Изобретение относится к области электротехники, в частности к преобразовательной технике, и может быть использовано при построении импульсных стабилизаторов постоянного напряжения (ИСН) с силовой цепью повышающего типа и дискретной обработкой информационных сигналов, имеющих малые длительность переходных процессов и статическую ошибку стабилизации выходного напряжения.
Известен [1] способ управления ИСН, выполненным в виде управляемого электрического ключа (УЭК) и DLC-фильтра (индуктивно-емкостного фильтра с замыкающим диодом), соединенных последовательно между входом и выходом ИСН, заключающийся в том, что измеряют ток IC конденсатора DLC-фильтра и напряжение Uвых на выходе ИСН, вычисляют напряжение UC.н на емкости конденсатора DLC-фильтра путем интегрирования сигнала, полученного суммированием тока конденсатора, взятого с коэффициентом 1/С, где С - емкость конденсатора DLC-фильтра, и сигнала отклонения напряжения UC.н от Uвых, взятого с коэффициентом К0=(0,05÷0,0005)/(RC·C), где RC - внутреннее активное сопротивление конденсатора DLC-фильтра, формируют сигнал рассогласования ε по напряжению путем сравнения напряжения СC.н с эталонным напряжением Uэт, умножают ток IC и сигнал рассогласования ε на коэффициенты KI1 и КU1 соответственно, причем
 ;
;
 ,
,
где L - индуктивность DLС-фильтра, Uвх - напряжение на входе ИСН, tи - статическая длительность импульса управления УЭК, Т - период преобразования и νл - скорость изменения пилообразного напряжения широтно-импульсного модулятора (ШИМ), формируют сигнал управления, суммируя сигналы, полученные в результате умножения, и сигналом управления формируют импульсы управления УЭК по принципу ШИМ с блокировкой модулятора в момент формирования модулируемого фронта импульса.
Этот способ обеспечивает ИСН с силовой цепью понижающего типа (ИСН ПН), малую длительность переходных процессов при воздействиях по выходу (изменение тока нагрузки Iн) и по входу (изменение напряжения Uвх на входе ИСН).
К недостаткам этого способа относится то, что он не обеспечивает высокой статической точности стабилизации напряжения Uвых, поскольку сигнал рассогласования 8 по напряжению умножается на коэффициент KU1, величина которого, определяемая через параметры ИСН, относительно мала и не может быть увеличена без ухудшения динамических характеристик ИСН. Кроме того, этот способ неприменим непосредственно для стабилизации выходного напряжения ИСН с силовой цепью повышающего типа (ИСН ПВ), содержащего дроссель и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя с диодом, и конденсатор, включенный между выходом и общим проводом стабилизатора.
Известен [2] способ управления ИСН ПВ, заключающийся в измерении выходного напряжения на интервале включенного состояния УЭК, запоминании выходного напряжения на момент окончания интервала включенного состояния УЭК, получении сигнала рассогласования по напряжению путем сравнения запомненного значения выходного напряжения и эталонного напряжения и формировании сигналом рассогласования по напряжению импульсов управления УЭК по принципу ШИМ. Этот способ позволяет обеспечить ИСН ПВ высокую статическую точность стабилизации выходного напряжения, но не обеспечивает малой длительности переходных процессов.
Известен способ управления ИСН ПН [3], согласно которому измеряют ток IC(t) конденсатора DZC-фильтра и напряжение Uвых на выходе стабилизатора, получают сигнал рассогласования по напряжению ε(t), вычитая эталонное напряжение Uэт из Uвых(t), получают первый сигнал, умножая сигнал рассогласования по напряжению ε(t) на коэффициент Кр<1/(RCC+T), где RC и С - соответственно внутреннее активное сопротивление и емкость конденсатора DLC-фильтра, получают сигнал «ток конденсатора», считая его равным току IC(t) конденсатора DLC-фильтра, умножают сигнал «ток конденсатора» на коэффициент 1/С и, суммируя с первым сигналом, получают второй сигнал, интегрируют второй сигнал, причем диапазон возможного изменения интеграла второго сигнала ограничивают по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают третий сигнал, считая его равным интегралу второго сигнала, получают сигнал управления, умножая сигнал «ток конденсатора» и третий сигнал на коэффициенты КI1 и КU1 соответственно и суммируя инверсные значения сигналов, полученных в результате умножения, формируют сигналом управления импульсы управления УЭК по принципу ШИМ с блокировкой модулятора в момент формирования модулируемого фронта импульса. При этом KI1 и KI1 соответствуют КI1 и КU1 из [1].
Этот способ позволяет обеспечить ИСН ПН малую длительность переходных процессов в динамических режимах работы и малую величину статической ошибки выходного напряжения. Однако при его использовании для управления ИСН ПВ не достигается малая длительность переходных процессов в динамических режимах работы из-за различия силовых цепей ИСН ПН и ИСН ПВ.
В известных ИСН ПВ, как правило, решают задачи уменьшения или величины статической ошибки выходного напряжения, или длительности переходных процессов. Однако существуют области техники, в которых от ИСН ПВ требуются как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения. Например, такие требования к ИСН ПВ предъявляются при их использовании в системах электропитания космических аппаратов. Обеспечить в ИСН малую длительность переходных процессов и малую статическую ошибку выходного напряжения достаточно сложно, так как увеличение коэффициента усиления сигнала рассогласования по напряжению или интегрирование этого сигнала позволяет уменьшить статическую ошибку выходного напряжения, но, как правило, приводит к увеличению длительности переходных процессов в динамических режимах работы ИСН. В известном решении [3] обеспечивается как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения. Однако это решение применимо к ИСН ПН и при его использовании в ИСН ПВ не обеспечивает малой длительности переходных процессов из-за различия силовых цепей ИСН.
В качестве прототипа выбран способ управления ИСН с ШИМ [4], согласно которому в импульсном стабилизаторе, содержащем дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, измеряют напряжение Uвых на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент Кр, интегрируют второй сигнал, путем прерывания интегрирования ограничивают диапазон изменения интеграла второго сигнала по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают суммарный сигнал, умножая сигнал «ток конденсатора» и третий сигнал на коэффициенты КI и КU соответственно и суммируя инверсные значения сигналов, полученных в результате умножения, управляющим сигналом формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, согласно изобретению дополнительно измеряют входное напряжение Uвх, токи дросселя IL и нагрузки Iн вычисляют сигнал «ток конденсатора» IC=IL-Iн·Uвых/Uвх, получают третий сигнал, интегрируя четвертый сигнал, вычисляемый путем вычитания из сигнала «ток конденсатора» самого третьего сигнала, взятого с коэффициентом К0<<1/T, где Т - период преобразования, второй сигнал принимают равным первому, результирующий сигнал получают, вычитая интеграл второго сигнала из суммарного сигнала, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом KI=2,4·L·Uл(T)/(Uвых·T); КU=KI/T; Kp<4·KI·C·Uвых/[Uвх·T(2RС·C+T)], где RС - внутреннее активное сопротивление конденсатора, формируют нелинейное опорное напряжение модулятора Uл(t)=2,4·Uл(T)·(t2/4·T2+t3/6·T3), где 0<t<T, Uл(T) - амплитудное значение нелинейного опорного напряжения модулятора.
В известном решении [4] обеспечивается как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения применительно к ИСН ПВ. В то же время реализация такого решения на аналоговых элементах затруднительна как в проектировании, так и в производстве. Структурные схемы выпускаемых промышленностью специализированных интегральных схем существенно отличаются от структуры устройства управления, реализующего решение [4]. Аппаратная реализация закона управления на подобных микросхемах вызывает применение большого количества внешних элементов, что влечет за собой усложнение и снижение надежности устройства управления. Поэтому возникает необходимость разработки новых решений, позволяющих осуществить переход на микроэлектронную элементную базу при одновременном сохранении малых длительности переходных процессов и статической ошибки выходного напряжения ИСН.
В основу изобретения положена задача повышения качества выходного напряжения ИСН ПВ в динамических и статических режимах его работы при дискретной обработке его информационных сигналов, позволяющей обеспечить практическую реализацию ИСН с устройством управления на основе микроконтроллерной техники. При этом под повышением качества выходного напряжения в динамических режимах понимается уменьшение длительности переходных процессов, а в статических режимах - обеспечение астатизма выходного напряжения.
Поставленная задача решается тем, что в способе управления импульсным стабилизатором, содержащим дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, заключающийся в том, что измеряют напряжения Uвых на выходе и Uвх на входе стабилизатора, токи дросселя IL и нагрузки Iн вычисляют сигнал «ток конденсатора» IC=IK-Iн·Uвых/Uвх, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, вычисляют первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент Кр, где Kp<4·KI·C·Uвых/[Uвх·T(2·RСC+T)], RC - внутреннее активное сопротивление конденсатора, сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции, согласно изобретению измерение напряжений Uвых и Uвх на выходе и входе стабилизатора, токов дросселя IL и нагрузки Iн производят на каждом периоде преобразования в фиксированные моменты времени (mТ+τ), где m = 0, 1, 2, 3,…, τ - в общем случае произвольно выбранный фиксированный интервал времени |τ|<Т, одинаково удаленный от начала каждого периода преобразования Т, производят запоминание измеренных значений напряжений Uвых и Uвх на выходе и входе стабилизатора, токов дросселя IL и нагрузки Iн; вычисление первого сигнала Крε(mТ+τ) производят в моменты времени (mТ+τ), получают второй сигнал, вычитая из значения сигнала «ток конденсатора» IC(mT+τ) значение сигнала «ток конденсатора» IC((m-1)T+τ), запомненное на предшествующем периоде, производят запоминание значения сигнала «ток конденсатора», полученное на текущем периоде преобразования, вычисляют третий сигнал U3, умножая второй сигнал на коэффициент K1=L·Uл/(Uвых·T), где Uл - амплитудное значение пилообразного линейного опорного сигнала широтно-импульсного модулятора, запоминают значение третьего сигнала, вычисляют четвертый сигнал U4(mT+τ)=2U3(mТ+τ)-U3((m-1)T+τ), запоминают четвертый сигнал, вычисляют пятый сигнал U5(mT+τ)=U4(mT+τ)+U5((m-1)T+τ), вычисляют шестой сигнал  , формируют сигнал управления, суммируя пятый и шестой сигналы.
, формируют сигнал управления, суммируя пятый и шестой сигналы.
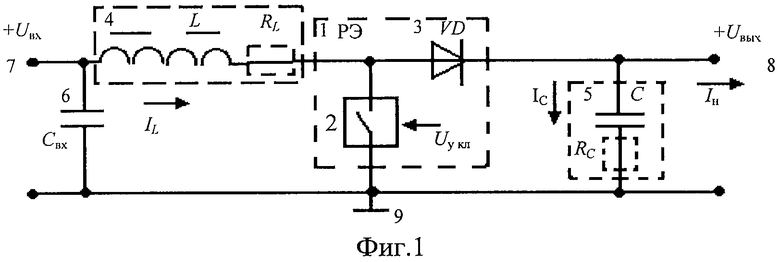
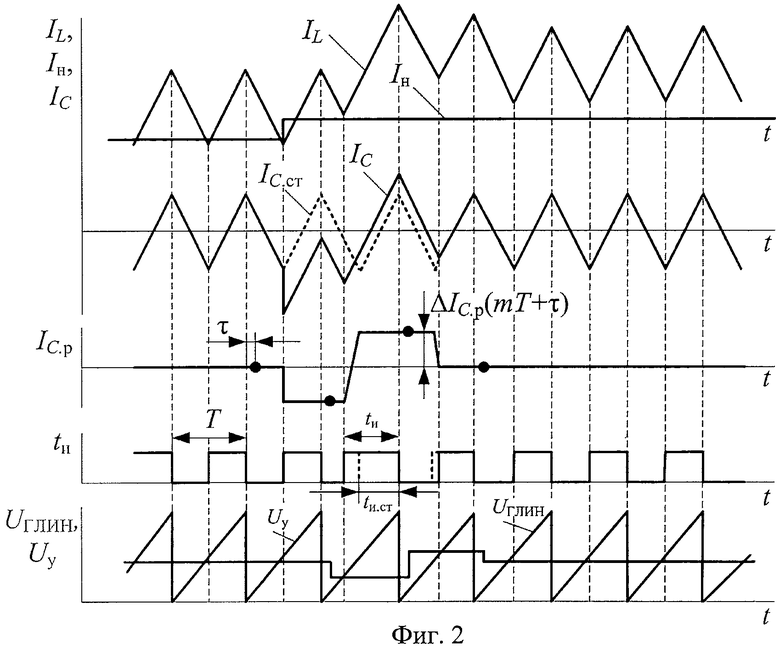
На фиг.1 приведена силовая цепь ИСН ПВ. На фиг.2 приведены временные диаграммы напряжений и токов элементов силовой цепи ИСН ПВ. На фиг.3 приведена структурная схема устройства управления ИСН ПВ. На фиг.4-9 приведены временные диаграммы выходного напряжения, тока дросселя и тока нагрузки ИСН ПВ, подтверждающие решение поставленной задачи.
Силовая цепь ИСН ПВ (фиг.1) содержит регулирующий элемент 1, состоящий из УЭК 2 и диода 3, дроссель 4, конденсатор 5, входной конденсатор 6, вход 7, выход 8, общий провод 9.
Приведенные на фиг.2 временные диаграммы токов и напряжений элементов силовой цепи ИСН и тока нагрузки необходимы для понимания понятий «регулируемая составляющая» и «сигнал «ток конденсатора» и пояснения изменения токов и напряжений элементов силовой цепи ИСН при работе стабилизатора. На временных диаграммах приведены: IL - ток дросселя; Iн - ток нагрузки; IC - сигнал «ток конденсатора»; IС.ст - стационарная составляющая сигнала «ток конденсатора»; IС.р - стационарная составляющая сигнала «ток конденсатора»; Uу - управляющий сигнал ШИМ; UГЛИН - опорный сигнал ШИМ; tи - сигнал управления силовым ключом ИСН ПВ с выделением из него стационарной tи.ст и регулируемой tи.р составляющих.
Для доказательства решения поставленной выше задачи посредством предлагаемого способа управления, в частности, обеспечения высокого качества выходного напряжения ИСН ПВ, воспользуемся подходом, изложенным в [5], где осуществлен синтез закона управления, обеспечивающего минимальную конечную длительность переходных процессов в ИСН с ШИМ и силовой цепью понижающего типа. Закон управления синтезирован случая малых отклонений длительности импульса управления силовым ключом ИСН

где Т - период преобразования. Он заключается в приведении системы с широтно-импульсной модуляцией (ШИМ) к системе с амплитудно-импульсной модуляцией (АИМ), синтезе последовательного корректирующего устройства с использованием третьего полиномиального уравнения синтеза [6] и обратного перехода от системы с АИМ к системе с ШИМ, учитывающего специфику, вносимую ШИМ. Применение при синтезе третьего полиномиального уравнения позволяет достичь минимальной конечной длительности переходных процессов при наличии отклонения параметров корректирующего устройства и силовой цепи ИСН от номинальных. Сам синтез осуществляется по регулируемым составляющим переменных состояния, под которыми понимают отклонения переменных состояния от их значений в стационарном режиме.
В [5] для такого ИСН также найден вариант реализации этого закона управления, при котором используются только дискретные значения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра ИСН. Согласно этому варианту реализации регулируемая составляющая входного сигнала широтно-импульсного модулятора имеет вид:

где d0=LC/Т, L и С - индуктивность и емкость выходного фильтра ИСН, Т - период преобразования, Uвх - напряжение на входе ИСН, Км=Δtи.у/Δу(mT)=T/Um, Δtи.у - приращение длительности импульса управления силовым ключом ИСН относительно моментов времени mТ управляемого переключения, UС.p(mT) - дискретные значения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра, Um - амплитуда пилообразного напряжения ШИМ.
Определить регулируемую составляющую напряжения UС.p на емкости конденсатора выходного фильтра ИСН, входящую в (2) путем проведения вычислительных операций с дискретными или непрерывными значениями выходного напряжения Uвых стабилизатора не представляется возможным. Это объясняется тем, что схема замещения конденсатора выходного фильтра ИСН может быть представлена в виде последовательно включенных емкости Сф конденсатора и его внутреннего активного сопротивления RС. Поэтому в выходном напряжении ИСН - напряжении на конденсаторе выходного фильтра ИСН кроме напряжения UС на емкости конденсатора присутствует напряжение URC на внутреннем активном сопротивлении RC конденсатора. Поскольку внутреннее активное сопротивление RC конденсатора подвержено значительным изменениям под действием температурного и временного факторов, то и напряжение URC также будет изменяться, а следовательно, определить напряжение на емкости UC, например, путем вычитания неопределенного напряжения URC из выходного напряжения Uвых не представляется возможным.
Вычислить регулируемую составляющую напряжения UС.p на емкости конденсатора выходного фильтра ИСН понижающего типа можно путем интегрирования тока этого конденсатора. Для ИСН повышающего типа такое решение неприменимо, поскольку в отличие от ИСН понижающего типа, в процессе функционирования ИСН повышающего типа связь между дросселем и конденсатором его выходного фильтра периодически разрывается на интервалах непроводящего состояния диода. Поэтому при отклонении длительности импульсов управления от стационарной в конденсатор выходного фильтра ИСН повышающего типа передается не только регулируемая, но и часть стационарной составляющей тока дросселя, которая для цели формирования управляющего сигнала является информационной помехой. Для исключения такой информационной помехи можно использовать решение, примененное в [4], согласно которому вместо фактического тока конденсатора ИСН используется информационный сигнал «ток конденсатора», вычисляемый по выражению

где IL - ток дросселя силовой цепи ИСН, Iн - ток нагрузки ИСН, Uвых - напряжение на выходе ИСН, Uвх - напряжение на входе ИСН.
Умножение тока нагрузки на коэффициент Uвых/Uвх приводит уровень тока нагрузки к уровню постоянной составляющей тока дросселя. Поэтому, согласно (3), информационный сигнал «ток конденсатора» не содержит постоянной составляющей, т.е. подобен току конденсатора ИСН понижающего типа, и интегрирование этого тока позволяет вычислить регулируемую составляющую напряжения UС.p на конденсаторе выходного фильтра, входящую в (2).
Регулируемая составляющая напряжения, воздействующая на дроссель ИСН, вычисляется как разность напряжений на дроселе на этапах проводящего и непроводящего состояний силового ключа. Для ИСН понижающего типа регулируемая составляющая напряжения на дросселе, входящая в (2), равна Uвх - напряжению на входе ИСН, а для ИСН повышающего типа регулируемая составляющея напряжения на дросселе равна Uвых - напряжению на выходе ИСН. Поэтому закон изменения регулируемой составляющей входного сигнала широтно-импульсного модулятора в ИСН повышающего типа по дискретным значениям регулируемой составляющей напряжения на емкости конденсатора выходного фильтра может быть получен из (2) заменой Uвх на Uвых:

Текущие дискретные значения входного сигнала широтно-импульсного модулятора, определяющие длительность импульса управления на периоде Т, составляющем интервал времени от mТ до (m+1)T, согласно [5] определяются как

При практической реализации ИСН нежелательно совпадение моментов коммутации времени mТ силового ключа и моментов выборки информационных сигналов, поскольку в моменты коммутации (на интервалах коммутации) силового ключа происходят изменения токов в силовых цепях ИСН с высокими скоростями и генерируются возмущения электромагнитного поля, приводящие к искажениям значений информационных сигналов при их измерении из-за электромагнитных «наводок» в измерительных цепях. Поэтому моменты измерения и фиксации дискретных значений информационных сигналов желательно сместить на некоторый интервал времени τ, где τ - в общем случае произвольно выбранный фиксированный интервал времени |τ|<Т (см. фиг.2). Для того чтобы располагать временем для проведения вычислительных процедур, необходимых для определения входного сигнала широтно-импульсного модулятора к моменту формирования регулируемого фронта переключения силового ключа, целесообразно τ выбирать так, чтобы моменты времени (mТ+τ) максимально удалить от моментов регулируемого переключения силового ключа ИСН. Для ИСН ПВ и при модуляции переднего фронта импульса моменты времени (mT+τ) следует выбрать непосредственно после момента выключения силового ключа ИСН, т.е. τ<<Т.
С учетом вышеизложенного выражения (4) и (5) можно переписать в виде

и

Вычислить приращение за период Т регулируемой составляющей напряжения ΔUC.р на емкости конденсатора можно путем интегрирования на интервале времени, равном периоду Т, приращения регулируемой составляющей ΔIС.р тока конденсатора

Поскольку приращение регулируемой составляющей сигнала «ток конденсатора» на интервале между регулируемыми моментами времени mТ переключения силового ключа ИСН остается неизменной (фиг.2), то для его определения достаточно вычислить первую разность сигнала «ток конденсатора»
ΔIС.р(mT)=IС.р(mT)-IС.р((m-1)T)
или с учетом сдвига на величину τ

Поскольку значения первой разности сигнала «ток конденсатора» на интервале между регулируемыми моментами переключения силового ключа ИСН постоянны, то (8), с учетом сдвига на интервал τ, можно записать в виде:

Определить дискретные значения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра можно по выражению

Таким образом, замена процедуры интегрирования согласно (8) определением площади прямоугольника согласно (10) позволяет определить приращение регулируемой составляющей напряжения на емкости конденсатора ΔUС.р(mT+τ) и саму регулируемую составляющую напряжения UС.p(mT+τ) в окрестности момента времени mТ+τ, т.е. раньше момента времени в который формируется регулируемый фронт импульса управления силовым ключом. Соответственно и вычисление входного сигнала широтно-импульсного модулятора с использованием (6) и (7) также может быть произведено в окрестности момента времени mТ+τ, т.е. ранее момента регулируемого переключения силового ключа.
На фиг.3 приведена структурная схема устройства управления, реализующего дискретный закон (2) формирования входного сигнала ШИМ.
Устройства выборки и хранения УВХ1-УВХ4 обеспечивают выборку входных сигналов в моменты времени (mT+τ) и хранение выбранных значений сигналов на последующих интервалах времени длительностью в период преобразования Т. Измеритель первой разности ИПР обеспечивает выполнение (9), вычислитель В1 производит вычисления согласно (10) и (11), а вычислители В2 и В3 - согласно (4) и (5) соответственно.
Для обеспечения астатизма выходного напряжения ИСН используется способ, аналогичный применяемому в прототипе [4], согласно которому входной сигнала Uу ШИМ формируется как сумма динамического сигнала управления Uу.д и сигнала Uу.ст, задающего статический уровень выходного напряжения. Сигнал Uу.ст вычисляется как интеграл сигнала рассогласования по напряжению, взятый с некоторым коэффициентом Кр, причем величина этого коэффициента выбирается достаточно малой, чтобы на интервале переходного процесса приращение сигнал Uу.ст был много меньше приращения динамического сигнала управления Uу.д. Это исключает влияние сигнала Uу.ст на динамические характеристики ИСН. В предлагаемом решении с дискретным способом формирования входного сигнала модулятора процедура интегрирования заменяется процедурой суммирования дискретных значений сигнала рассогласования ε(kT), и сигнал Uу.ст вычисляется посредством вычислителя В4 согласно выражению:

где ε{kT)=Uвых(mT)-U0 - дискретные значения сигнала рассогласования по напряжению, U0 - эталонное напряжение, а l = Т, 2T, 3T, …
Для подтверждения работоспособности ИСН с дискретным способом формирования входного сигнала модулятора разработана модель ИСН ПВ в формате Spice. Модель устройства управления выполнена в соответствие со структурной схемой, приведенной на фиг.3 с использованием аналоговых устройств, имитирующих цифровую обработку поступающей информации. Модель силовой цепи ИСН имеет следующие параметры: индуктивность дросселя L=150 мкГн, емкость конденсатора выходного фильтра С=1000 мкФ, период преобразования Т=25 мкс, выходное напряжение Uвых=100 В. Выборка информационных сигналов производится в моменты времени mТ+τ, где τ=1 мкс. Вычислительные процедуры в модели, по длительности занимающие 1 мкс, производятся сразу после выборки информационных сигналов в соответствие со структурной схемой устройства управления (фиг.3).
