Изобретение относится к машиностроению и может быть использовано в робототехнике, а также в приводах поворотных и делительных устройств.
Известен привод автооператора (ат.св. N 474426), который содержит средства, включающие мальтийские механизмы для периодического кругового вращения и реверсирования прямолинейного движения исполнительного органа. Мальтийские механизмы смонтированы в одном устройстве, выполненном в виде трех расположенных в одной плоскости мальтийских дисков с приводом от одного кривошипа. Недостатками устройства являются повышенный износ пальца кривошипа, что снижает надежность работы, а также невозможность изменить угол поворота исполнительного органа.
Известен также манипулятор, который содержит корпус, исполнительное устройство, имеющее вал, установленный в корпусе, и механизмы поворота и прямолинейного перемещения вала. Мальтийский диск механизма поворота связан с валом исполнительного устройства цепной передачей. Механизм прямолинейного перемещения вала выполнен в виде шарнирно установленного на валу кронштейна и кулачковой пары. Кулачок пары шарнирно установлен на корпусе и связан с кривошипом мальтийского механизма цепной передачей [1}. Кинематическая связь кривошипа и мальтийского диска с валом исполнительного устройства цепной передачей снижает надежность работы привода из-за удлинения цепи, особенно под нагрузкой. Введение натяжных роликов усложняет конструкцию, но не позволяет значительно повысить крутильную жесткость привода. Самое важное требование к современным манипуляторам - возможность изменения угла ротации вала исполнительного устройства - в известной конструкции манипулятора не выполняется, что является основным недостатком.
Целью изобретения является расширение технологических возможностей путем изменения угла ротации вала исполнительного устройства.
Достигается это тем, что привод манипулятора, содержащий корпус, исполнительное устройство, имеющее вал, установленный в корпусе, мальтийский механизм, диск которого кинематически связан с валом исполнительного устройства, и механизм прямолинейного перемещения вала, выполненный в виде шарнирно установленного на валу кронштейна и кулачковой пары, кулачок которой шарнирно установлен в корпусе и кинематически связан с кривошипом мальтийского механизма, усовершенствован. Это усовершенствование заключается в следующем: диск мальтийского механизма и кулачок кинематически связан с валом исполнительного устройства цилиндрическими зубчатыми колесами, причем зубчатые колеса между диском и валом выполнены сменными.
Использование в приводе манипулятора цилиндрических зубчатых колес позволяет увеличить крутильную жесткость привода, упростить конструкцию устройства, уменьшить его габариты, а главное позволяет осуществить смену зубчатых колес между мальтийскими диском и валом исполнительного устройства, т. е. изменить в широких пределах угол поворота вала исполнительного устройства.
Наличие отличительных признаков привода - кинематические связи диска и кулачка с валом исполнительного устройства зубчатыми цилиндрическими колесами и выполнение зубчатых колес между валом и диском мальтийского механизма сменными колесами характеризует предложенное техническое решение отвечающим критерию "новизна". Анализ известных технических решений в данной отрасли техники и в смежных отраслях не позволил обнаружить указанные отличительные признаки в известных решениях, что позволило сделать вывод о наличии "существенных отличий" у предложенного технического решения.
На чертеже приведена кинематическая схема привода манипулятора.
В корпусе 1 с возможностью осевого перемещения установлен подпружиненный вал 2, на котором свободно установлен кулачок 3. Вал 2 с закрепленной на его наружном торце поперечной или планшайбой (на чертеже не обозначены) составляют исполнительное устройство. На валу 2 шарнирно смонтирован кронштейн 4, несущий жестко установленный на кронштейне толкатель 5. Кронштейн 4 установлен на валу 2 с осевой фиксацией относительно вала и имеет консоль 6, размещенную в прямолинейном пазу 7 корпуса 1, предохраняющих кронштейн от проворота. Кулачок 3 установлен на корпусе 1 с возможностью вращения и несет на своем торце зубчатое цилиндрическое колесо 8. На корпусе 1 закреплен двигатель М, ось 9 червяка 10, а на валу 11 смонтировано червячное колесо 12, сцепленное с червяком 10, и зубчатое колесо 13, сцепленное с колесом 8 кулачка 3. На валу 11 закрепляется кривошип 14 мальтийского механизма, включающего палец 15 и диск 16 на оси 17, на которой расположено цилиндрическое зубчатое колесо 18, взаимодействующее через цилиндрическое колесо 19 со ступицей 20. В ступице 20 на скользящей шпонке 21 размещен вал 2. На корпусе 1 размещается конечный выключатель 22, установленный с возможностью взаимодействия с упором 23 кулачка 3.
