Изобретение относится к машиностроению и может быть использовано в робототехнике.
Цель изобретения - повышение надежности за счет уменьшения износа элементов мальтийского механизма„
На фиг.1 приведена кинематическая схема манипулятора; на фиг„2 - вид А на фиг.1; на фиг.З - вид Б на фиг.1 на фиг „4 - схема установки кронштейна на валу исполнительного устройства и конструкция цилиндрического кулачка.
В корпусе 1 манипулятора смонтированы в одной плоскости диск 2 мальтийского механизма и диски 3 и 4 (фиг.2 и 1). На дисках 3 и Ц жестко установлены для совместного вращения и соосно с ними зубчатые колеса 5 и 6 (см. фиг.1), находящиеся постоянно в зацеплении друг с другом таким образом, что диски 3 и 4 оказываются постоянно связанными через зубчатые колеса.. Мальтийский диск 2 установлен для независимого вращения относительно дисков 3 и 4. Параллельно осям дисков 2, 3 и 4 и на равнорасположенном от них расстоянии установлен вал 7 кривошипа таким образом, что палец 8 (фигЛ и 2) кривошипа при вращении последнего может поочередно входить в зацепление с пазами 9, 10, 11 дисков 2, 3 и А. Диск 2 через вал 12, цепную передачу 13 связан с валом 14 исполнительного устройства 15.Для надежной фиксации исполнительного устройства в определенном угловом положении соосно с мальтийским диском на валу 12 установлена планшайба 16 с цилиндрическими канавками 17, в которые входят фиксаторы 18 осей зуб
5
35
0
40
45
50
55
чатых колес 5 и 6 (фиг.З). Вал 7 кривошипа червячной передачей 19, предохранительной муфтой 20 кинематически связан с двигателем М, а цепной передачей 21 - с торцовым кулачком
22,установленным в корпусе 1 с возможностью вращения соосно с валом
14 исполнительного устройства 15. На валу 14 установлен кронштейн
23,несущая часть 2k которого установлена с возможностью вращения между буртом 25 вала 14 и ограничительным пружинным кольцом 26 с помощью упорного подшипника 27 и колец 28. На несущей части 24 закреплен поводок 29, контактирующий роликом 30 с цилиндрическим кулачком 22. Кронштейн 23 удерживается от поворота относительно вала 14 штифтом 31, размещенным одним своим концом в вертикальных направляющих 32, выполненных в корпусе 1, а другим концом жестко закрепленным на поводке 29. С целью уменьшения перекосов и давления на вал 14 в устройстве может устанавливаться второй поводок 33 и второй кулачок 34 (см. фиг.4) , размещенный внутри кулачка 22 и имеющего одинаковое расстояние между нижней и верхней рабочей поверхностью. Исполнительное устройство 15 поджимается к кулачкам 22 и 34 пружиной 35. Для выключения манипулятора используется выключатель 36, установленный
на корпусе 1.
Манипулятор работает следующим образом.
В исходном положении ролики 30 касаются нижней рабочей поверхности кулачка 22, а палец 8 кривошипа находится в пазах 10 и 11 дисков 3 и 4. При
20
25
чивает диск 3, при этом осуществляется установленный в корпусе, привод ис- поворот фиксаторов 18, которые поворачиваются с диском 3 (через зубчатые колеса 5 и 6 осуществляется поворот диска Ц) и выходят из цилиндрических канавок 17 планшайбы 16, расфиксация осуществляется на участке взаимодействия роликов 30 с криволинейной рабочей частью торцового кулачка, при последующем вращении палец 8 кривошипа заходит в паз 9 диска-2, поворачивает его, а через вал 12, цепную передачу 13 поворачивается на требуемый угол вал 1 и исполнительное устройство 15.
Поворот вала завершается к моменту подхода роликов 30 к ниспадающему участку цилиндрических кулачков, совпадающему с моментом подхода пальца 8 кривошипа к пазу 11 диска k. Заход пальца 8 в паз 11 диска А приводит к повороту последнего, а через зубчатые колеса 5 и 6 поворачивается диск 3. Концы осей зубчатых колес 5 и 6 размещаются в соответствующих канавках 17 планшайбы 16, чем обеспечивается фиксация углового поворота планшайбы и исполнительного органа.
