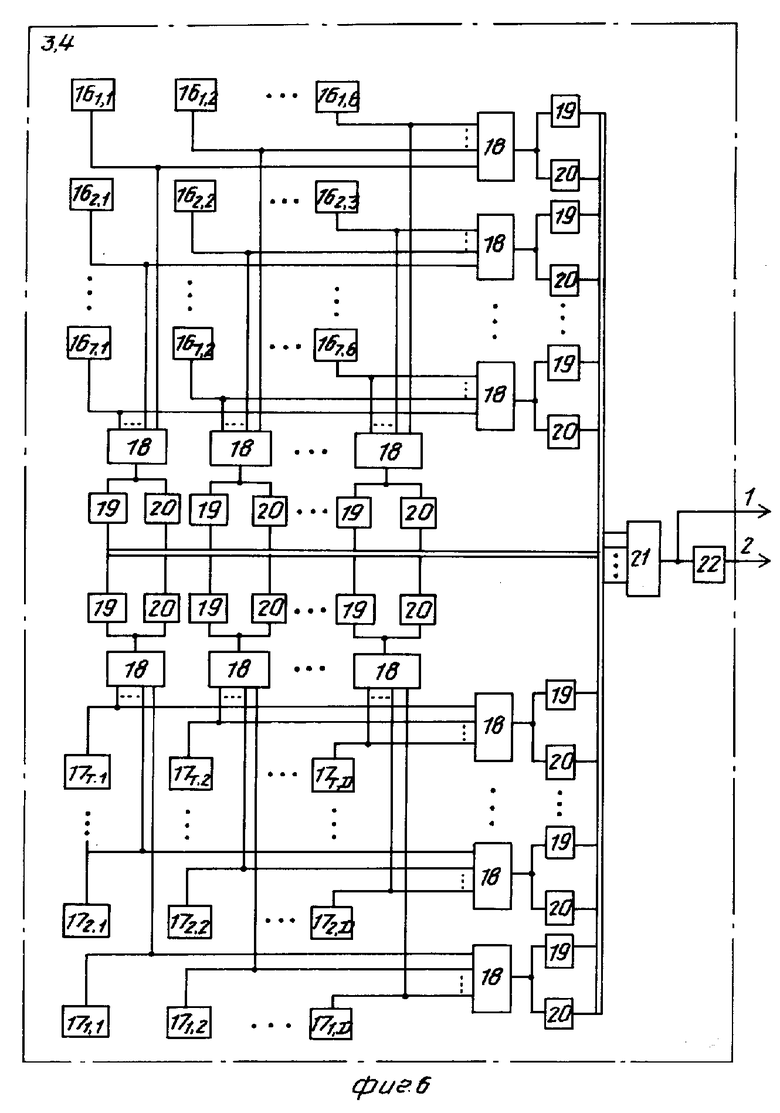
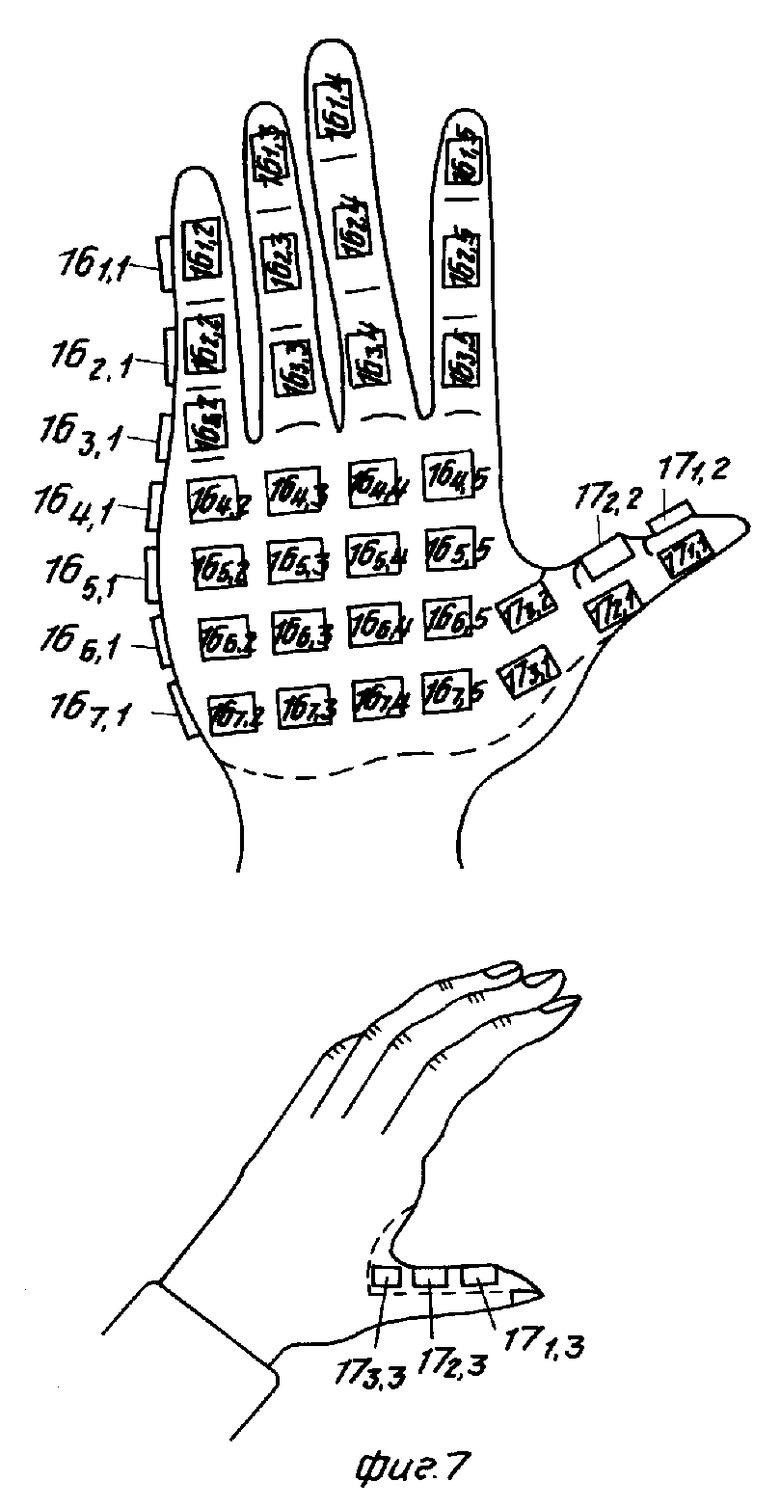
Каждый из датчиков 3 и 4 касания рук (фиг. 6) содержит матрицу (GxI) контактных датчиков 16μ,η кисти ( μ= ; η =
; η = ), расположенных на внутренней и реберной поверхностях кисти, и матрицу (DxT) контактных датчиков 17ϕ,Ψ большого пальца руки (ϕ =1,D; Ψ=1,Т), расположенных на внутренних и боковых поверхностях большого пальца, по суммарному числу столбцов и строк в обоих матрицах контактных датчиков первые элементы ИЛИ18, входы которых подключены к выходам контактных датчиков 16μ,η и 17ϕ,Ψ соответствующих строк или столбцов, по числу первых элементов ИЛИ 18 первые 19 и вторые 20 формирователи импульсов, входы каждой пары из которых объединены и подключены к выходу соответствующего элемента ИЛИ 18, последовательно соединенные второй элемент ИЛИ21 и элемент 22 задержки, причем выходы всех первых 19 и вторых 20 формирователей импульсов объединены в шину и подключены к входам второго элемента ИЛИ21, выход которого является первым выходом датчика 3 (4) касания руки, а выход элемента 22 задержки является вторым выходом датчика 3(4) касания руки.
), расположенных на внутренней и реберной поверхностях кисти, и матрицу (DxT) контактных датчиков 17ϕ,Ψ большого пальца руки (ϕ =1,D; Ψ=1,Т), расположенных на внутренних и боковых поверхностях большого пальца, по суммарному числу столбцов и строк в обоих матрицах контактных датчиков первые элементы ИЛИ18, входы которых подключены к выходам контактных датчиков 16μ,η и 17ϕ,Ψ соответствующих строк или столбцов, по числу первых элементов ИЛИ 18 первые 19 и вторые 20 формирователи импульсов, входы каждой пары из