Изобретение относится к устройствам для захвата и передачи изделий от одной технологической операции к другой и может быть использовано при производстве зубчатых колес как средство передачи изделия с конвейера на станок, с позиции на позицию и т. д. в автоматической линии.
Известен автоонератор с приводом исполнительного органа, совершающего два поочередных, согласованных между собой движения при помощи двух мальтийских механизмов, кинематически связанных между собой дифференциальной или планетарной передачей, причем реверсирование движения исполнительного органа осуществляется дополнительным узлом - кривошипным механизмом. Однако конструкции известного привода автооператора присущи сложность и инерционность.
Цель изобретения - упрощение конструкции и улучщение динамических характеристик автооператора.
Для этого средства вращения и реверсирования смонтированы в одном механизме, выполненном в виде трех расположениых в одной плоскости мальтийских дисков с приводом от одного кривошипа, два из которых кинематически связаны между собой.
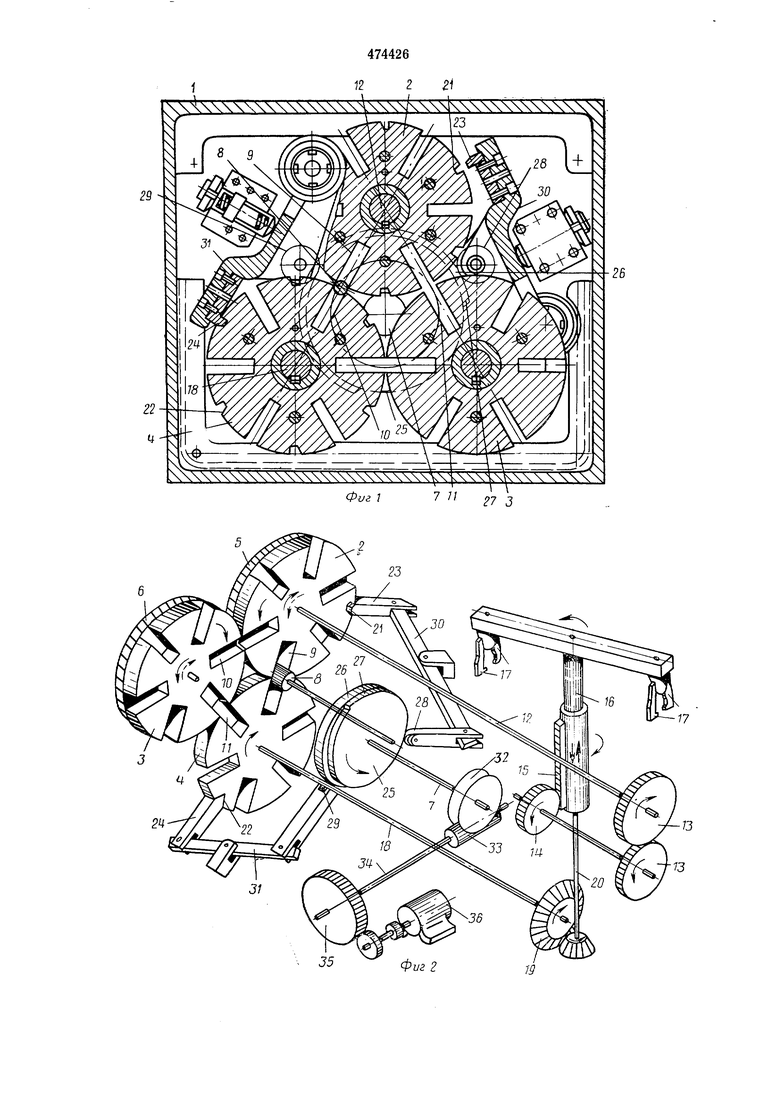
На фиг. 1 показан разрез автооператора в плоскости вращения мальтийских дисков; на
фиг. 2 - кинематическая схема предлагаемого автооператора.
В корпусе 1 автооператора (см. фиг. 1) смонтированы в одной плоскости три мальтийских диска 2, 3 и 4 (см. фиг. 1, 2). На дисках 2 и 3 установлены для совместного вращения и соосно с ними зубчатые колеса 5 и 6 (см. фиг. 1), находящиеся постоянно в зацеплении друг с другом таким образом, что диски 2 и 3 оказываются постоянно связанными через эти зубчатые колеса. Мальтийский диск 4 установлен для независимого вращения относительно дисков 2 и 3. Нараллельно осям мальтийских дисков и на равнорасноложенном от них расстоянии установлен вал 7 кривошипа таким образом, что палец 8 (см. фиг. 1, 2) кривошипа при вращении последнего может поочередно входить в зацепление с пазами 9, 10, 11 мальтийских дисков 2, 3, 4. Мальтийский диск 2 через вал 12, сменные колеса 13 и шестерню 14 связан с зубчатой рейкой 15 подвижной стойки 16 с захватами 17 для заготовок зубчатых колес. Мальтийский диск 4 через вал 18 и сменные колеса 19 угла поворота стойки 16 связан с телескопическим валом 20 подвижной стойки 16. Для надежной фиксации подвижной стойки 16 в онределенно.м положении мальтийские диски 2 и 4 имеют пазы 21 и 22, в которые входят фиксирующие собачки 23 и 24
Момент фиксации мальтийских дисков 2 и 4 зависит от положения двухдорожечного кулачка 25, установленного на валу 7 кривошипа с дорожками 26 и 27 и контактирующими с кулачком следящими роликами 28 и 29, воздействующими через рычаги 30 и 31 на соответствующие фиксирующие собачки 23 и 24.
Вал 7 кривощипа через червячное колесо 32 и червяк 33, вал 34 и сменные колеса 35 времени цикла связан с приводом 36 автооператора.
Автооператор работает следующим образом.