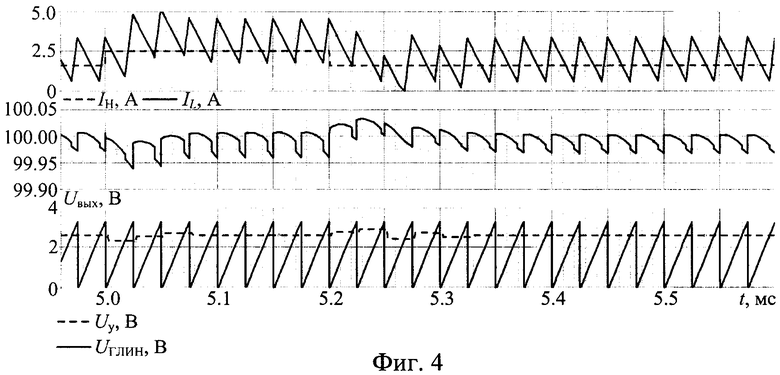
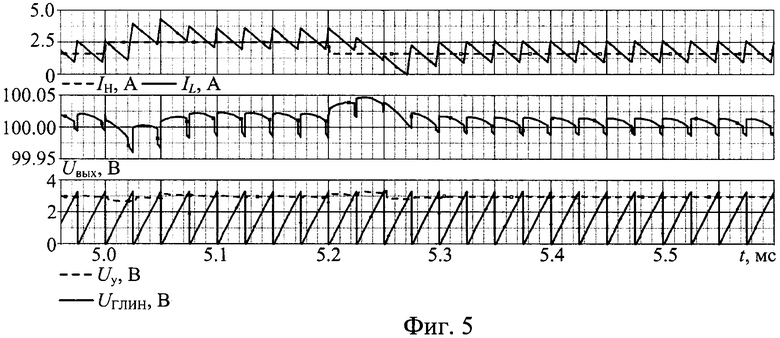
Коммутация нагрузки может происходить в произвольные моменты времени относительно начала периода преобразования T. Поэтому точность вычисления приращения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра ИСН будет зависеть от момента коммутации нагрузки. На фиг.4, фиг.5 приведены временные диаграммы токов нагрузки Iн и дросселя IL, выходного напряжения Uвых, входного и опорного напряжений ШИМ, для случая, когда ступенчатое изменение тока нагрузки приводит к изменению длительности импульса управления, не нарушающего условие (1). Диаграммы отличаются уровнем входного напряжения ИСН: на фиг.4 Uвх=80 В, на фиг.5 Uвх=90 В.
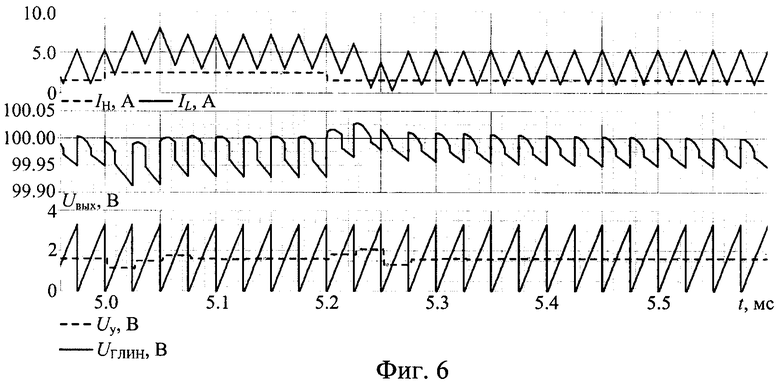
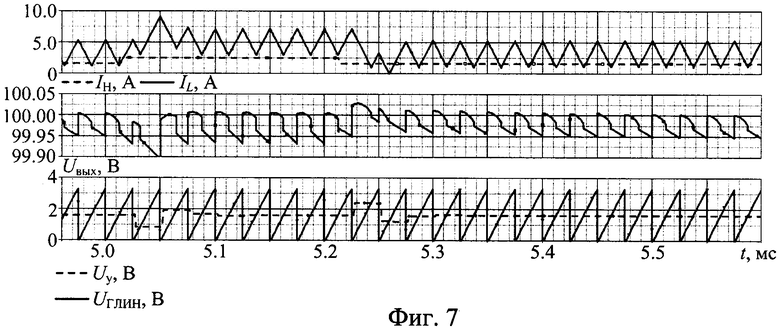
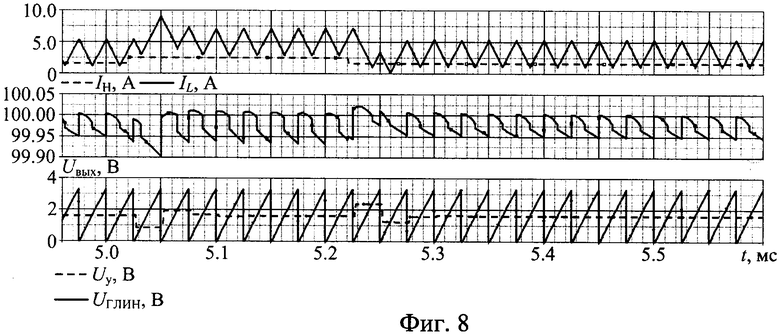
На фиг.6-8 приведены временные диаграммы токов нагрузки Iн и дросселя IL, выходного напряжения Uвых, входного и опорного напряжений ШИМ, для Uвх=50 В при различных моментах коммутации нагрузки, когда ступенчатое изменение тока нагрузки приводит к изменению длительности импульса управления, не нарушающего условие (1). Так, коммутация нагрузки непосредственно после начала периода преобразования (фиг.6) приводит к равенству значений регулируемой составляющей напряжения на емкости конденсатора, получаемой при расчете по формулам (8) и (10). В случае коммутации нагрузки в середине или конце периода преобразования (фиг.7, 8) регулируемая составляющей напряжения на емкости конденсатора, полученная по (10), не совпадает со значением регулируемой составляющей, полученной по (8). Это приводит к неточному формированию длительности импульса управления силовым ключом, что выражается в увеличении длительности переходного процесса до 3-5 периодов преобразования и амплитуды отклонения выходного напряжения ИСН. Достижение длительности переходного процесса в 3-5 периодов преобразования следует из возврата тока дросселя, выходного напряжения и входного сигнала широтно-импульсного модулятора к стационарным значениям через 3-5 периодов преобразования после момента коммутации тока.
