Изобретение относится к электротехнике, в частности к преобразовательной технике, и может быть использовано при построении быстродействующих импульсных стабилизаторов напряжения (ИСН) для автономных систем электропитания.
Известен способ стабилизации выходного напряжения ИСН [1], согласно которому стабилизацию выходного напряжения ИСН осуществляют путем измерения выходного напряжения, сравнения его с эталонным напряжением, частотной коррекции полученного сигнала рассогласования изодромным звеном и формирования частотно-скорректированным сигналом рассогласования импульсов управления регулирующим элементом ИСН по принципу широтно-импульсной модуляции (ШИМ).
Наиболее близким к предлагаемому и выбранным в качестве прототипа является способ стабилизации выходного напряжения импульсного стабилизатора [2], согласно которому стабилизацию выходного напряжения быстродействующего импульсного стабилизатора, содержащего индуктивно-емкостный фильтр, регулирующий элемент, широтно-импульсный модулятор (ШИМ), осуществляют путем измерения тока конденсатора фильтра и выходного напряжения, вычисления интеграла суммарного сигнала, формирования импульсов управления регулирующим элементом по принципу ШИМ, сигналом, полученным в результате суммирования инверсных значений сигнала, равного току конденсатора, и сигнала управления по напряжению, взятых соответственно с коэффициентами Ki и Ku, причем
Ki=  ; K
; K =
=  Ki , где L и С - соответственно индуктивность и емкость и емкость индуктивно-емкостного фильтра; UлI - скорость изменения пилообразного напряжения ШИМ; Е - входное напряжение; Т - период, tu - статическая длительность импульса (паузы в случае модуляции переднего фронта импульса).
Ki , где L и С - соответственно индуктивность и емкость и емкость индуктивно-емкостного фильтра; UлI - скорость изменения пилообразного напряжения ШИМ; Е - входное напряжение; Т - период, tu - статическая длительность импульса (паузы в случае модуляции переднего фронта импульса).
Известный способ позволяет достичь более высокого быстродействия стабилизатора.
Целью изобретения является повышение качества выходного напряжения быстродействующего стабилизатора в статических режимах работы. При этом под повышением качества выходного напряжения понимается уменьшение величины статической ошибки.
С этой целью для управления быстродействующим импульсным стабилизатором, содержащим соединенные последовательно между входным и выходным выводами регулирующий элемент и DLC-фильтр, измеряют ток конденсатора DLC-фильтра и выходное напряжение, получают сигнал рассогласования, умножают сигнал, равный измеренному току конденсатора DLC-фильтра, на коэффициент 1/с, умножают сигнал рассогласования на коэффициент К ζ , формируют суммарный сигнал путем суммирования сигналов, полученных в результате умножения, интегрируют суммарный сигнал, формируют сигнал управления по напряжению, умножают сигнал, равный измеренному току конденсатора DLC-фильтра, и сигнал управления по напряжению на коэффициенты Ki и Ku соответственно, суммируют инверсные значения полученных сигналов и формируют результирующим сигналом импульсы управления регулирующим элементом по принципу ШИМ, причем
Ki=  ; K
; K =
=  Ki , где L и С - соответственно индуктивность и емкость DLC-фильтра; Uл' - скорость изменения пилообразного опорного напряжения ШИМ; Е - входное напряжение; Т и tu - соответственно период и статическая длительность импульса управления или паузы при модуляции соответственно заднего или переднего фронта импульса. Кроме того, сигнал рассогласования получают путем сравнения выходного и опорного напряжений, коэффициент Kζвыбирают из условия Kζ < 1 /(RcC + T), где Rc - внутреннее сопротивление конденсатора DLC-фильтра, а сигнал управления по напряжению формируют из указанного интеграла суммарного сигнала, ограничивая диапазон его возможного изменения по значениям максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции.
Ki , где L и С - соответственно индуктивность и емкость DLC-фильтра; Uл' - скорость изменения пилообразного опорного напряжения ШИМ; Е - входное напряжение; Т и tu - соответственно период и статическая длительность импульса управления или паузы при модуляции соответственно заднего или переднего фронта импульса. Кроме того, сигнал рассогласования получают путем сравнения выходного и опорного напряжений, коэффициент Kζвыбирают из условия Kζ < 1 /(RcC + T), где Rc - внутреннее сопротивление конденсатора DLC-фильтра, а сигнал управления по напряжению формируют из указанного интеграла суммарного сигнала, ограничивая диапазон его возможного изменения по значениям максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции.
