Изобретение относится к транспортному машиностроению и касается способов управления транспортными средствами.
В системах управления длиннобазных автопоездов широко используется тросовый привод поворотной тележки прицепного звена. Известно много способов управления тросовым приводом поворотной тележки прицепного звена автопоезда. Общим недостатком известных способов является отсутствие возможностей эффективного и точного предварительного регулирования длин и усилий в гибких тягах тросового привода, обеспечивающее движение прицепного звена по заданной траектории.
В известном способе (прототип) осуществляется регулирование системы управления автопоезда, состоящего из тягача и прицепа-роспуска, где тягач связан тросовым приводом с поворотной тележкой прицепа-роспуска. Данная связь тягача с поворотной тележкой прицепа-роспуска называется крестообразной сцепкой, поскольку тяги тросового привода перекрещиваются. Способ заключается в том, что эмпирически методом подбора определяют необходимое соотношение усилий и длин гибких тяг тросового привода, так чтобы прицеп-роспуск следовал за тягачом по определенной траектории. Качество регулировки системы управления определяется с помощью пробных заездов автопоезда как на прямолинейных, так и на криволинейных участках траектории. После каждой серии пробных заездов производят корректировку системы управления с учетом выявленных недостатков и весь процесс повторяют сначала до окончательной стадии системы управления.
Для правильной работы крестообразной сцепки окончательную регулировку натяжения тяговых тросов проводят непосредственно после выхода груженого автопоезда из поворота минимального радиуса на прямую, причем провисание тяговых тросов должно быть не более 2-3 см. Низкая эффективность и высокая трудоемкость данного способа очевидна. Кроме того, отсутствие средств контроля и измерения соотношений усилий и длин тяговых тросов привода ограничивает возможности регулировки и снижает ее точность.
Целью изобретения является повышение точности и эффективности регулирования тяговых тросов.
Это достигается тем, что в способе регулирования крестообразной сцепки тягача и связанного с ним посредством тросового привода управления прицепа-роспуска с поворотной тележкой, заключающемся в том, что регулировку натяжения тяговых тросов проводят при положении тягача и прицепа-роспуска, соответствующем прямолинейному движению, установку тягача и прицепа-роспуска в положение, соответствующее прямолинейному движению, проводят путем последовательной установки ограничителей в кинематических связях тягач-прицеп-роспуск, прицеп-роспуск-поворотная тележка, при регулировке натяжения тяговых тросов измерительными приборами осуществляют контроль и выравнивание нагрузок в ограничителях кинематической связи прицеп-роспуск-поворотная тележка, после чего кинематические связи освобождаются от ограничителей.
В известном способе не используется предварительная фиксация тягача, прицепа-роспуска и поворотной тележки, а их взаимное расположение оценивается только визуально. Особенностью предложенного способа является то, что перед непосредственной регулировкой системы управления с помощью ограничителей обеспечивается взаимное положение тягача, прицепа-роспуска и поворотной тележки транспортного средства, удовлетворяющее условию его прямолинейного движения. Таким образом, установка ограничителей является приемом, обеспечивающим одновременно фиксацию и симметрию тягача, прицепа-роспуска и поворотной тележки относительно продольной оси транспортного средства.
Контроль за качеством подбора необходимых соотношений усилий и длин тяговых тросов осуществляют непосредственно в процессе регулировки с помощью измерительных приборов, а не в результате серий пробных заездов автопоезда. Причем использование измерительного прибора в каждом из ограничителей кинематической связи прицеп-роспуск-поворотная тележка гарантирует достижение одинакового натяжения в тяговых тросах привода.
На чертеже представлена схема регулировки крестообразной сцепки автопоезда.
К рассматриваемой схеме относятся многие перспективные и ныне широко применяемые в народном хозяйстве транспортные средства. Предлагаемый способ отрабатывался при использовании автопоезда МАЗ509А+ГКБ 9383, где ведущим звеном 1 является тягач МАЗ 509А, а ведомым звеном 2 - прицеп-роспуск ГКБ 9383. Тяговые тросы привода 3 с натяжными устройствами 4 связывают тягач 1 с поворотной тележкой 5 прицепа-роспуска 2. Положение тягача 1, прицепа-роспуска 2 и поворотной тележки 5 относительно продольной оси автопоезда при его прямолинейном движении фиксируют ограничителями 6,7. Причем ограничители 7 кинематической связи 2-5 оборудованы измерительными приборами 8. В предложенной схеме используются гибкие ограничители определенной длины, которые крепятся к соответствующим точкам на тягаче и прицепе-роспуске, а также на поворотной тележке. Для установки ограничителей на автопоезде МАЗ 509А+ГКБ 9383 можно использовать дополнительные гнезда для крепления тяговых тросов привода к тяговой балке тягача и специальные хомуты, устанавливаемые на дышле прицепа-роспуска на определенном расстоянии от тягача и поворотной тележки. После завершения регулировки хомуты вместе с ограничителями снимаются с транспортного средства. В качестве измерительных приборов могут использоваться тензометрические звенья либо оттарированные приборы с упругими элементами, выполненные с возможностью блокировки упругих элементов и работающие по принципу динамометра. В последнем случае при установке ограничителей 7 работа упругих элементов измерительных приборов 8 должна быть заблокирована. В момент регулировки тяговых тросов привода 3 блокировка упругих элементов снимается.
Весь процесс регулировки крестообразной сцепки автопоезда можно разбить на два этапа.
На первом этапе устанавливается и фиксируется положение кинематических звеньев 1,2 и 5 относительно продольной оси транспортного средства, соответствующее его прямолинейному движению. Это достигается в результате последовательного чередования операций установки ограничителей 6,7 и операций маневрирования транспортным средством. При незначительном правом или левом повороте транспортного средства происходит натяжение уже наложенных на кинематические связи 1-2 и 2-5 ограничителей. Одновременно изменяется взаимное положение кинематических звеньев 1,2 и 5. Это позволяет поочередно установить все ограничители 6,7, фиксирующие кинематические связи 1-2 и 2-5.
На втором этапе регулировки крестообразной сцепки производится с помощью устройств 4 натяжение тяговых тросов привода 3. Контроль за натяжением гибких тяг осуществляется с помощью показаний измерительных приборов 8, ограничителей 7, кинематической связи 2-5. При неравномерном натяжении тяговых тросов происходит изменение в показаниях измерительных приборов 8, а при выравнивании усилий в тросовом приводе 3 показания измерительных приборов 8 возвращаются к их исходным значениям. Таким образом обеспечивается одинаковое натяжение тяговых тросов привода системы управления при прямолинейном движении транспортного средства. По завершении регулировки системы управления все ограничители снимаются.
Предложенный способ прост и доступен. Не требует сложной аппаратуры и специальной подготовки водителя. Применение съемных ограничителей с измерительными приборами позволяет их многократно использовать в автохозяйствах на различных транспортных средствах, имеющих тросовый привод в системе управления. Способ позволяет оперативно и с высокой степенью точности осуществлять отладку крестообразной сцепки автопоездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления колесами прицепа-роспуска | 1987 |
|
SU1495193A1 |
| Устройство для управленияпРицЕпОМ-РОСпуСКОМ | 1979 |
|
SU823210A1 |
| Сочлененное транспортное средство | 1985 |
|
SU1288111A1 |
| Устройство для стабилизации движения длиннобазного автопоезда | 1990 |
|
SU1729881A2 |
| Автопоезд для перевозки длинномерных грузов | 1988 |
|
SU1581621A1 |
| Устройство для управления колесами прицепа-роспуска | 1984 |
|
SU1194754A1 |
| Автопоезд | 1975 |
|
SU556066A1 |
| Прицеп автопоезда | 2018 |
|
RU2676402C1 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО ЛЕСОВОЗНОГО АВТОПОЕЗДА | 1973 |
|
SU404685A1 |
| Устройство для управления колесами прицепного звена транспортного средства | 1985 |
|
SU1475850A1 |
Изобретение относится к транспортному машиностроению и касается способов управления транспортными средствами. Цель изобретения: повышение точности и эффективности регулирования тяговых тросов. В способе осуществляют фиксацию взаимного прямолинейного положения звеньев 1, 2 и поворотной тележки 5 ограничителями 6, 7 с последующим выравниванием и контролем усилий в гибких тягах тросового привода 3 натяжными устройствами 4 и измерительными приборами 8, установленными на ограничителях 7. 1 ил.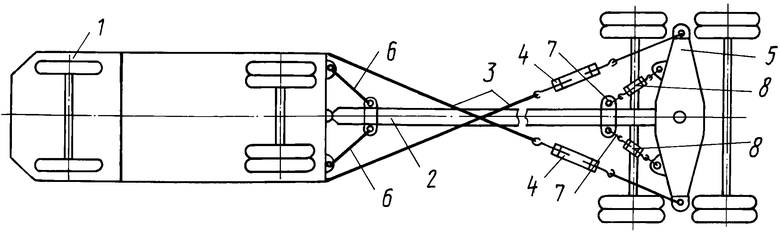
СПОСОБ РЕГУЛИРОВАНИЯ КРЕСТООБРАЗНОЙ СЦЕПКИ ТРАНСПОРТНОГО СРЕДСТВА, состоящего из тягача и связанного с ним посредством тросового привода управления прицепа-роспуска с поворотной тележкой, заключающийся в том, что регулировку натяжения тяговых тросов проводят при положении тягача и прицепа-роспуска, соответствующем прямолинейному движению, отличающийся тем, что установку тягача и прицепа-роспуска в положение, соответствующее прямолинейному движению, проводят путем последовательной установки ограничителей в кинематических связях тягач-прицеп-роспуск, прицеп-роспуск-поворотная тележка, при регулировке натяжения тяговых тросов измерительными приборами осуществляют контроль и выравнивание нагрузок в ограничителях кинематической связи прицеп-роспуск - поворотная тележка, после чего кинематические связи освобождают от ограничителей.
| Кувалдин Б.И | |||
| Прицепной состав лесовозных дорог М.: Лесная промышленность, 1979, с.с.113, 119, рис.29В. |
