Изобретение относится к электротехнике и может быть использовано для управления преобразователем, питающимся от источника постоянного напряжения, к которому предъявляются повышенные требования по качеству регулирования выходного напряжения.
Известен способ управления преобразователем, состоящий в формировании выходного напряжения из последовательности прямоугольных импульсов, следующих с определенной частотой, длительность которых промодулирована по закону задающего напряжения [1]
Недостатком такого способа является зависимость регулируемого значения выходного напряжения преобразователя от паpаметров источника питания.
Наиболее близким к изобретению является способ управления следящим импульсным преобразователем, заключающийся в том, что формируют сигнал задания, формируют сигнал, пропорциональный мгновенному значению выходного напряжения преобразователя, сравнивают его с сигналом задания, в результате сравнения получают сигнал ошибки, формируют на его основе сигнал рассогласования, непрерывно интегрируют его, формируют два равных по величине разнополярных уровня переключения, сравнивают интеграл сигнала рассогласования с уровнями переключения и в моменты их равенства переключают ключевые элементы преобразователя, в котором значение сигнала рассогласования определяют в линейной зависимости от значения сигнала ошибки [2]
В этом способе устраняется влияние изменения параметров источника питания на величину выходного напряжения, однако при регулировании сигнала задания в значительной степени изменяется частота переключения ключевых элементов преобразователя, что затрудняет оптимальный выбор параметров фильтра выходного напряжения.
Техническим результатом заявляемого способа является повышение стабильности частоты переключений ключевых элементов преобразователя при регулировании выходного напряжения.
Этот результат достигается тем, что по способу управления следящим импульсным преобразователем, заключающемуся в том, что формируют сигнал задания, формируют сигнал, пропорциональный мгновенному значению выходного напряжения преобразователя, сравнивают его с сигналом задания, в результате сравнения получают приведенное значение сигнала ошибки, формируют на его основе сигнал рассогласования, непрерывно интегрируют его, формируют два равных по величине разнополярных уровня переключения, сравнивают интеграл сигнала рассогласования с уровнями переключения и в моменты их равенства переключают ключевые элементы преобразователя, сигнал рассогласования формируют путем умножения приведенного сигнала ошибки на коэффициент, определяемый формулой
K  где Uз напряжение сигнала задания;
где Uз напряжение сигнала задания;
Еп сигнал, пропорциональный выходному напряжению, приведенный к сигналу задания;
Uп пороговое напряжение уровней переключения.
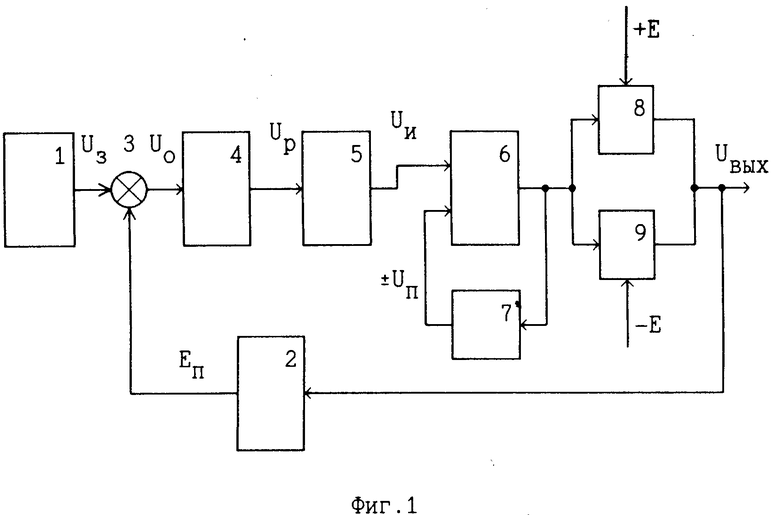
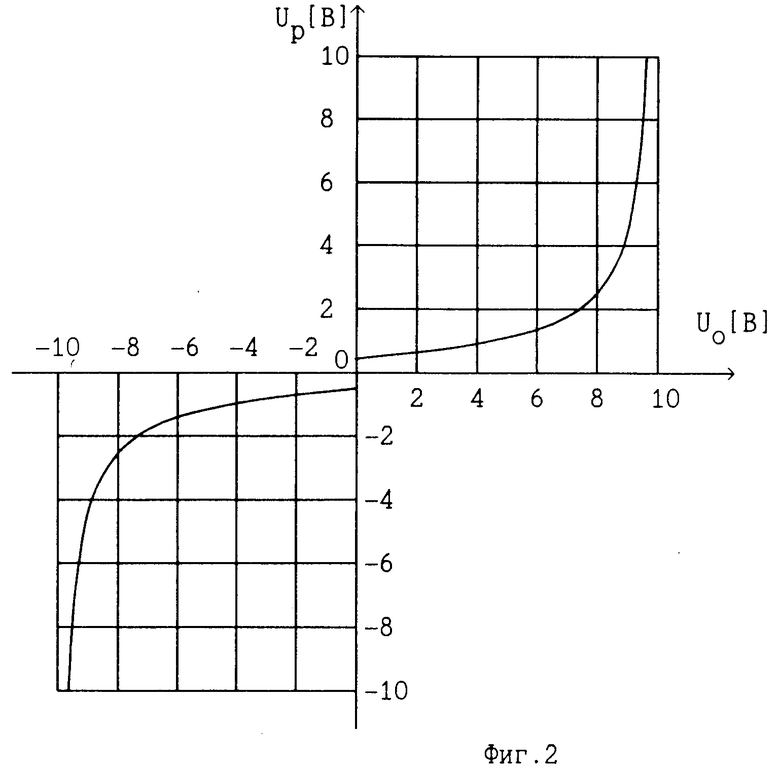
На фиг. 1 изображена функциональная схема преобразователя, реализующего предложенный способ; на фиг.2 характеристика "вход выход" функционального преобразователя сигнала ошибки в сигнал рассогласования, где +Е, -Е уровни выходного напряжения преобразователя, Uо сигнал ошибки, Uнорм нормирующее напряжениe, Uр сигнал рассогласования, Uи выходное напряжение интегратора, +Uп, -Uп напряжения уровней переключения компаратора, Uвых выходное напряжение преобразователя.
Импульсный преобразователь состоит из узла 1 задания, датчика 2 выходного напряжения преобразователя, узла 3 выделения ошибки (сумматор), функционального преобразователя 4, интегратора 5, компаратора 6 с узлом 7 задания уровней сравнения, ключевых элементов 8 и 9. Один из входов узла 3 выделения ошибки подключен к источнику 1 задающего напряжения, другой вход к выходу датчика 2 выходного напряжения преобразователя, а выход к входу функционального преобразователя 4, выход которого соединен с входом интегратора 5. Выход последнего подключен к одному из входов компаратора 6, другой вход которого связан с выходом узла 7 задания уровней сравнения 7 с входом, соединенным с выходом компаратора 6 и входами ключевых элементов 8 и 9. Выходы ключевых элементов 8 и 9 связаны между собой, с выходным зажимом преобразователя и подключены к входу датчика 2 выходного напряжения преобразователя.
Мгновенное значение выходного напряжения Uвых преобразователя может принимать лишь значения +Е или -Е, соответствующие напряжениям источников питания, так как силовые элементы 8 и 9 работают в режиме ключа.
Длительность включенного состояния одного из ключевых элементов можно определить из выражения
tn=  где Ти постоянная времени интегрирования интегратора 5;
где Ти постоянная времени интегрирования интегратора 5;
К1 текущее значение коэффициента пропорциональности функционального преобразователя 4, соответствующее данному значению ошибки.
Длительность смежного интервала, соответствующего противоположному состоянию ключевых элементов 8 и 9, определяется как
tn+1 где К2 текущее значение коэффициента пропорциональности функционального преобразователя 4, соответствующего данному значению ошибки.
где К2 текущее значение коэффициента пропорциональности функционального преобразователя 4, соответствующего данному значению ошибки.
В общем случае коэффициенты К1 и К2 различны.
Так как сумма длительностей смежных интервалов работы преобразователя составляет полный период работы, то можно записать
tn + tn+1 T.
Для определенности принимают Т4 Ти. Тогда +
+  4T
4T
(1)
Разность длительностей смежных интервалов определяет среднее значение выходного напряжения преобразователя и пpопорционально значению напряжения задания в этих интервалах, т.е.

 -4Tи
-4Tи
(2)
Суммируя выражения (1) и (2), получают 4 T
4 T 1-
1-  откуда
откуда
(Uз+Eп)K1= 

(3)
Если из выражения (1) вычесть выражение (2), то после аналогичных преобразований получают
(Uз-Eп)K2=  (4)
(4)
Очевидно, что выражения (3) и (4) с точностью до знака Еп совпадают. Часть (Uз±Еп) этих выражений представляет собой сигнал ошибки, а правая часть показывает, какой величины должен быть сигнал рассогласования, чтобы обеспечить условия уравнения (1) и (2), откуда видно, что сигнал рассогласования должен быть обратно пропорционален сопряженному значению ошибки, т.е. значению ошибки при противоположном состоянии ключевых элементов преобразователя. Такое значение сигнала рассогласования можно получить, умножая приведенное значение сигнала ошибки на коэффициент, определяемый формулой
K  (5)
(5)
Таким образом, выражения (3), (4) и (5) однозначно определяют вид зависимости "вход выход" функционального преобразователя 4, преобразующего сигнал ошибки в сигнал рассогласования, чтобы обеспечить достижение цели постоянство частоты переключения ключевых элементов преобразователя.
Величину порогового напряжения Uп целесообразно выражать в виде k Umax, где Umax максимально возможное напряжение рассогласования, обеспечиваемое элементами системы управления; k коэффициент пропорциональности.
Если, например, принять Umax 10В. Еп 5В, Uзmax 5В, k 0,1, то характеристика "вход-выход" функционального преобразователя 4 в соответствии с выражениями (3), (4) и (5) имеет вид, приведенный на фи г.2.
Сущность способа заключается в следующем.
Задающий сигнал Uз подают на один из входов узла 3 выделения сигнала ошибки, где сравнивают с сигналом Еп, пропорциональным мгновенному значению выходного напряжения, поступившим от датчика 2 выходного напряжения преобразователя. Полученный при этом сигнал ошибки приводят к относительной величине путем соответствующего выбора коэффициента передачи сумматора 3 и коэффициента передачи по соответствующему входу функционального преобразователя 4. При этом возможное минимальное значение сигнала ошибки равняется нулю, а максимально возможное значение величине нормирующего напряжения Uнорм, относительно которого осуществляется приведение. По полученному относительному значению фактической ошибки вычисляют относительное значение сопряженной ошибки путем вычитания полученного относительного значения фактической ошибки из величины нормирующего напряжения. Осуществляя обратно пропорциональное преобразование полученного таким образом относительного значения сопряженной ошибки, путем умножения на коэффициент К функционального преобразователя 4, соответствующий зависимости (5), получают сигнал рассогласования, который используют для дальнейшего интегрирования и формирования автоколебательного алгоритма широтно-импульсного преобразования. Функциональный преобразователь 4 реализует зависимость, определяемую выражением (5) (при соответствующих знаках фактической ошибки). Следует отметить, что функциональный преобразователь 4, реализующий преобразования по предложенному способу, может быть выполнен и на основе нелинейных звеньев с диодно-резистивными цепочками.
Таким образом, при работе преобразователя частота переключения ключевых элементов поддерживается постоянной. Из выражения (3) можно определить допустимое значение напряжения задания Uз, при котором частота переключения остается постоянной. Преобразуя это выражение и учитывая, что максимальное значение выходного напряжения функционального преобразователя 4 не может превышать Umax, получают Umax откуда Uздоп= kEп-Eп= Eп(k-1)
Umax откуда Uздоп= kEп-Eп= Eп(k-1)
Так, при принятых ранее величинах Uздоп -4,5В, что соответствует 0,9 Umax. Таким образом, в данном конкретном случае предложенный способ обеспечивает постоянство частоты переключений ключевых элементов преобразователя в диапазоне от 0 до 0,9 максимально возможного выходного напряжения.
Применение предложенного способа управления позволяет повысить качественные показатели преобразователей и дает возможность оптимизировать параметры выходных фильтров, предназначенных для сглаживания выходного напряжения преобразователей такого типа, и вследствие этого повысить энергетическую эффективность преобразователя в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛЕДЯЩЕГО ДИСКРЕТНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 1991 |
|
RU2025763C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ С ДВУХЗВЕННЫМ ФИЛЬТРОМ | 2009 |
|
RU2383049C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2021 |
|
RU2759688C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2497266C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2007 |
|
RU2339993C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2475805C2 |
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ АВТОНОМНЫМ ИНВЕРТОРОМ | 1991 |
|
RU2024175C1 |
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1993 |
|
RU2093949C1 |
| Способ управления импульсным понижающим преобразователем напряжения со стабилизацией тока (варианты) | 2017 |
|
RU2661900C1 |
| РЕЛЕЙНЫЙ СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2007 |
|
RU2345400C1 |
Использование: для управления преобразователями, к которым предъявляются повышенные требования по качеству регулирования выходного напряжения. Сущность изобретения: стабилизация частоты переключения ключевых элементов преобразователя. Это достигается за счет формирования сигнала рассогласования, обратно пропорционального сопряженному значению ошибки, определяемому как значение ошибки при противоположном состоянии ключевых элементов преобразователя, что позволяет стабилизировать частоту переключений ключевых элементов преобразователя практически в полном диапазоне регулирования выходного напряжения. 2 ил.
СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ, заключающийся в том, что формируют сигнал задания, формируют сигнал, пропорциональный мгновенному значению выходного напряжения преобразователя, сравнивают его с сигналом задания, в результате сравнения получают приведенное значение сигнала ошибки, формируют на его основе сигнал рассогласования, непрерывно интегрируют его, формируют два равных по величине разнополярных уровня переключения, сравнивают интеграл сигнала рассогласования с уровнями переключения и в моменты их равенства переключают ключевые элементы преобразователя, отличающийся тем, что сигнал рассогласования формируют путем умножения приведенного сигнала ошибки на коэффициент, определяемый формулой
где Uз напряжение сигнала задания;
Eп сигнал, пропорциональный выходному напряжению, приведенный к сигналу задания;
Uп пороговое напряжение уровней переключения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления автономным инвертором | 1978 |
|
SU892651A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