По предлагаемому способу высокая статическая точность быстродействующего ИСН обеспечивается за счет формирования управляющего сигнала в функции интеграла сигнала рассогласования по напряжению. При этом однако возможно влияние интеграла сигнала рассогласования по напряжению, являющегося дополнительным информационным сигналом, на быстродействующий закон управления ИСН, известный из прототипа.
Влияние интеграла сигнала рассогласования на качество переходных процессов в "малом" можно устранить, выбрав коэффициент усиления сигнала рассогласования Kζ < 1/(RcC + T). Влияние интеграла сигнала рассогласования на качество переходных процессов, при значительных возмущающих воздействиях, вызывающих прерывание модуляции, устраняется за счет ограничения диапазона возможного изменения интеграла суммарного сигнала.
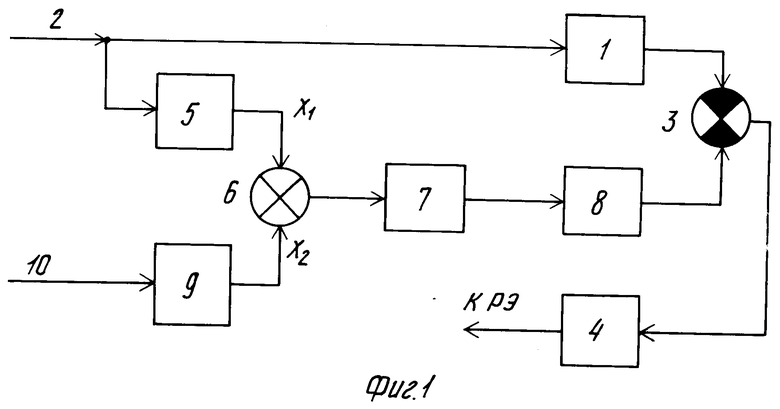
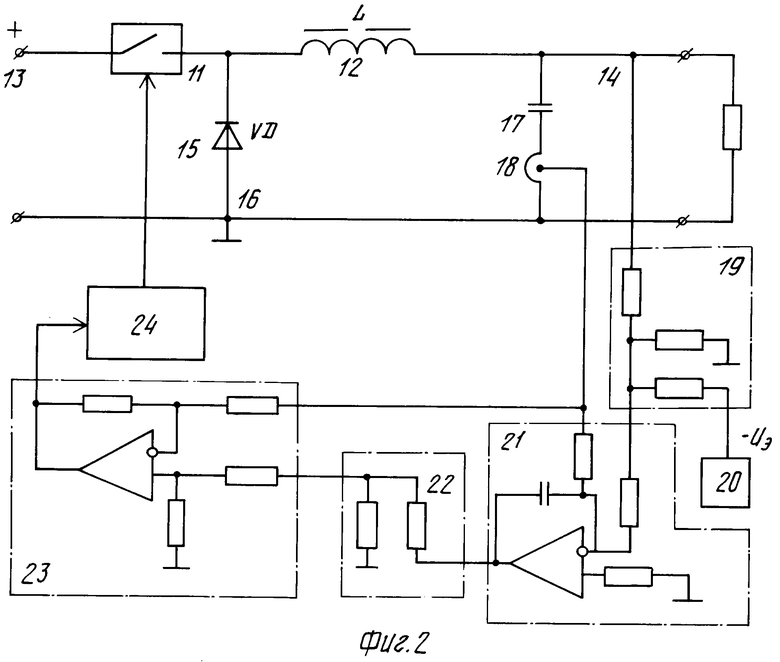
На фиг. 1 приведена схема устройства управления ИСН, поясняющая формирование управляющего сигнала; на фиг. 2 - схема устройства, реализующего предлагаемый способ.
В состав схемы (фиг. 1) входит усилитель 1 с коэффициентом усиления Ki, подключенный входом к информационному входу 2 и выходом через инвертирующий вход первого сумматора 3 к входу ШИМ 4. Второй усилитель 5 с коэффициентом усиления 1/С подключен входом к информационному входу 2, а выходом через второй сумматор 6 и соединенные последовательно интегратор 7 с ограниченным диапазоном изменения выходного сигнала и третий усилитель 8 с коэффициентом усиления Ku к второму инвертирующему входу первого сумматора 3. Четвертый усилитель 9, имеющий коэффициент усиления Kζ , входом подключен к второму информационному входу 10, а выходом - к второму входу второго сумматора 6. Выход ШИМ 4 соединен с управляющим входом регулирующего элемента (РЭ) ИСН.