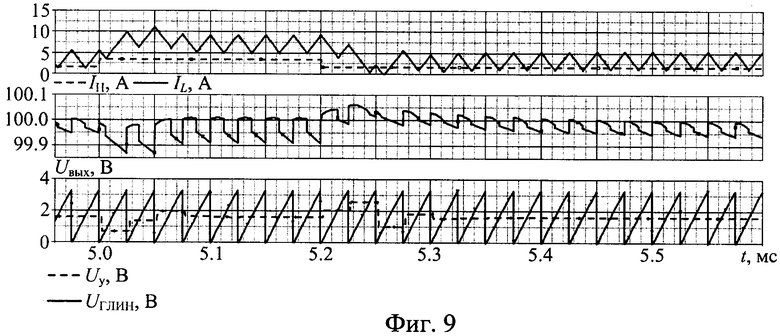
На фиг.9 приведены временные диаграммы для случая ступенчатого изменения тока нагрузки большего значения, приводящего к нарушению условия (1). В этом случае длительность переходного процесса несколько возрастает, но остается конечной.
Исследование процессов в модели ИСН показали работоспособность ИСН с предложенным устройством управления и достижение минимальной конечной длительности переходных процессов в 3-4 периода преобразования при ступенчатом изменении тока нагрузки, не нарушающем условие (1). При значительной величине коммутируемой составляющей тока нагрузки происходит увеличение длительности переходного процесса до 3-5 периодов преобразования, однако сохраняется конечный характер переходного процесса, что объясняется применением для синтеза закона управления третьего полиномиального уравнения и адекватном переходе от системы с АИМ к системе с ШИМ.
Необходимость однократного, в течение периода Т, проведения процедуры оцифровывания и вычислительных операций освобождает существенный временной интервал в работе цифрового вычислительного устройства, который может быть использован для диагностики ИСН, решения задач по распределению тока нагрузки между отдельными ИСН при их параллельной работе на общую нагрузку, что является дополнительным преимуществом предложенного способа управления ИСН.
ЛИТЕРАТУРА
1. А.с. СССР №1403037, кл. G05F 1/56. Способ стабилизации выходного напряжения импульсного стабилизатора/ В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 15.06.88, Бюл. №22.
2. А.с. СССР №440659, кл. G05F 1/56. Стабилизатор постоянного напряжения/ Ю.А.Мордвинов и П.П.Гурский. - Опубл. 15.10.92, Бюл. №38.
3. Патент РФ №2025764, кл. G05F 1/56. Способ управления импульсным стабилизатором/ В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 30.12.94, Бюл. №24.