Привод работает следующим образом. При включении двигателя М через червячную пару 10, 12 начинает вращаться вал 11, от которого вращение через зубчатые колеса 13 и 8 передается кулачку 3. Толкатель 5, соприкасаясь с рабочим профилем кулачка 3, поднимает кронштейн 4, а с ним, преодолевая сопротивление пружины, вал 2. Когда толкатель 5 выкатится на прямолинейный участок кулачка 3 (верхнее положение вала 2), осевое перемещение вала 2 прекращается. Равномерное вращение вала 11 продолжается, продолжается вращение шестерни 8 и кулачка 3. Вращается постоянно кривошип 14 с пальцем 15. При выходе толкателя 5 на прямолинейный участок осуществляется расфиксация кривошипом 14 мальтийского диска 16, палец 15 заходит в пазы диска 16 и поворачивает вал 17 на 1/Z оборота, где Z - число пазов диска 16. При повороте диска 16 (вала 17) через шестерни 18, 19 ступицу 20 с помощью шпонки 21 вал 2 повернется на угол α. Дальнейшее равномерное вращение вала 11 приводит к тому, что диск 16 фиксируется кривошипом 14, толкатель 5 сходит по нисходящей кривой рабочего профиля кулачка 3, вал 2 опускается в исходное положение. В исходное положение возвращается кулачок 3. Воздействует при этом упор 23 на конечный выключатель 22 и отключает двигатель М.
Далее цикл повторяется. При смене угла ротации вала 2 шестерни 18 и 19 заменяются на другие шестерни с другими передаточными отношениями, определение которых известно из следующей зависимости:
α =  , где α - угол ротации, градусы;
, где α - угол ротации, градусы;
Z - число пазов диска 16;
Z18, Z19 - числа зубьев колес.
При α = 180о, Z=6 значение Z19/Z18 определяется из соотношения Z19/Z18= 3; при α=90о - Z19/Z18=1,5; при α =45о Z19/Z18=0,75 и т.д., а зная требуемое передаточное отношение и межцентровое расстояние между валами (мальтийского диска и вала исполнительного устройства), легко определяются числа зубьев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1563966A1 |
| Привод автооператора | 1972 |
|
SU474426A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1990 |
|