Определяют величину коэффициента усиления сигнала рассогласования по напряжению Kζ исходя из условия малого влияния сигнала рассогласования в динамических режимах работы ИСН на сигнал управления ИСН. Это условие может быть записано в виде
Х2 < Х1, (1) где Х1 = ΔIc/C; X2 = ΔU˙ Kζ - Δ Ic - приращение тока конденсатора ИСН, вызванное возмущающим воздействием; ΔUc - сигнал рассогласования по напряжению.
При быстродействующем управлении максимальное отклонение выходного напряжения ИСН приходится на момент времени, отстоящий от момента приложения ступенчатого возмущающего воздействия на величину Т, равную периоду преобразования [1]. Следовательно, максимальная величина сигнала рассогласования Δ U определяется
ΔU =  + Rс· ΔIс (2)
+ Rс· ΔIс (2)
Подставив выражение (2) в выражение, определяющее Х2, а значения Х1и Х2 в выражение (1), получают
K + Rс· ΔI
+ Rс· ΔI <
< 
(3) или
Kζ <  . (4)
. (4)
Условие (4) определяет значения Kζ , при которых сохраняется быстродействие и устойчивость ИСН.
При значительных возмущающих воздействиях (коммутация емкостной и активно-емкостной нагрузок), вызывающих прерывание модуляции и значительные отклонения выходного напряжения, интегрирование сигнала рассогласования приводит к существенным отклонениям интеграла суммарного сигнала от установившихся значений и соответственно входного сигнала ШИМ от зоны пилообразного напряжения ШИМ. При этом из-за значительных отклонений интеграла суммарного сигнала и входного сигнала ШИМ модуляция возобновляется не в момент равенства выходного напряжения ИСН стабильному значению, а с запаздыванием, что увеличивает время переходного процесса и ухудшает качество выходного напряжения. Устранить явление запаздывания возобновления модуляции относительно момента равенства выходного напряжения ИСН стабильному значению можно за счет ограничения ширины диапазона возможного изменения интеграла суммарного сигнала, не допуская значительных его отклонений от установившихся значений. При этом длительность переходного процесса уменьшается по мере уменьшения ширины диапазона возможного изменения интеграла суммарного сигнала. С другой стороны, ширина диапазона возможного изменения интеграла суммарного сигнала должна быть достаточной для того, чтобы ограничение изменения интеграла суммарного сигнала не происходило при всех возможных статических и динамических режимах работы стабилизатора, в которых не происходит прерывание модуляции.
Ширина и расположение диапазона возможного изменения интеграла суммарного сигнала по отношению к зоне пилообразного опорного напряжения зависят от параметров ИСН, диапазона изменения входного напряжения, величины выбранного коэффициента Kζ , вида модуляции (передний или задний фронт). Поэтому для определения ширины и расположения диапазона возможного изменения интеграла суммарного сигнала целесообразно проведение моделирования процессов в ИСН на ЦВМ или исследование процессов на макете ИСН по следующей методике. Задают минимальное (по условиям ТЗ) входное напряжения ИСН. Периодически изменяют (коммутируют) активную нагрузку ИСН. Последовательно увеличивают величину коммутируемой нагрузки до момента прерывания модуляции. В этом режиме определяют минимальное и максимальное амплитудные значения интеграла суммарного сигнала. Задают максимальное (по условиям ТЗ) входное напряжение ИСН. Опять периодически изменяют активную нагрузку ИСН, последовательно увеличивают величину коммутируемой нагрузки до момента прерывания модуляции, определяют минимальное и максимальное амплитудные значения интеграла суммарного сигнала. Верхние и нижние границы зоны возможных изменений интеграла суммарного сигнала определяют соответственно наибольшим и наименьшим амплитудными полученными при определении минимального и максимального амплитудных значений интеграла суммарного сигнала. Ограничение диапазона возможного изменения интеграла суммарного сигнала в схеме (фиг. 1) достигается за счет ограниченного диапазона изменения выходного сигнала интегратора 7.
Как пример реализации предлагаемого способа может быть рассмотрена схема, приведенная на фиг. 2. ИСН (фиг. 2) содержит РЭ 11, дроссель 12, включенные последовательно между входом 13 и выходом 14 ИСН. Диод 15 подключен между общей точкой РЭ 11 и дросселем 12 и общим проводом 16 ИСН. Конденсатор 17 и датчик 18 тока соединены последовательно и подключены между выходом 14 и общим проводом 16 ИСН. Измеритель 19 сигнала рассогласования первым входом подключен к выходу 14 ИСН, а вторым входом - к выходу источника 20 эталонного напряжения. Интегратор 21 первым и вторым входами подсоединен соответственно к информационному выходу датчика 18 тока и выходу измерителя 19 сигнала рассогласования, а выходом - к входу делителя 22. Усилитель 23 инвертирующим входом подключен к информационному выходу датчика 18 тока, неинвертирующим выходом - к выходу делителя 22, а выходом - к входу ШИМ с блокирующим RS-триггером 24. Выход последнего соединен с управляющим входом РЭ 11.
Подключение делителя 22 к выходу интегратора 21 обеспечивает выполнение условия ограничения диапазона возможных изменений интеграла суммарного сигнала. При этом используется естественная выходная характеристика операционного усилителя, на котором выполнен интегратор 21. Максимальное Uмакс и минимальное Uмин напряжения диапазона изменения интеграла суммарного сигнала определяются из соотношений
Uмакс = Кд. Uмакс.оу; Uмин = Кд . Uмин.оу, где Кд - коэффициент передачи делителя 22;
Uмакс.оу и Uмин.оу - соответственно максимальное и минимальное возможные напряжения операционного усилителя.
Для подтверждения реализуемости предлагаемого способа был изготовлен макет быстродействующего ИСН в соответствии со схемой (фиг. 2), имеющий выходное напряжение 12 В, минимальное, номинальное, максимальное напряжения 14, 20, 30В, индуктивность фильтра L = 120 мкГ, емкость фильтра С = 800 мкФ, период преобразования Т = 50 мкс.
Коэффициент передачи делителя 22 равен 0,05, что обеспечивает диапазон изменения интеграла суммарного сигнала ± 0,5 В (при диапазоне изменения выходного напряжения интегратора ± 10 В). Пилообразное опорное напряжение ШИМ амплитудой 0,6 В расположено симметрично относительно нулевого уровня напряжения.
Исследования макета ИСН показали, что статическая ошибка во всех режимах работы и температуре ± 20оС не превышает 10 мВ, а при изменении температуры в диапазоне -40+60оС не превышает ± 180 мВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1348796A1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1986 |
|
SU1403037A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| Импульсный стабилизатор напряжения | 1985 |
|
SU1372288A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| Импульсный стабилизатор постоянного напряжения | 1984 |
|
SU1246067A1 |
Использование: в источниках вторичного электропитания при построении быстродействующих импульсных стабилизаторов напряжения (ИСН) для автономных систем электропитания. Сущность изобретения: высокая статическая точность быстродействующего ИСН обеспечивается за счет формирования импульсов управления регулирующим элементом в функции интеграла сигнала рассогласования. Влияние интеграла сигнала рассогласования на качество переходных процессов устранено за счет выбора коэффициента Kζ усиления сигнала рассогласования и за счет ограничения диапазона возможного изменения интеграла суммарного сигнала. Суммарный сигнал формируют путем суммирования сигнала, пропорционального току конденсатора DLC - фильтра и умноженного на коэффициент 1/C, и сигнала рассогласования, умноженного на коэффициент Kζ . 2 ил.
СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ, содержащим соединенные последовательно между входными и выходными выводами регулирующий элемент и DLC - фильтр, заключающийся в том, что измеряют ток конденсатора DLC - фильтра и выходное напряжение, получают сигнал рассогласования, умножают сигнал, равный измеренному току конденсатора DLC - фильтра, на коэффициент 1/C, умножают сигнал рассогласования на коэффициент Kζ , формируют суммарный сигнал путем суммирования сигналов, полученных в результате умножения, интегрируют суммарный сигнал, формируют сигнал управления по напряжению, умножают сигнал, равный измеренному току конденсатора DLC - фильтра, и сигнал управления по напряжению на коэффициенты соответственно Ki и Ku, суммируют инверсные значения полученных сигналов и формируют результирующим сигналом импульсы управления регулирующим элементом по принципу широтно-импульсной модуляции, причем
Ki=  ,
,
K =
=  Ki,
Ki,
где L, C - индуктивность и емкость DLC-фильтра соответственно;
Uп′ - скорость изменения пилообразного опорного напряжения широтно-импульсного модулятора; E - входное напряжение; T, tи - соответственно период и статическая длительность импульса управления или паузы при модуляции соответственно заднего или переднего фронта импульса, отличающийся тем, что, с целью повышения качества выходного напряжения в статических режимах работы импульсного стабилизатора при сохранении его высокого быстродействия, сигнал рассогласования получают путем сравнения выходного и опорного напряжения, коэффициент Kζ выбирают из условия
Kζ < 1 / (RcC+T),
где Rc - внутреннее сопротивление конденсатора DLC - фильтра, а сигнал управления по напряжению формируют из указанного интеграла суммарного сигнала, ограничивая диапазон его возможного изменения по значениям максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1986 |
|
SU1403037A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