Вращение привода 36 через сменные колеса 35, вал 34, червяк 33 и червячное колесо 32 передается на вал 7 кривощипа. При направлении его вращения, указанном стрелкой (см. фиг. 2), палец 8 кривощипа, входя в один из пазов 9 мальтийского диска 2, начинает его вращать. Вращение диска 2 через вал 12, сменные колеса 13 хода стойки 16 и щестерню 14 передается на зубчатую рейку 15 подвижной стойки 16, которая начинает подниматься. Мальтийский диск 3, находясь в кинематической связи через зубчатые колеса 5 и 6 с мальтийским диском 2, вращается синхронно с ним в противоположном направлении. Когда в своем движении палец 8 кривощипа выйдет из паза 9 диска 2 и войдет в один из пазов 10 диска 3, то направление вращения диска 3 изменится на противоположное. Это вращение через вал 12 и колеса 13 передается на щестерню 14, которая, находясь в зацеплении с зубчатой рейкой 15, будет опускать ее. Когда палец 8 кривошипа выйдет из паза 10 диска 3 и войдет в один
из пазов 11 диска 4, диски 2 и 3 останавливаются, а диск 4 начинает вращаться в направлении, указанном стрелкой. Его вращение через вал 18, сменные колеса 19 угла поворота стойки 16 и телескопический вал 20 передается на подвижную стойку 16, которая также начинает вращаться.
Во время вращения дисков 2 и 3 происходит аксиальное перемещение подвижной стойки 16 в ту или другую сторону в зависимости от того, с каким из этих дисков взаимодействует палец 8 кривошипа. В это время диск 4 неподвижен и зафиксирован собачкой 24, а следовательно, и стойка 16 зафиксирована от
кругового движения. Напротив, при вращении диска 4 через вал 18, сменные колеса 19 и вал 20 происходит вращение подвижной стойки 16, диски 2 и 3 зафиксированы собачкой 23 и неподвижны, а следовательно, и стойка 16 зафиксирована от аксиального перемещения.
Предмет изобретения
Привод автооператора, содержащий средства, включающие мальтийские механизмы для периодического кругового вращения и реверсирования прямолинейного движения исполнительного органа, отличающийся тем, что, с целью упрощения конструкции и улучщения динамических характеристик автооператора, средства вращения и реверсирования смонтированы в одном механизме, выполненном в виде трех расположенных в одной плоскости мальтийских дисков с приводом от одного кривошипа, два из которых кинематически связаны между собой.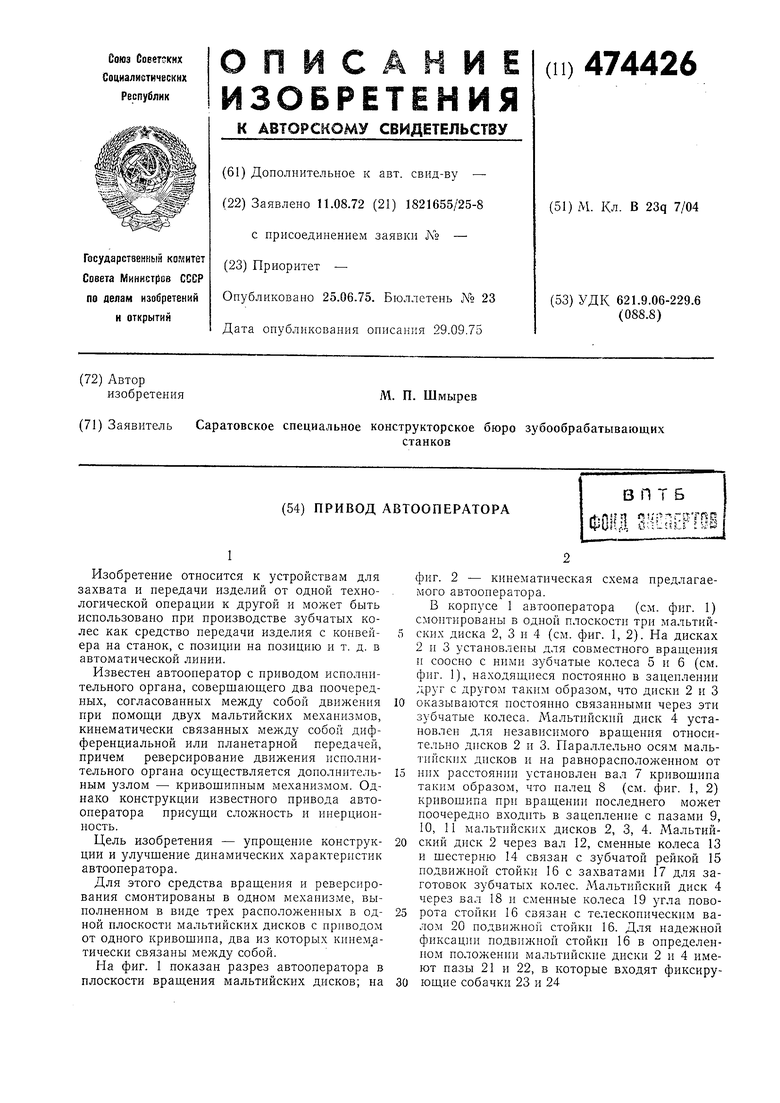
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ДЛИННОМЕРНЫХЗАГОТОВОК | 1969 |
|
SU245522A1 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
| Загрузочное устройство | 1987 |
|
SU1509222A1 |
| Устройство для перегрузки яиц из ячеечной тары на транспортер | 1972 |
|
SU490739A1 |
| Устройство для обработки цилиндрической поверхности с направляющей линией в виде трохоиды | 1981 |
|
SU984823A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| Автооператор для металлорежущих станков | 1977 |
|
SU691274A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |