Изобретение относится к электротехнике и может быть использовано в инверторах, предназначенных для частотно-регулируемого электропривода, а также в источниках электропитания, к которым предъявляются повышенные требования по качеству выходной энергии.
Известен способ управления следящим инвертором, заключающийся в выделении сигнала ошибки выходного параметра инвертора от заданного значения, непрерывном интегрировании сигнала ошибки, сравнении интеграла сигнала ошибки с разнополярными уровнями сравнения и управлении силовыми ключами инвертора в зависимости от результатов сравнения [1].
Недостатком известного способа является высокая относительная погрешность формирования выходного параметра инвертора, особенно в области малых значений параметра, обусловленная постоянством величины пульсации.
Наиболее близким по технической сущности и достигаемым результатам является способ управления следящим автономным инвертором, заключающийся в том, что формируют сигнал задания, формируют сигнал, пропорциональный мгновенному значению выходного параметра инвертора, непрерывно сравнивают его с сигналом задания, в результате сравнения формируют сигнал ошибки, непрерывно интегрируют его, сравнивают интеграл сигнала ошибки с двумя равными по величине разнополярными уровнями переключения и в моменты их равенства переключают ключевые элементы инвертора, в котором уровни переключения изменяют в функции сигнала задания [2].
При использовании указанного известного способа уменьшается относительная погрешность формирования мгновенного значения выходного параметра, однако способ является сложным в реализации.
Целью изобретения является упрощение способа.
Цель достигается тем, что в известном способе управления следящим автономным инвертором, заключающемся в том, что формируют сигнал задания, формируют сигнал, пропорциональный мгновенному значению выходного параметра инвертора, непрерывно сравнивают его с сигналом задания, в результате сравнения формируют сигнал ошибки, непрерывно интегрируют сигнал ошибки, сравнивают интеграл сигнала ошибки с двумя равными по величине разнополярными уровнями переключения и в моменты их равенства переключают ключевые элементы инвертора, в процессе непрерывного интегрирования постоянную времени интегрирования увеличивают прямо пропорционально модулю сигнала задания.
Такими техническими особенностями не обладает ни один из известных способов аналогичного назначения, что соответствует критерию "существенные отличия". Достижение цели соответствует критерию "положительный эффект", а наличие отличительных признаков от прототипа соответствует критерию "новизна".
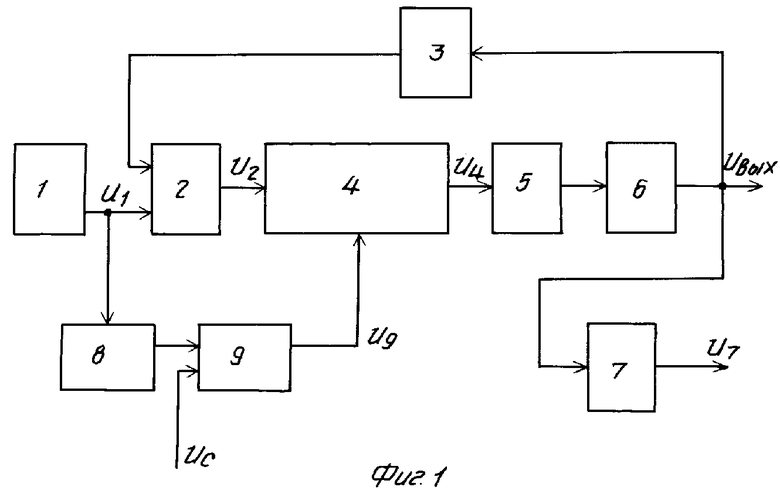
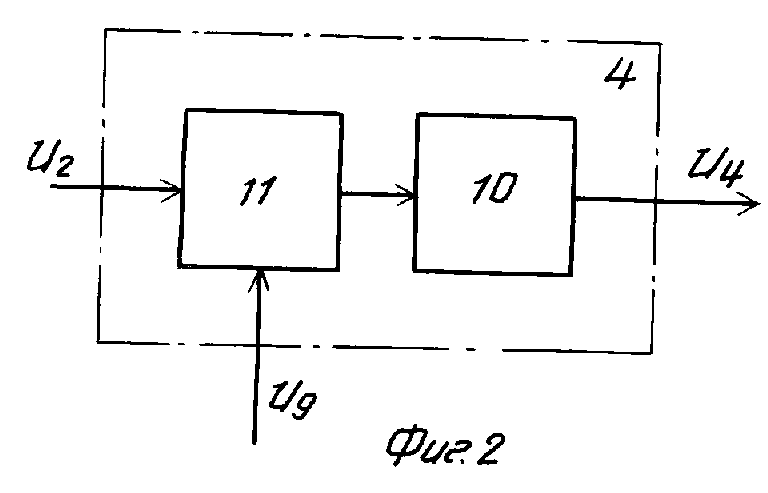
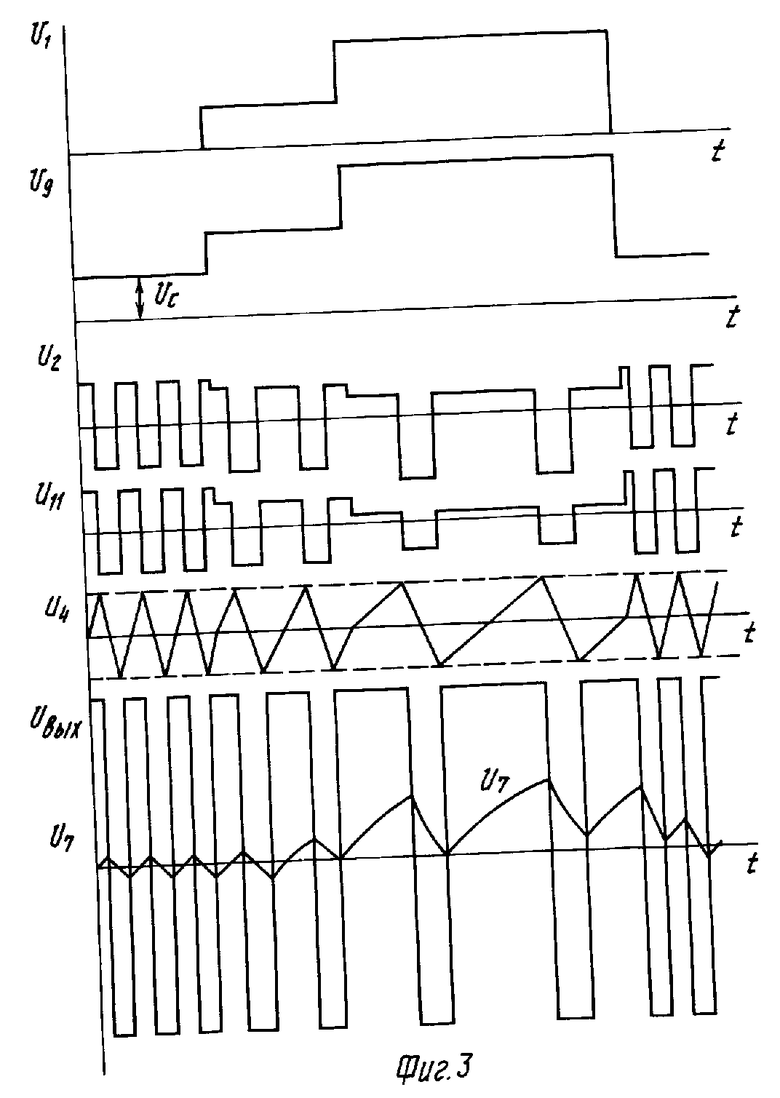
На фиг. 1 изображена функциональная схема одного из вариантов системы управления, реализующей предложенный способ; на фиг. 2 - вариант построения управляемого интегратора; на фиг. 3 - временные диаграммы, иллюстрирующие существо предложенного способа.
Инвертор (фиг. 1), реализующий предложенный способ, содержит задающее устройство 1, узел 2 выделения ошибки, узел 3 выделения сигнала выходного параметра, управляемый интегратор 4, компаратор 5, инвертор 6 с выходным фильтром 7, узел 8 выделения модуля и аналоговый сумматор 9. Один из входов узла 2 выделения ошибки подключен к выходу задающего устройства 1, другой вход через узел 3 выделения сигнала выходного параметра - к выходу инвертора 6, а выход - к входу управляемого интегратора 4, выход которого подключен к входу компаратора 5, выход которого в свою очередь соединен с управляющим входом инвертора 6. Вход устройства 8 выделения модуля подключен к выходу задающего устройства 1, выход - к одному из входов аналогового сумматора 9, на второй вход которого подается напряжение смещения Uс, а выход связан с входом управляемого интегратора 4. Нагрузка инвертора (не показана) может быть подключена к выходу инвертора непосредственно, либо через сглаживающий фильтр 7.
