Изобретение относится к транспортному машиностроению, а именно к управлению маневром транспортного средства и его звеньев.
Наиболее близким к предлагаемому является способ, позволяющий изменять направление движения транспортного средства на любой необходимый угол, не совершая при этом поступательного движения. Предварительно осуществляют подъем передней оси перед ее поворотом, а после ее опускания производят подъем средней оси с последующим ее поворотом и опусканием. Существующие способы маневрирования позволяют производить поочередное перемещение в горизонтальном или вертикальном направлении только одной из осей транспортного средства. Это достигается в результате складывания шарнирно сочлененных звеньев транспортного средства, что вызывает большие усилия и энергозатраты в гидроприводе транспортного средства. Кроме того, методы маневрирования можно использовать только для транспортных средств определенной компановки с шарнирно сочлененной рамой, что сужает область применяемости указанных способов. Известные способы не обеспечивают во время маневра синхронный поворот заданной группы осей относительно сопряженных с ними звеньев и не позволяют перемещать транспортное средство в поперечном направлении.
Предложен способ маневрирования автопоезда, каждое звено которого установлено на передней и задней двухосных поворотных тележках, включающий изменение положения звеньев без их продольно-поступательного движения, так, что сначала синхронно поднимают передние или задние оси каждой поворотной тележки, затем поворачивают каждую тележку в горизонтальной плоскости вокруг вертикали, проходящей через центр масс неподнятой оси, после чего поднятые ранее оси опускают.
Предложенный способ маневрирования может быть осуществлен для транспортных средств с различными вариантами компоновки звеньев и гидрооборудования. Рама транспортного средства может быть выполнена жестко или иметь шарнирные соединения. Транспортное средство может быть как однозвенным, так и многозвенным. Способ хорошо сочетается с задачами и характеристиками перспективных модульных автопоездов типа МАЗ-2000 ("Перестройка"), состоящих из взаимозаменяемых модулей и предусматривающих множество вариантов компоновки модулей в зависимости от эксплуатационных целей.