RU2035268C1 |
| Автоматическая револьверная головка | 1987 |
|
SU1414516A1 |
| ПОВОРОТНЫЙ СТОЛ | 1992 |
|
RU2045382C1 |
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФОРМЫ СТРОЧКИ ШВЕЙНОЙ МАШИНЫ "ЗИГЗАГ" | 1990 |
|
RU2023086C1 |
| ГИТАРА СМЕННЫХ ШЕСТЕРЕН | 1992 |
|
RU2044202C1 |
| Конвективная автоматическая сушилка | 1990 |
|
SU1714311A1 |
| ПЕРЕНАЛАЖИВАЕМЫЙ АГРЕГАТНЫЙ СТАНОК | 1992 |
|
RU2032518C1 |
| ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU294416A1 |
Использование: машиностроение, в частности в робототехнике, а также в приводах поворотных и делительных устройств. Вал 2, установленный в корпусе 1, связан с мальтийским механизмом, диск 16 которого кинематически связан с валом 2 и с механизмом прямолинейного перемещения этого вала, выполненным в виде шарнирно установленного на валу 2 кронштейна 4 и кулачка 3, шарнирно установленного в корпусе и кинематически связанного с кривошипом 14 мальтийского механизма. При этом диск 16 мальтийского механизма и кулачок 3 кинематически связаны с валом 2 исполнительного устройства двумя цилиндрическими зубчатыми передачами. Зубчатые колеса 18 и 19 одной из передач выполнены сменными. 1 ил.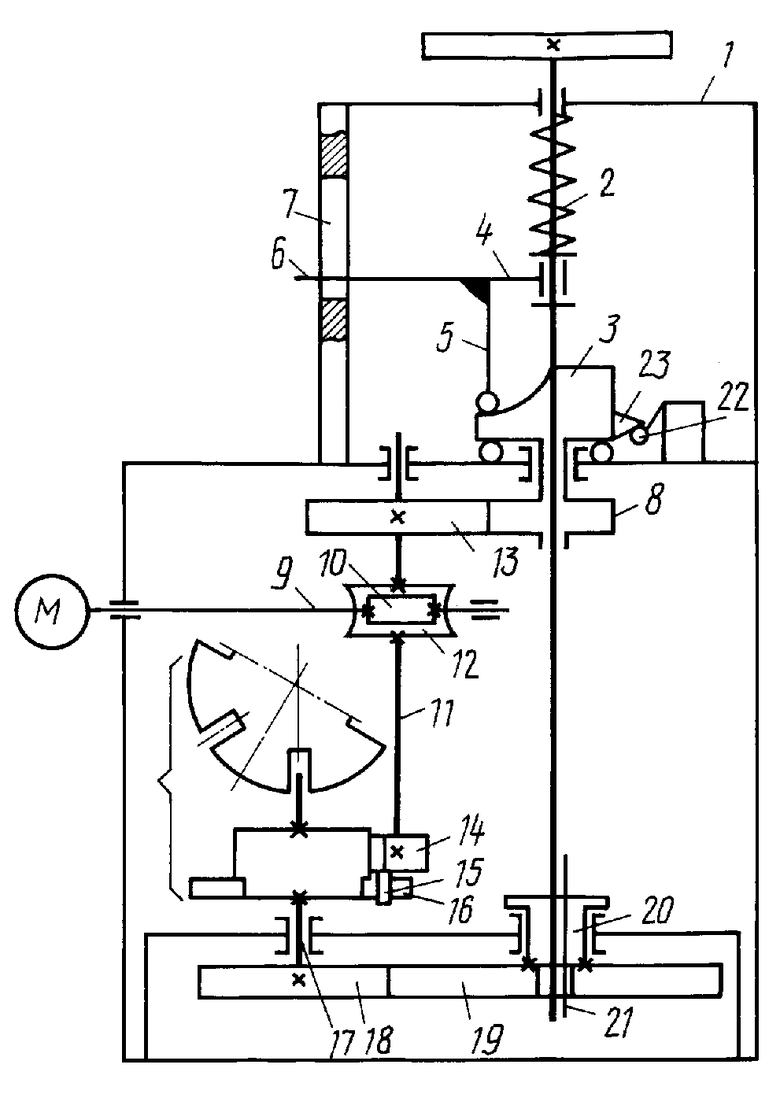
ПРИВОД МАНИПУЛЯТОРА, содержащий корпус, исполнительное устройство, имеющее вал, установленный в корпусе, мальтийский механизм, диск которого кинематически связан с валом исполнительного устройства, и механизм прямолинейного перемещения вала, выполненный в виде шарнирно установленного на валу кронштейна и кулачка, шарнирно установленного в корпусе и кинематически связанного с кривошипом мальтийского механизма, отличающийся тем, что диск мальтийского механизма и кулачок механизма прямолинейного перемещения вала кинематически связаны с валом исполнительного устройства двумя дополнительно введенными цилиндрическими зубчатыми передачами, причем зубчатые колеса передачи в кинематической цепи связи диска с валом выполнены сменными.
| Манипулятор | 1988 |
|
SU1563966A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