ВидА
30
35
40
полнительного устройства, имеющий двигатель и мальтийский механизм, диск которого кинематически связан с валом исполнительного устройства, а кривошип кинематически связан с двигателем, а также механизм прямоли нейного перемещения исполнительного устройства, отличающийся тем, что, с целью повышения надежнос ти за счет уменьшения износа элементов мальтийского механизма, он снаб жен кронштейном, шарнирно установлен ным на валу исполнительного устройст ва, а также штифтом, жестко смонтиро ванным на этом кронштейне, а на корпусе выпопнены направляющие, взаимодействующие с указанным штифтом, при чем механизм прямолинейного перемеще ния исполнительного устройства выполнен в виде кулачковой пары, кулачок которой шарнирно установлен в корпусе, а толкатель выполнен в вид роликов, шарнирно закрепленных на кронштейне, при этом кулачок выполнен цилиндрическим и кинематически связан с кривошипом мальтийского механизма.gujg
Фиг. 2
установленный в корпусе, привод ис-
полнительного устройства, имеющий двигатель и мальтийский механизм, диск которого кинематически связан с валом исполнительного устройства, а кривошип кинематически связан с двигателем, а также механизм прямолинейного перемещения исполнительного устройства, отличающийся тем, что, с целью повышения надежности за счет уменьшения износа элементов мальтийского механизма, он снабжен кронштейном, шарнирно установленным на валу исполнительного устройства, а также штифтом, жестко смонтированным на этом кронштейне, а на корпусе выпопнены направляющие, взаимодействующие с указанным штифтом, причем механизм прямолинейного перемещения исполнительного устройства выполнен в виде кулачковой пары, кулачок которой шарнирно установлен в корпусе, а толкатель выполнен в виде роликов, шарнирно закрепленных на кронштейне, при этом кулачок выполнен цилиндрическим и кинематически связан с кривошипом мальтийского механизма.gujg
16
Фигд
22
У

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
| ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU294416A1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| Поворотно-делительный стол | 1990 |
|
SU1773685A1 |
| Зубошлифовальный станок для конических колес с круговыми зубьями | 1974 |
|
SU518287A1 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| Автоматическая револьверная головка | 1987 |
|
SU1414516A1 |
| МАШИНА ДЛЯ ФРАНКИРОВАНИЯ ПОЧТОВЫХ ПАКЕТОВ | 1970 |
|
SU280365A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
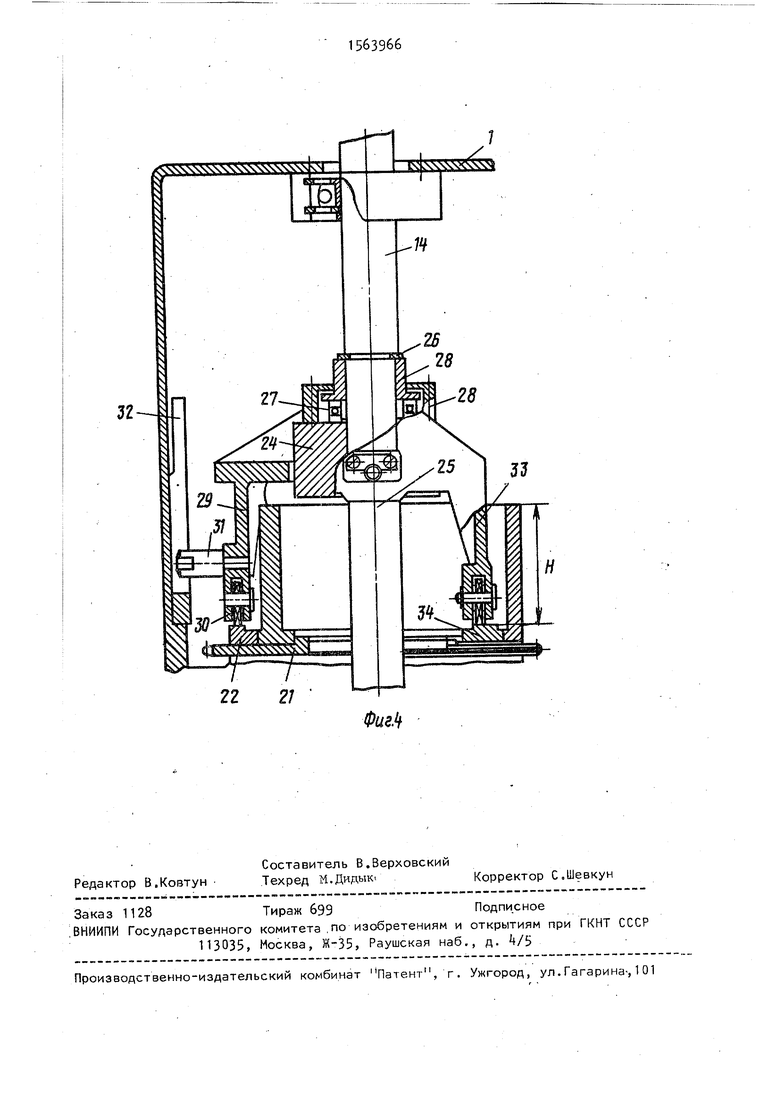
Изобретение относится к машиностроению и может быть использовано в робототехнике. Цель изобретения - повышение надежности за счет уменьшения износа элементов мальтийского механизма. В корпусе 1 установлено исполнительное устройство 15 с валом 14, кинематически связанное с приводом, имеющим двигатель и мальтийский механизм. Механизм прямолинейного перемещения исполнительного устройства выполнен в виде кулачковой пары с цилиндрическим кулачком 22 и роликами, шарнирно закрепленными на кронштейне 23. В исходном положении ролики касаются нижней рабочей поверхности кулачка 22. При включении двигателя привода вращение передается кривошипу, который поворачивает диск 2 мальтийского механизма, кинематически связанный с валом 14 исполнительного устройства. Одновременно производится поворот цилиндрического кулачка 22, который кинематически связан с кривошипом. Поворот кулачка приводит к перемещению кронштейна 23, шарнирно установленного на валу 14 соосно с этим валом. При этом кроншейн фиксируется от поворота с помощью штифта, жестко закрепленного на нем и взаимодействующего с направляющими, выполненными в корпусе. В результате перемещения кронштейна 23 происходит подъем исполнительного устройства, а после того, как ролики переместятся в крайнее верхнее положение, исполнительное устройство 15 поворачивается вследствие поворота диска 2. Дальнейший поворот цилиндрического кулачка 22 приводит к опусканию исполнительного устройства и к его возврату в исходное положение. 4 ил.
| Привод автооператора | 1972 |
|
SU474426A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