которых объединены и подключены к выходу соответствующего элемента ИЛИ 18, последовательно соединенные второй элемент ИЛИ21 и элемент 22 задержки, причем выходы всех первых 19 и вторых 20 формирователей импульсов объединены в шину и подключены к входам второго элемента ИЛИ21, выход которого является первым выходом датчика 3 (4) касания руки, а выход элемента 22 задержки является вторым выходом датчика 3(4) касания руки.
Устройство для ввода информации о положении рук водителя на ободе рулевого колеса работает следующим образом.
В исходном состоянии первый 5 и второй 6 регистры находятся в нулевом состоянии, а руки водителя не находятся на ободе рулевого колеса. При этом отсутствуют сигналы на выходах блока 1 датчиков касания руля и первого 3 и второго 4 датчиков касания рук. Вследствие этого в ЭВМ не поступают сигналы запроса на ввод информации от устройства.
При схвате или касании обода рулевого колеса одной из рук водителя (пусть это будет правая рука) замыкаются датчики блока 1 датчиков касания руля, на одном или нескольких расположенных подряд выходах которого формируются сигналы логической "1", общее количество которых не превышает числа L, соответствующего максимально возможной ширине SLтактильного отпечатка кисти руки на поверхности обода рулевого колеса. Каждый датчик касания блока 1 датчиков касания руля расположен на определенном участке окружности обода, поэтому замыкание нескольких из них несет пространственную информацию о зоне касания руки водителя. Предполагают, что правая рука находится в начальной зоне обода рулевого колеса и вызвала появление сигналов на первых трех выходах блока 1 датчиков касания руля (L=3).
Выходные сигналы блока 1 датчиков касания руля поступают на соответствующие входы блока 2 определения среднего из замкнутых датчиков касания руля, на одном из выходов которого (в нашем случае на втором) появляется сигнал логической "1", соответствующий середине зоны касания правой руки обода рулевого колеса. Отсутствие сигналов на выходах обнуленных первого 5 и второго 6 регистров поддерживает в открытом состоянии все элементы 7j (j=  ), запрета, поэтому сигнал с второго выхода блока 2 определения среднего из замкнутых датчиков касания руля через открытый элемент 72 запрета поступает на второй информационный вход первого регистра 5. При касании правой руки обода срабатывает первый датчик 3 касания руки, на первом выходе которого формируется импульс, поступающий на (N+1)-й вход сброса первого регистра 5, подтверждающий его нулевое состояние. Через время, достаточное для срабатывания блока 1 датчиков касания руля, блока 2 определения среднего из замкнутых датчиков касания руля и элемента 72 запрета, на втором выходе первого датчика 3 касания руки формируется импульс, поступающий на (N+2)-й стробирующий вход первого регистра 5 и осуществляющий тем самым запись информации, поступившей на его второй информационный вход. На выходе второго разряда первого регистра 5 появляется сигнал логической "1", который поступает на первый запрещающий вход второго элемента 72 запрета и запирает его для дальнейшего прохождения информации на вторые информационные входы первого 5 и второго 6 регистров. Состояние первого регистра 5 анализируется первым шифратором 8, на выходе которого формируется код текущего положения правой руки. Сигнал с второго выхода первого датчика 3 касания руки поступает в ЭВМ в качестве сигнала запроса на ввод информации, по которому ЭВМ считывает с первого информационного выхода устройства код текущего положения правой руки.
), запрета, поэтому сигнал с второго выхода блока 2 определения среднего из замкнутых датчиков касания руля через открытый элемент 72 запрета поступает на второй информационный вход первого регистра 5. При касании правой руки обода срабатывает первый датчик 3 касания руки, на первом выходе которого формируется импульс, поступающий на (N+1)-й вход сброса первого регистра 5, подтверждающий его нулевое состояние. Через время, достаточное для срабатывания блока 1 датчиков касания руля, блока 2 определения среднего из замкнутых датчиков касания руля и элемента 72 запрета, на втором выходе первого датчика 3 касания руки формируется импульс, поступающий на (N+2)-й стробирующий вход первого регистра 5 и осуществляющий тем самым запись информации, поступившей на его второй информационный вход. На выходе второго разряда первого регистра 5 появляется сигнал логической "1", который поступает на первый запрещающий вход второго элемента 72 запрета и запирает его для дальнейшего прохождения информации на вторые информационные входы первого 5 и второго 6 регистров. Состояние первого регистра 5 анализируется первым шифратором 8, на выходе которого формируется код текущего положения правой руки. Сигнал с второго выхода первого датчика 3 касания руки поступает в ЭВМ в качестве сигнала запроса на ввод информации, по которому ЭВМ считывает с первого информационного выхода устройства код текущего положения правой руки.
Аналогично вводится информация о текущем положении левой руки при касании или схвате ею обода рулевого колеса, причем занесение информации о середине ее тактильного отпечатка во второй регистр 6 осуществляется без искажения (т. е. только с одного выхода блока определения среднего из замкнутых датчиков касания), поскольку информация о положении правой руки заблокирована элементом 72 запрета и не накладывается на информацию о положении левой руки.
Сигналы на обоих выходах первого 3 и второго 4 датчиков касания рук формируются не только в момент касания рук водителя обода рулевого колеса, но также при снятии рук с обода и при любом изменении характера схвата, поскольку это может изменить ширину тактичного отпечатка и, следовательно, координаты его середины. В этих случаях сигнал с первых выходов первого 3 или второго 4 датчика касания рук обнуляет соответствующий регистр 5 или 6, а сигналы с вторых выходов первого 3 или второго 4 датчика касания рук осуществляют занесение в эти регистры измененной информации и организуют последующий ввод ее в ЭВМ.
Блок 2 определения среднего из замкнутых датчиков касания руля (фиг. 2) работает при условии, что количество одновременно сработавших датчиков касания не превышает числа L, соответствующего максимально возможной ширине SL тактильного отпечатка руки водителя на ободе рулевого колеса. При этом в приведенном варианте предполагается, что число L нечетное и равно пяти, а при срабатывании двух датчиков касания приоритет отдается входу блока 2 определения среднего из замкнутых датчиков касания руля, имеющему больший номер. Рассмотрим работу блока 2 определения среднего из замкнутых датчиков касания руля при появлении от одного до пяти сигналов срабатывания датчиков касания на его пяти первых входах.
Предполагают, что появился сигнал признака касания на третьем входе блока 2 определения среднего из замкнутых датчиков касания руля. При этом отсутствуют сигналы на остальных (в том числе и соседних) входах, поэтому отсутствуют сигналы совпадения на выходах всех трехвходовых элементов И 101,j первого ряда, в том числе и элемента И 101,2 (j= ). Вследствие этого отсутствуют сигналы на обоих входах запрета трехвходового элемента 111,3 запрета первого ряда, поэтому сигнал признака касания с третьего входа проходит через элемент 111,3 запрета и элемент ИЛИ 123 непосредственно только на третий выход блока 2 определения среднего из замкнутых датчиков касания руля.
). Вследствие этого отсутствуют сигналы на обоих входах запрета трехвходового элемента 111,3 запрета первого ряда, поэтому сигнал признака касания с третьего входа проходит через элемент 111,3 запрета и элемент ИЛИ 123 непосредственно только на третий выход блока 2 определения среднего из замкнутых датчиков касания руля.
Предполагают, что сигналы признака касания появились одновременно на третьем и четвертом входах блока 2 определения среднего из замкнутых датчиков касания руля. При этом также отсутствуют сигналы на остальных входах блока 2 и сигналы совпадения на выходах всех трехвходовых элементов И101,j(j=  ) и, следовательно, на вторых запрещающих входах всех трехвходовых элементов 111,j запрета первого ряда, в том числе и элемента 111,3 запрета. Однако на первый запрещающий вход этого элемента 111,3 запрета поступает сигнал признака касания с четвертого входа блока 2 определения среднего из замкнутых датчиков касания руля, поэтому сигнал признака касания с третьего входа данного блока не проходит через элемент 111,3 запрета и элемент ИЛИ 123 на его третий выход. Сигнал признака касания с четвертого входа блока 2 определения среднего из замкнутых датчиков касания руля через открытый элемент 111,4 запрета и элемент ИЛИ 124 проходит на его четвертый выход в качестве среднего из двух замкнутых датчиков касания.
) и, следовательно, на вторых запрещающих входах всех трехвходовых элементов 111,j запрета первого ряда, в том числе и элемента 111,3 запрета. Однако на первый запрещающий вход этого элемента 111,3 запрета поступает сигнал признака касания с четвертого входа блока 2 определения среднего из замкнутых датчиков касания руля, поэтому сигнал признака касания с третьего входа данного блока не проходит через элемент 111,3 запрета и элемент ИЛИ 123 на его третий выход. Сигнал признака касания с четвертого входа блока 2 определения среднего из замкнутых датчиков касания руля через открытый элемент 111,4 запрета и элемент ИЛИ 124 проходит на его четвертый выход в качестве среднего из двух замкнутых датчиков касания.
Предполагают, что сигналы признака касания появились одновременно на втором, третьем и четвертом входах блока 2 определения среднего из замкнутых датчиков касания руля. При этом сигнал совпадения формируется на выходе только одного из трехвходовых элементов И 101,j (j= ) первого ряда, а именно элемент И 101,3. Этот сигнал поступает на второй запрещающий вход элемента 111,4 запрета, предотвращая прохождение через него сигнала с четвертого входа блока 2 определения среднего из замкнутых датчиков касания руля.
) первого ряда, а именно элемент И 101,3. Этот сигнал поступает на второй запрещающий вход элемента 111,4 запрета, предотвращая прохождение через него сигнала с четвертого входа блока 2 определения среднего из замкнутых датчиков касания руля.
Сигнал признака касания с третьего входа блока 2 определения среднего из замкнутых датчиков касания руля поступает также на первый запрещающий вход элемента 101,2 запрета первого ряда, предотвращая прохождения через него на выход сигнала признака касания с второго входа блока 2 определения среднего из замкнутых датчиков касания руля.
Выходной сигнал элемента И 101,3 поступает также на информационный вход элемента 112,3 запрета второго ряда, на запрещающих входах которого сигналы отсутствуют, поскольку нет сигнала совпадение на выходе элемента И 101,4 первого ряда и на выходах всех элементов и 102,j второго ряда. Поэтому на выходе элемента 112,3 запрета появляется сигнал, который через элемент ИЛИ 123 поступает на третий выход блока 2 определения среднего из замкнутых датчиков касания руля в качестве признака среднего из трех указанных замкнутых датчиков касания.
Предполагают, что на первые четыре входа блока 2 определения среднего из замкнутых датчиков касания руля поступили сигналы признака касания. При этом четвертый, третий и второй входные сигналы поступают на первые запрещающие входы элементов 111,3, 111,2 и 111,1 запрета соответственно, предотвpащая прохождение через них сигналов с третьего, второго и первого входов блока 2 определения среднего из замкнутых датчиков касания руля. Сигналы совпадения формируются только на выходах элементов И 101,3 и 101,2 первого ряда, которые поступают на информационные входы соответственно элементов 112,3 и 112,2 запрета второго ряда. Выходной сигнал элемента И 101,3, поступив на второй запрещающий вход элемента 111,4 запрета, предотвращает прохождение через него четвертого входного сигнала. На вторых запрещающих входах элементов 112,3 и 112,2 запрета сигналы отсутствуют, поскольку на выходах всех элементов И 102,j (j= ) отсутствуют сигналы совпадения. Отсутствует также выходной сигнал элемента И 101,4 на первом запрещающем входе элемента 112,3 запрета, однако на первый запрещающий вход элемента 112,2запрета поступает выходной сигнал элемента И 1,101,3 предотвращающий поступление на его выход и, следовательно, на второй выход блока 2 определения среднего из замкнутых датчиков касания руля выходного сигнала элемента И 101,2. Выходной сигнал элемента И 101,3 через открытый элемент 112,3 запрета и элемент ИЛИ 123 поступает на третий выход блока 2 определения среднего из замкнутых датчиков касания руля в качестве сигнала признака среднего из четырех первых замкнутых датчиков касания.
) отсутствуют сигналы совпадения. Отсутствует также выходной сигнал элемента И 101,4 на первом запрещающем входе элемента 112,3 запрета, однако на первый запрещающий вход элемента 112,2запрета поступает выходной сигнал элемента И 1,101,3 предотвращающий поступление на его выход и, следовательно, на второй выход блока 2 определения среднего из замкнутых датчиков касания руля выходного сигнала элемента И 101,2. Выходной сигнал элемента И 101,3 через открытый элемент 112,3 запрета и элемент ИЛИ 123 поступает на третий выход блока 2 определения среднего из замкнутых датчиков касания руля в качестве сигнала признака среднего из четырех первых замкнутых датчиков касания.
Рассмотрим случай, когда замкнуты первые пять датчиков касания. В этом случае второй-пятый входные сигналы блока 2 определения среднего из замкнутых датчиков касания руля поступают соответственно на первые запрещающие входы элементов 111,1-111,4 запрета, предотвращая прохождение через них соответствующих входных сигналов. Сигналы совпадения формируются на выходах элементов И 101,2, 101,3 и 101,4, причем выходной сигнал элемента И 101,4, поступив на второй запрещающий вход элемента 111,5 запрета, предотвращает прохождение через него пятого входного сигнала. Из элементов И 102,j (j=  ) второго ряда сигнал совпадения формируется только на выходе элемента 102,3, который и проходит через элемент или 123 на третий выход блока 2 определения среднего из замкнутых датчиков касания руля в качестве сигнала признака среднего из пяти сработавших датчиков касания. Выходные сигналы совпадения элементов И 101,4 и 101,2 через соответствующие элементы 112,4 и 112,2 запрета не проходят на выход блока 2 определения среднего из замкнутых датчиков касания руля, поскольку первый из них заперт выходным сигналом элемента И 102,3, а второй - выходным сигналом элемента И 101,3.
) второго ряда сигнал совпадения формируется только на выходе элемента 102,3, который и проходит через элемент или 123 на третий выход блока 2 определения среднего из замкнутых датчиков касания руля в качестве сигнала признака среднего из пяти сработавших датчиков касания. Выходные сигналы совпадения элементов И 101,4 и 101,2 через соответствующие элементы 112,4 и 112,2 запрета не проходят на выход блока 2 определения среднего из замкнутых датчиков касания руля, поскольку первый из них заперт выходным сигналом элемента И 102,3, а второй - выходным сигналом элемента И 101,3.
Таким образом, блок 2 определения среднего из замкнутых датчиков касания руля при поступлении на его входы от одного до пяти следующих подряд сигналов признака касания формирует на своем выходе только один сигнал, являющийся средним из входных. Это справедливо для любой группы из от одного до пяти датчиков касания, отстоящих друг от друга по поверхности обода рулевого колеса на расстоянии, соответствующем одному датчику касания. Так, для последнего примера, когда одной рукой водителя замкнуты первые пять датчиков касания и на третьем выходе блока 2 определения среднего из замкнутых датчиков касания руля сформирован один сигнал признака среднего, если дополнительно сработают с седьмого по одиннадцатый датчики касания, то на одном из седьмого по одиннадцатый выходов блока 2 определения среднего из замкнутых датчиков касания руля сформирован еще один сигнал признака среднего, соответствующий данной группе датчиков касания и ширине тактильного отпечатка второй руки водителя.
В простейшем варианте технической реализации блока 1 датчиков касания руля (фиг. 3) при касании руки водителя одного из матрицы (mxk) расположенных на поверхности обода рулевого колеса контактных датчиков 15p,r (p= , r=
, r=  ) на выходе последнего формируется сигнал, который через элемент ИЛИ 14 поступает на выход соответствующего датчика 13jкасания (j=
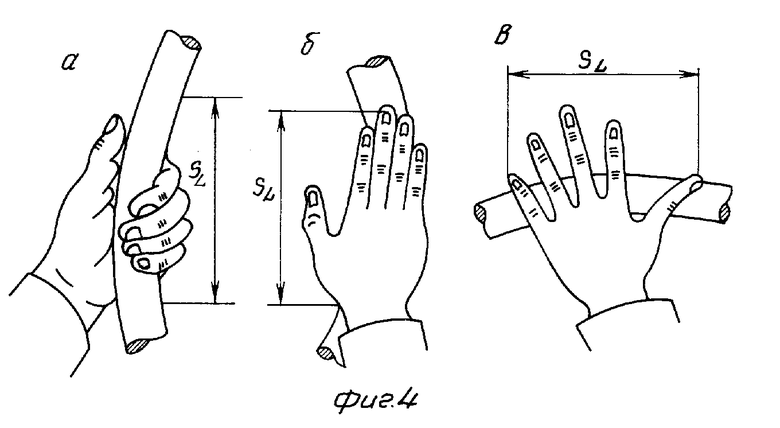
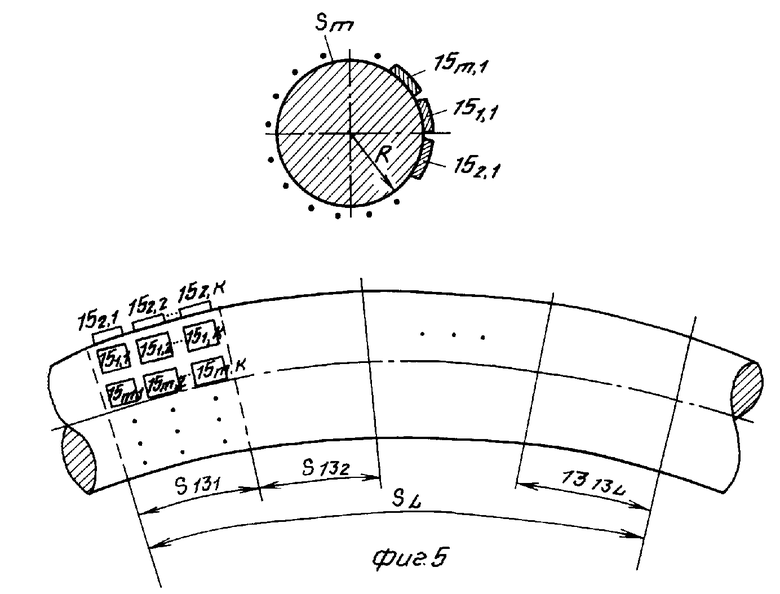
) на выходе последнего формируется сигнал, который через элемент ИЛИ 14 поступает на выход соответствующего датчика 13jкасания (j= ) в качестве признака касания. Число одновременно сработавших датчиков 13j касания зависит от ширины тактильного отпечатка руки на поверхности обода рулевого колеса, а достоверность срабатывания - от числа контактных датчиков 15p,r и расстояния между ними. На фиг. 4 приведены примеры расположения рук водителя на ободе рулевого колеса, характеризующиеся наибольшей шириной SL тактильного отпечатка, которая обычно не превышает 20 см. На фиг. 5 приведен пример расположения контактных датчиков 15р,r (p=
) в качестве признака касания. Число одновременно сработавших датчиков 13j касания зависит от ширины тактильного отпечатка руки на поверхности обода рулевого колеса, а достоверность срабатывания - от числа контактных датчиков 15p,r и расстояния между ними. На фиг. 4 приведены примеры расположения рук водителя на ободе рулевого колеса, характеризующиеся наибольшей шириной SL тактильного отпечатка, которая обычно не превышает 20 см. На фиг. 5 приведен пример расположения контактных датчиков 15р,r (p= ; r=
; r= ) на поверхности обода рулевого колеса для каждого датчика 13j касания (j=
) на поверхности обода рулевого колеса для каждого датчика 13j касания (j= ), занимающего поверхность обода шириной S13j и длиной Sm=2 π R.
), занимающего поверхность обода шириной S13j и длиной Sm=2 π R.
Ширина S13j поверхности обода рулевого колеса, занимаемая контактными датчиками каждого датчика касания, определяется требуемой точностью определения середины тактильного отпечатка руки водителя на поверхности обода рулевого колеса, а также необходимостью обеспечения формирования непрерывной последовательности сигналов признака касания. Например, если в тренажере транспортного средства допустимым является схват открытой кистью руки приведенного на фиг. 4 в типа, то удовлетворительные результаты дает значение S13j= 40 мм при расположении контактных датчиков 15р.r с шагом 10 мм, что соответствует числу L датчиков касания, определяемых максимальной шириной SL= 200 мм тактильного отпечатка, равному пяти (L=5). Это обеспечивает определение положения руки водителя на ободе рулевого колеса с точностью до 1/3 ширины нормального схвата закрытой кистью (когда большой палец находится с внутренней стороны обода рулевого колеса).
Датчик 3(4) касания руки водителя (фиг. 6) работает следующим образом. При касании руки водителя поверхности обода рулевого колеса внутренней частью или ребром кисти замыкаются один или несколько контактных датчиков 16μ,η ( μ=  ; η=
; η=  ), сигналы с выходов которых поступают одновременно на входы соответствующих элементов ИЛИ 18 столбцов и строк контактной матрицы. Выходные сигналы элементов ИЛИ18 поступают на входы идентичных по построению первых 19 и вторых 20 формирователей импульсов, отличающихся тем, что первые формирователи 19 импульсов формируют импульсы при появлении сигнала на выходе элемента ИЛИ18 (при замыкании контактных датчиков 16μ,η), а вторые формирователи 20 импульсов формируют импульсы при исчезновении сигнала на выходе элемента ИЛИ18 (при размыкании всех контактных датчиков 16μ,ηсоответствующей строки или столбца контактной матрицы). Вследствие этого при первоначальном касании руки водителя поверхности обода рулевого колеса выходные сигналы первых формирователей 19 импульсов, соответствующих строкам и столбцам с замыкающимися контактными датчиками 16μ,η, поступают через второй элемент ИЛИ21 на первый выход датчика 3(4) касания руки в качестве сигнала сброса первого 5 (второго 6) регистра, а затем через элемент 22 задержки на второй выход датчика 3(4) касания руки в качестве сигнала стробирования занесения информации в первый 5 (второй 6) регистр. Если при изменении характера схвата руки происходит замыкания контактных датчиков 16μ,η каких-нибудь отличных от первоначально сработавших строк или столбцов (что свидетельствует о возможном изменении ширины тактильного отпечатка), то процесс формирования выходных сигналов датчика 3 (4) касания руки идентичен описанному и обеспечивает занесение измененной информации в соответствующий регистр 5 или 6.
), сигналы с выходов которых поступают одновременно на входы соответствующих элементов ИЛИ 18 столбцов и строк контактной матрицы. Выходные сигналы элементов ИЛИ18 поступают на входы идентичных по построению первых 19 и вторых 20 формирователей импульсов, отличающихся тем, что первые формирователи 19 импульсов формируют импульсы при появлении сигнала на выходе элемента ИЛИ18 (при замыкании контактных датчиков 16μ,η), а вторые формирователи 20 импульсов формируют импульсы при исчезновении сигнала на выходе элемента ИЛИ18 (при размыкании всех контактных датчиков 16μ,ηсоответствующей строки или столбца контактной матрицы). Вследствие этого при первоначальном касании руки водителя поверхности обода рулевого колеса выходные сигналы первых формирователей 19 импульсов, соответствующих строкам и столбцам с замыкающимися контактными датчиками 16μ,η, поступают через второй элемент ИЛИ21 на первый выход датчика 3(4) касания руки в качестве сигнала сброса первого 5 (второго 6) регистра, а затем через элемент 22 задержки на второй выход датчика 3(4) касания руки в качестве сигнала стробирования занесения информации в первый 5 (второй 6) регистр. Если при изменении характера схвата руки происходит замыкания контактных датчиков 16μ,η каких-нибудь отличных от первоначально сработавших строк или столбцов (что свидетельствует о возможном изменении ширины тактильного отпечатка), то процесс формирования выходных сигналов датчика 3 (4) касания руки идентичен описанному и обеспечивает занесение измененной информации в соответствующий регистр 5 или 6.
При размыкании всех контактных датчиков 16μ,η ранее сработавших строки и/или столбца, что также свидетельствует о возможном изменении ширины тактильного отпечатка, исчезновение сигнала на выходе соответствующего элемента ИЛИ18 вызывает формирование импульса на выходе второго формирователя 20 импульсов, что, в свою очередь, через второй элемент ИЛИ21 вызывает формирование сигналов на обоих выходах датчика 3 (4) касания руки.
Аналогично работает датчик 3(4) касания руки при касании руки водителя обода рулевого колеса внутренней или боковыми поверхностями большого пальца (при этом срабатывают контактные датчики большого пальца 17ϕ,Ψ (ϕ =  ; Ψ =
; Ψ =  ), а также при одновременном касании руки водителя обода рулевого колеса внутренней поверхностью кисти и большим пальцем руки (при этом срабатывают контактные датчики 16μ,η и 17ϕ,Ψ)
), а также при одновременном касании руки водителя обода рулевого колеса внутренней поверхностью кисти и большим пальцем руки (при этом срабатывают контактные датчики 16μ,η и 17ϕ,Ψ)
.
Очевидно, что при размыкании всех контактных датчиков 16μ,η и 17ϕ,Ψ, свидетельствующем о прекращении контакта руки водителя с ободом рулевого колеса, также формируются сигналы на обоих выходах датчика 3 (4) касания руки, обеспечивающие занесение нулевого кода положения руки водителя в первый 5 (второй 6) регистр и дальнейший ввод его в ЭВМ.
Вариант расположения контактных датчиков на контактной поверхности кисти руки водителя иллюстрируется фиг. 7, из которой видно, что матрица контактных датчиков 16μ,η внутренней и реберной поверхности кисти имеет размерность 7Х5 (I=7, G=5), а матрица контактных датчиков 17ϕ,Ψбольшого пальца руки имеет размерность 3х3 (D=3, Т=3). Такое размещение контактных датчиков 16μ,η и 17ϕ,Ψ соответствует строению руки человека (большинство контактных датчиков размещено на фалангах пальцев), а расстояние между ними существенно меньше ширины поверхности обода рулевого колеса S13j=40 мм, занимаемой одним датчиком 13j касания руля, что обеспечивает достоверность ввода информации в ЭВМ о положении рук водителя на ободе рулевого колеса при всех изменениях линейных размеров тактильного отпечатка руки.
Таким образом, введение в предложенное устройство для ввода информации новых блоков с указанными связями обеспечивает ввод данных в ЭВМ о положении рук водителя на ободе рулевого колеса.
Предложенное устройство легко реализуется при построении элементов 7j запрета (j= ) на базе элементов К555ΛА4 и инверторов К555ЛН1, первого 5 и второго 6 регистров на базе микросхем К555ТМ8 и первого 8 и второго 9 шифраторов на базе микросхем КМ555ИВ1. Блок 1 датчиков касания руля и первый 3 и второй 4 датчики касания рук легко реализуются при использовании в качестве контактных датчиков 15р.r, 16μ,η и 17ϕ,Ψмикропереключателей типа ПКН-125 и при построении элементов ИЛИ 14, 18 и 21 на базе микросхем К555ЛА2 и К555ЛА4, а первых 19 и вторых 20 формирователей импульсов и элемента 22 задержки на базе микросхем К555АГ3. Блок 2 определения среднего из замкнутых датчиков касания руля легко реализуется в приведенном варианте построения на базе трехвходовых элементов И-НЕ, входящих в состав микросхем К555ЛА4, с применением для инвертирования сигналов микросхем типа К555ЛН1.
) на базе элементов К555ΛА4 и инверторов К555ЛН1, первого 5 и второго 6 регистров на базе микросхем К555ТМ8 и первого 8 и второго 9 шифраторов на базе микросхем КМ555ИВ1. Блок 1 датчиков касания руля и первый 3 и второй 4 датчики касания рук легко реализуются при использовании в качестве контактных датчиков 15р.r, 16μ,η и 17ϕ,Ψмикропереключателей типа ПКН-125 и при построении элементов ИЛИ 14, 18 и 21 на базе микросхем К555ЛА2 и К555ЛА4, а первых 19 и вторых 20 формирователей импульсов и элемента 22 задержки на базе микросхем К555АГ3. Блок 2 определения среднего из замкнутых датчиков касания руля легко реализуется в приведенном варианте построения на базе трехвходовых элементов И-НЕ, входящих в состав микросхем К555ЛА4, с применением для инвертирования сигналов микросхем типа К555ЛН1.
Контактные датчики 15p.r руля могут крепиться на поверхности рулевого колеса путем наклеивания с последующим покрытием эластичным тонким кожухом (из кожи или кожезаменителя). Контактные датчики 16μ,η и 17ϕ,Ψ датчиков 3 и 4 касания рук могут крепиться с помощью двухслойных перчаток, между слоями которых монтируются собственно контактные датчики 16μ,η и 17ϕ,Ψ , а также соединяющие их провода.