Поворот двухосных тележек существенно уменьшает необходимую для горизонтального перемещения колесных осей мощность гидропривода, так как она не требует поворота звеньев транспортного средства совместно с перемещаемыми осями. Эта операция позволяет совершать синхронный поворот группы колесных осей, что дает возможность не только изменять направление движения звеньев транспортного средства, не совершая при этом поступательного движения, и преодолевать определенные препятствия (ямы, рвы, отдельные камни, бревна и т.д.), но и производить перемещение транспортного средства в поперечном направлении.
Сущность способа поясняется на примере работы модульного автопоезда МАЗ-200 ("Перестройка").
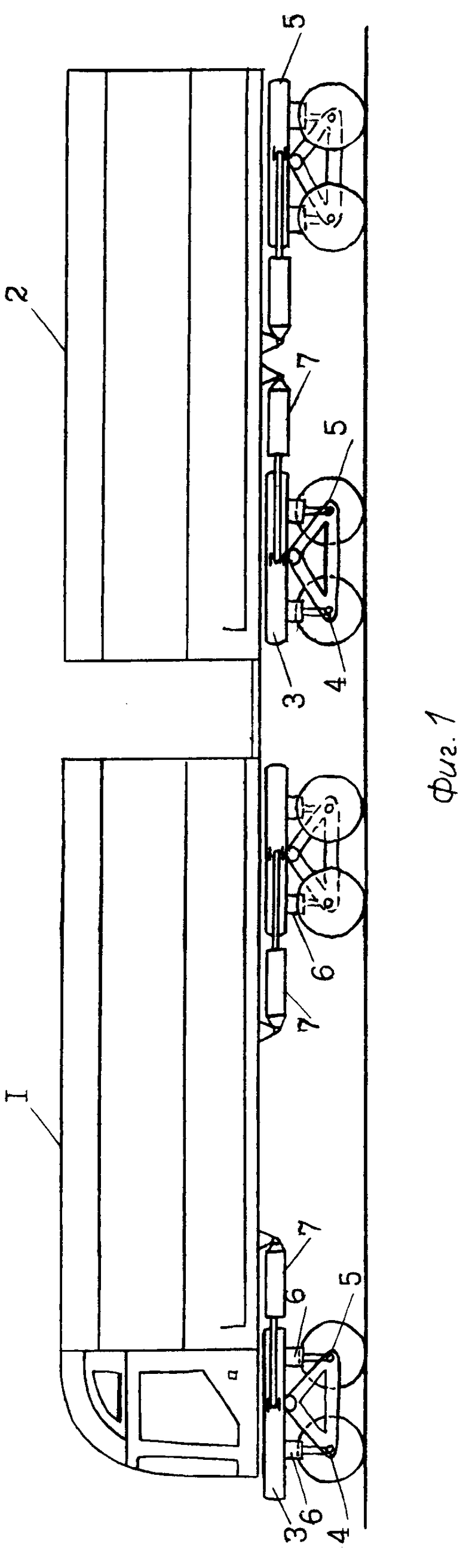
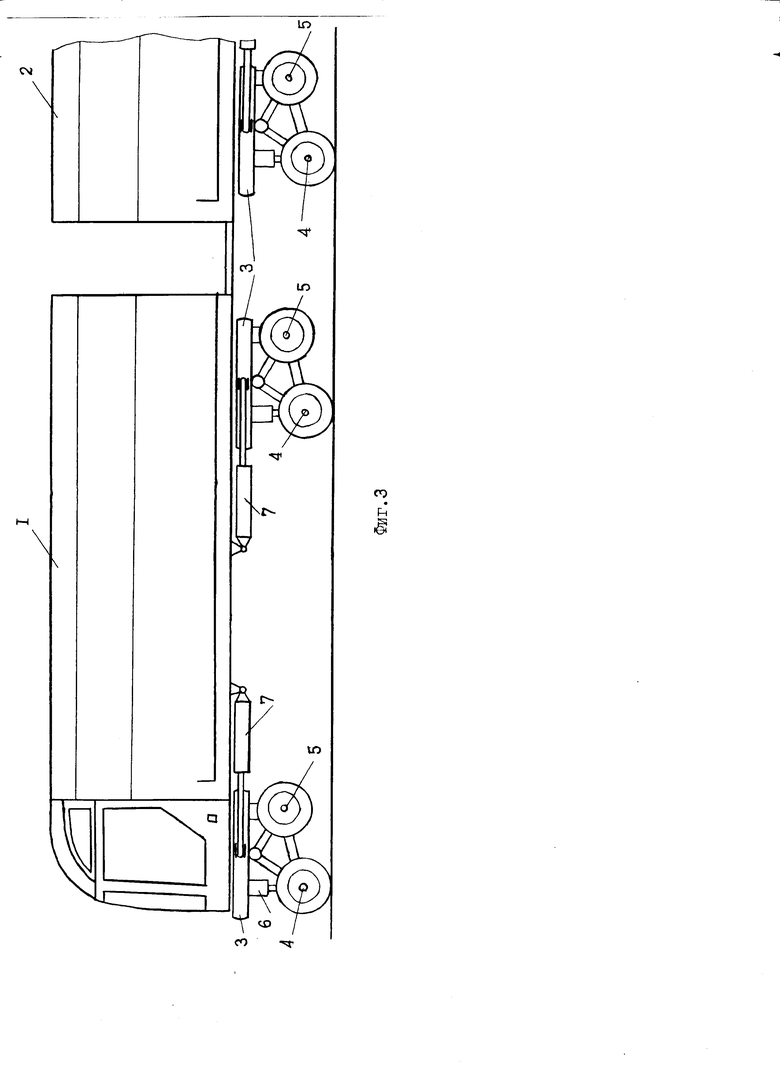
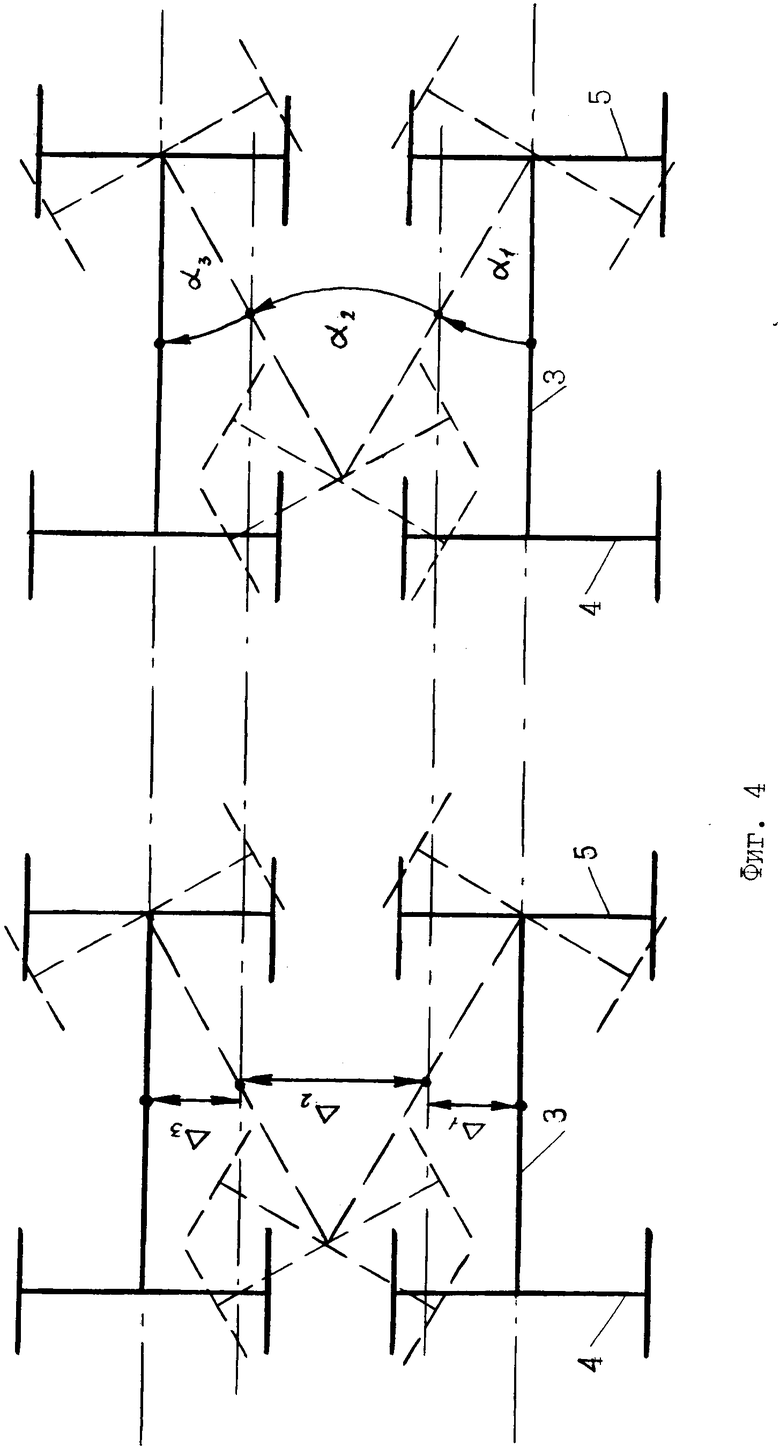
На фиг.1 показано положение колесных осей, соответствующее прямолинейному движению транспортного средства; на фиг.2 - вертикальное перемещение передних осей поворотных тележек транспортного средства; на фиг.3 - вертикальное перемещение задних осей поворотных тележек транспортного средства; на фиг.4 - фазы горизонтального перемещения в поперечном направлении колесных осей транспортного средства.
Предложенное транспортное средство имеет два шарнирно соединенных через дышло звена 1,2, установленных на двухосных поворотных тележках 3. Передние 4 и задние 5 колесные оси поворотных тележек 3 перемещаются в вертикальной плоскости гидроцилиндрами 6, а в горизонтальной плоскости - путем поворота тележек 3 гидроцилиндрами 7. К последнему звену 2 транспортного средства могут подсоединяться последующие звенья, связанные между собой через дышло и шарнир и управляемые так же, как и предшествующие звенья.
Управление транспортным средством осуществляется следующим образом.
При работе в сложных эксплуатационных условиях (на ограниченных площадях, пересеченной местности, лежневых и горных дорог и т.д.) возникает необходимость в изменении направления движений звеньев транспортного средства, не совершая при этом поступательного движения, либо его перемещении в поперечном направлении.
Для этого необходимо обеспечить эффективное перемещение осей и звеньев транспортного средства в горизонтальной плоскости с наименьшим сопротивлением. Указанная цель достигается путем поэтапного вывешивания передних и задних колесных осей поворотных тележек с последующим синхронным поворотом тележек в заданном направлении. Способ включает следующие операции.
Из первоначального положения (см.фиг.1) гидроцилиндрами 6 вывешивают передние колесные оси 4 (см.фиг.2) и поворачивают их посредством поворотных тележек 3 и гидроцилиндров 7 относительно задних осей 5 на угол α 1 в горизонтальной плоскости (см.фиг.4) с последующим опусканием. Затем вывешивают задние колесные оси 5 (см.фиг.3) и поворачивают их относительно передних осей 4 в горизонтальной плоскости на угол α 2 (см.фиг.4). В результате выполненных операций звенья 1,2 транспортного средства синхронно переместятся в поперечном направлении соответственно на расстоянии Δ 1 и Δ 2. Для достижения первоначального положения колесных осей относительно их звеньев (см. фиг.1) вывешивают передние колесные оси (см.фиг.2) и поворачивают их в горизонтальной плоскости на угол α 3 (см.фиг.4) с последующим опусканием. В итоге положение транспортного средства будет соответствовать его прямолинейному движению, а общее продольное перемещение составит
Δ = Δ 1 + Δ 2 + Δ 3
В случае необходимости поворота звеньев транспортного средства, не совершающего поступательного движения на заданный угол, перечисленные операции выполняются применительно к отдельным двухосным поворотным тележкам, в результате чего звенья разворачиваются относительно незадействованных в операциях поворотных тележек на заданный угол и тем самым изменяют направление движения транспортного средства.
Таким образом, путем поэтапного синхронного поворота относительно друг друга передних 4 и задних 5 колесных осей двухосных тележек 3 в вертикальной и горизонтальной плоскостях осуществляют поперечное перемещение звеньев 1,2 и задают необходимое направление движения транспортного средства, не совершая при этом продольного поступательного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХОСНЫЙ ПРИЦЕП | 2009 |
|
RU2397905C1 |
| Опорно-поворотное устройство двухосного прицепа | 2022 |
|
RU2792193C1 |
| ТЯГОВАЯ ПЛАТФОРМА, СПОСОБ ЭКСПЛУАТАЦИИ ТЯГОВОЙ ПЛАТФОРМЫ, СПОСОБ ИСПОЛЬЗОВАНИЯ ТЯГАЧА ДЛЯ ПЕРЕОБОРУДОВАНИЯ ПРИЦЕПА ПРИ СОСТЫКОВКЕ ПОЕЗДА И СПОСОБ ЭКСПЛУАТАЦИИ ТЯГАЧА И ТЕЛЕЖЕК ДЛЯ ТРАНСПОРТИРОВКИ ОДНОГО И БОЛЕЕ УНИВЕРСАЛЬНЫХ ПРИЦЕПОВ. | 1993 |
|
RU2120390C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КРЕСТООБРАЗНОЙ СЦЕПКИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019460C1 |
| Коник транспортного средства | 1987 |
|
SU1442442A1 |
| Ходовая часть подвижного состава с рулевой колёсной парой | 2019 |
|
RU2710051C1 |
| Стабилизатор устойчивости прямолинейного движения двухосного прицепа | 2021 |
|
RU2772941C1 |
| Устройство для управления угловым положением колесных пар челюстной тележки в железнодорожном пути в зависимости от направления движения | 2022 |
|
RU2783718C1 |
| Сочлененное транспортное средство | 1985 |
|
SU1288111A1 |
| Опорно-поворотное устройство двухосного прицепа с переменным наклоном шкворня | 2021 |
|
RU2774087C1 |
Использование: для управления колесными транспортными средствами, в частности для управления многозвенными автопоездами, оборудованными двухосными поворотными тележками. Сущность изобретения: осуществляют перемещение звеньев 1 и 2 транспортного средства путем синхронного поворота гидроцилиндрами в горизонтальной и вертикальной плоскостях заданных групп передних 4 или задних осей 5 двухосных поворотных тележек относительно сопряженных с осями звеньев. 4 ил.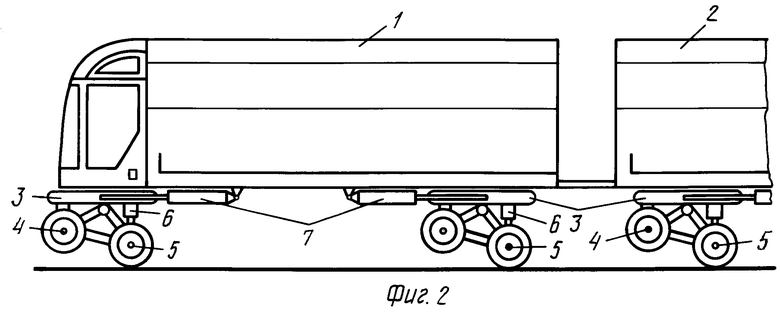
СПОСОБ МАНЕВРИРОВАНИЯ АВТОПОЕЗДА, каждое звено которого установлено на передней и задней двухосных поворотных тележках, включающий изменение положения звеньев без их продольно-поступательного движения, отличающийся тем, что сначала синхронно поднимают передние или задние оси каждой поворотной тележки, затем поворачивают каждую тележку в горизонтальной плоскости вокруг вертикали, проходящей через центр масс неподнятой оси, после чего поднятые ранее оси опускают.
| Способ управления поворотом многозвенного транспортного средства | 1989 |
|
SU1668196A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