На фиг. 2 показан один из вариантов выполнения управляемого интегратора 4. Он состоит из интегратора 10 с фиксированной постоянной времени интегрирования и делительного устройства 11, выход которого подключен к входу интегратора 10. Вход делительного устройства 11 является входом управляемого интегратора 4, а вход деления является входом управления управляемого интегратора 4. При таком соединении, изменяя напряжение на входе деления делительного устройства 11, можно регулировать эквивалентное значение постоянной времени интегрирования управляемого интегратора 4.
Способ реализуется следующим образом. Задающий сигнал U1 подают на один из входов узла 2 выделения сигнала ошибки, где сравнивают с сигналом, пропорциональным мгновенному значению выходного параметра, в данном случае напряжения, выделяемого узлом 3. Полученный при этом сигнал ошибки U2 подают на вход управляемого интегратора 4, где производят непрерывное интегрирование сигнала ошибки. Сигнал, пропорциональный интегралу сигнала ошибки, подают на вход компаратора 5, где сравнивают его с двумя равными по величине разнополярными уровнями переключения. При равенстве интеграла сигнала ошибки уровням переключения вырабатывают с помощью компаратора 5 сигнал переключения ключевых элементов инвертора 6.
Под воздействием сигнала, поступающего с выхода компаратора 5, инвертор 6 изменяет свое состояние и знак выходного напряжения меняется на противоположный. Это приводит к изменению знака и величины сигнала ошибки на выходе узла 2 выделения ошибки U2 (фиг. 3). Управляемый интегратор 4 воспринимает сигнал ошибки, в результате чего сигнал на выходе интегратора U4 начинает изменяться с противоположной по знаку производной. Далее процессы повторяются.
Одновременно задающий сигнал U1 подают на вход узла 8 выделения модуля, где выделяют его абсолютное значение и суммируют полученное значение с напряжением смещения Uс, получая при этом корректирующий сигнал U9, который используют для изменения постоянной времени интегрирования интегратора 4, которая в результате этого изменяется одновременно с изменением мгновенного значения модуля напряжения задания.
Использование изменяемой постоянной времени интегрирования позволяет повысить точность формирования выходного параметра, в данном случае напряжения инвертора за счет уменьшения относительной погрешности формирования выходного параметра. Это иллюстрируется диаграммой на фиг. 3, откуда видно, что величина пульсаций выходного напряжения U7 инвертора, выделяемого сглаживающим фильтром 7, переменна и с уменьшением сигнала задания, что соответствует меньшим уровням среднего значения выходного напряжения, уменьшается, стабилизируя таким образом погрешность формирования напряжения.
Напряжение смещения Uс, подаваемое на вход сумматора 9, определяет минимальное значение постоянной времени интегрирования управляемого интегратора 4 и соответственно обуславливает максимальную частоту переключения ключевых элементов инвертора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2046528C1 |
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ МНОГОЯЧЕЙКОВЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2026601C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2025879C1 |
| СПОСОБ СЛЕДЯЩЕГО ДИСКРЕТНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 1991 |
|
RU2025763C1 |
| Способ управления автономным инвертором | 1978 |
|
SU892651A1 |
| Способ управления автономным инвертором напряжения | 1986 |
|
SU1367115A1 |
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1993 |
|
RU2093949C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
| Способ управления импульсным преобразователем напряжения | 1989 |
|
SU1746369A1 |
| Способ регулирования частоты резонансного инвертора | 1988 |
|
SU1690133A1 |
Использование: преобразование постоянного напряжения в переменное напряжение заданной формы для систем вторичного электропитания, электропривода и автоматики. Сущность изобретения: сигнал, пропорциональный мгновенному значению выходного параметра инвертора, сравнивают с сигналом задания в компараторе и далее интегрируют в интеграторе. На выходе интегратора сигнал по достижении порогового уровня, определяемого компаратором, формирует команду управления силовыми ключами усилителя мощности. Постоянная интегрирования интегратора изменяется прямо пропорционально значению сигнала задания с помощью аналогового сумматора. Благодаря этому уменьшается погрешность формирования выходного параметра. 3 ил.
СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ АВТОНОМНЫМ ИНВЕРТОРОМ, при котором формируют сигнал, пропорциональный мгновенному значению выходного параметра инвертора, непрерывно сравнивают его с сигналом задания, полученный в результате сравнения сигнал ошибки непрерывно интегрируют, сравнивают интеграл сигнала ошибки с двумя равными по величине разнополярными пороговыми уровнями и в моменты их равенства переключают силовые ключи инвертора, отличающийся тем, что в процессе непрерывного интегрирования постоянную времени интегрирования увеличивают прямопропорционально модулю сигнала задания.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления автономным инвертором напряжения | 1986 |
|
SU1367115A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