Устройство предполагается использовать в комплексном динамическом автомобильном тренажере для контроля пространственно-временной координации движения рук водителя при рулении и косвенной оценки качества управления движением.
В настоящее время создается макет автомобильного тренажера в части обучения рулению на базе микроЭВМ IBM РС-ХТ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОСТАНОВКИАВТОМОБИЛЯ | 1969 |
|
SU246330A1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА СОСТОЯНИЕМ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2563924C1 |
| Устройство для ввода информации | 1987 |
|
SU1434421A1 |
| Электронное игровое устройство | 1982 |
|
SU1074552A1 |
| СПОСОБ КОНТРОЛЯ СУММАРНОГО ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2266530C1 |
| Устройство для оценки мастерства вождения транспортных средств | 1989 |
|
SU1622889A1 |
| СПОСОБ КОНТРОЛЯ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2129712C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА СОСТОЯНИЕМ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2214931C2 |
| УСТРОЙСТВО, ИНДИЦИРУЮЩЕЕ УГОЛ ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ И КАЧЕСТВО КОНТАКТА ВОДИТЕЛЯ С РУЛЕВЫМ КОЛЕСОМ | 2003 |
|
RU2332321C2 |
| Устройство для автоматического счета подвижных объектов | 1975 |
|
SU658023A1 |
Изобретение относится к вычислительной технике и предназначено для ввода информации в ЭВМ о положении рук водителя на ободе рулевого колеса в тренажерах транспортных средств. Целью изобретения является возможность оперативного ввода информации в ЭВМ за счет одновременной обработки сигналов от коммутационных элементов (датчиков), расположенных на ободе рулевого колеса. Устройство содержит блок 1 датчиков касания руля, блок 2 определения среднего из замкнутых датчиков касания руля, первый 3 и второй 4 датчики касания рук водителя, регистры 5, 6, элементы 7 запрета, шифраторы 8, 9. 7 ил.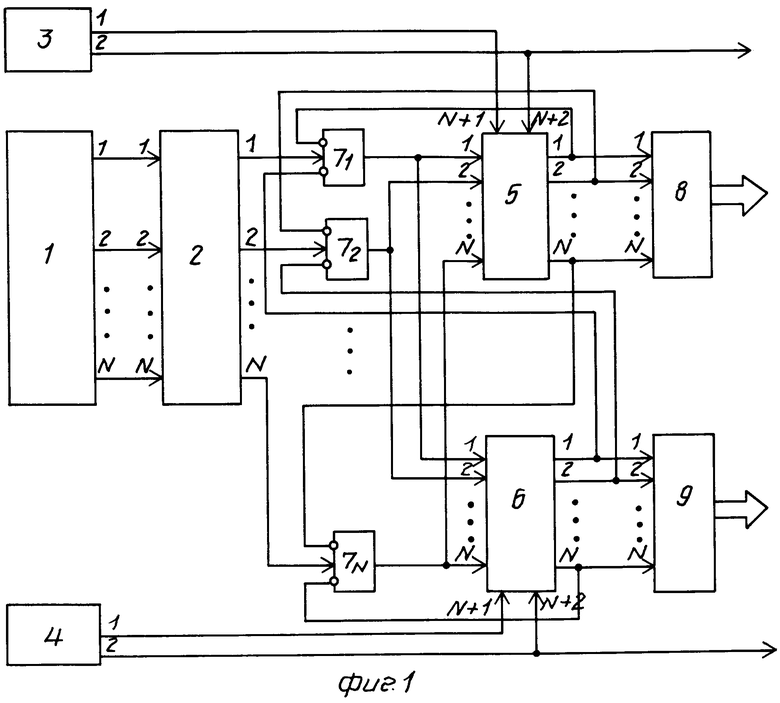
УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ, содержащее блок датчиков касания руля, первый и второй регистры, отличающееся тем, что в устройство введены первый и второй датчики касания рук водителя, блок определения среднего из замкнутых датчиков касания руля, элементы запрета, первый и второй шифраторы, выходы которых являются информационными выходами устройства, входы шифраторов подключены к выходам соответствующих регистров, выходы блока датчиков касания руля соединены с входами блока определения среднего из замкнутых датчиков касания руля, выходы которого подключены к информационным входам соответствующих элементов запрета, выходы которых соединены с соответствующими информационными входами первого и второго регистров, причем j-е выходы первого регистра (j =  , где N - разрядность регистров соединены с первыми запрещающими входами одноименных элементов запрета, j-е выходы второго регистра соединены с вторыми запрещающими входами одноименных элементов запрета, первые выходы первого и второго датчиков касания рук водителя соединены с входами сброса соответственно первого и второго регистров, вторые выходы первого и второго датчиков касания рук водителя соединены с входами стробирования соответственно первого и второго регистров и являются первым и вторым выходами запроса ввода информации устройства.
, где N - разрядность регистров соединены с первыми запрещающими входами одноименных элементов запрета, j-е выходы второго регистра соединены с вторыми запрещающими входами одноименных элементов запрета, первые выходы первого и второго датчиков касания рук водителя соединены с входами сброса соответственно первого и второго регистров, вторые выходы первого и второго датчиков касания рук водителя соединены с входами стробирования соответственно первого и второго регистров и являются первым и вторым выходами запроса ввода информации устройства.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для ввода информации | 1987 |
|
SU1501023A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