4. Патент РФ №2238583, кл. G05F 1/56. Способ управления импульсным стабилизатором / Ю.В.Краснобаев, И.В.Алатов, Ю.А.Вторушин, Б.Н.Мамлин. - Опубл. 20.10.2004, Бюл. №34.
5. Соустин Б.П., Иванчура В.И., Чернышев А.И., Исляев Ш.Н. Системы электропитания космических аппаратов. - Новосибирск: Наука. Сибирская издательская фирма, 1994. - 318 с.
6. Цыпкин Я.З. Теория линейных импульсных систем.- М.: Физматгиз, 1963. - 968 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| Способ управления зарядным устройством с импульсным принципом действия | 2023 |
|
RU2813604C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1348796A1 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ КОММУТАЦИОННЫХ ПЕРЕНАПРЯЖЕНИЙ | 2005 |
|
RU2309534C1 |
Изобретение относится к области электротехники, в частности к преобразовательной технике, и может быть использовано при построении импульсных стабилизаторов постоянного напряжения (ИСН) с силовой цепью повышающего типа и дискретной обработкой информационных сигналов, имеющих малые длительность переходных процессов и статическую ошибку стабилизации выходного напряжения. Технический результат - повышение качества выходного напряжения импульсного стабилизатора постоянного напряжения с силовой цепью повышающего типа. Для чего измерение напряжений на выходе Uвых и входе Uвx ИСН, токов дросселя il и нагрузки Iн ИСН производят на каждом периоде преобразования в фиксированные моменты времени (mТ+τ). Производят запоминание измеренных значений напряжений Uвых и Uвx, токов i2 и Iн. Вычисляют сигнал «ток конденсатора» IC=IL-Iн·Uвых/Uвх и сигнал рассогласования ε=Uвых-Uвx, где Uэт - эталонное напряжение. Из значения сигнала «ток конденсатора» IC(mТ+τ) вычитается значение сигнала «ток конденсатора» IC((m-1)Т+τ), запомненное на предшествующем периоде, и запоминается значение сигнала «ток конденсатора», полученное на текущем периоде преобразования. Сигнал рассогласования 6 усиливают в КP раз и производят его конечно-разностное суммирование. Сигнал «ток конденсатора» подвергается частотной коррекции и в сумме с сигналом рассогласования подается на вход широтно-импульсного модулятора. 9 ил.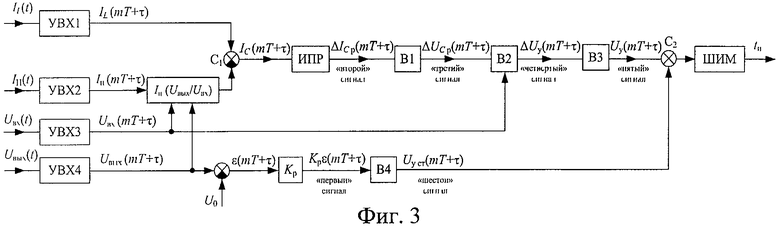
Способ управления импульсным стабилизатором, содержащим дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, заключающийся в том, что измеряют напряжения Uвых на выходе и Uвx на входе стабилизатора, токи дросселя IL и нагрузки Iн, вычисляют сигнал «ток конденсатора» IC=IL-Iн·Uвых/Uвх, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, вычисляют первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент Кp, где Kp<4·KI·C·Uвых[Uвx·T(2·RС·C+T)], RС - внутреннее активное сопротивление конденсатора, сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции, отличающийся тем, что измерение напряжений Uвых и Uвx на выходе и входе стабилизатора, токов дросселя IL и нагрузки Iн производят на каждом периоде преобразования в фиксированные моменты времени (mТ+τ), где τ=0, 1, 2, 3, …, τ - в общем случае произвольно выбранный фиксированный интервал времени |τ|<Т, одинаково удаленный от начала каждого периода преобразования Т, производят запоминание измеренных значений напряжений Uвых и Uвx на выходе и входе стабилизатора, токов дросселя IL и нагрузки Iн, вычисление первого сигнала Крε(mТ+τ) производят в моменты времени (mТ+τ), получают второй сигнал, вычитая из значения сигнала «ток конденсатора» IC(mТ+τ) значение сигнала «ток конденсатора» IC((m-1)Т+τ), запомненное на предшествующем периоде, производят запоминание значения сигнала «ток конденсатора», полученное на текущем периоде преобразования, вычисляют третий сигнал U3, умножая второй сигнал на коэффициент K1=L·Uл/(Uвых·T), где Uл - амплитудное значение пилообразного линейного опорного сигнала широтно-импульсного модулятора, запоминают значение третьего сигнала, вычисляют четвертый сигнал U4(mТ+τ)=2U3(mТ+τ)-U3((m-1)Т+τ), запоминают четвертый сигнал, вычисляют пятый сигнал U5(mT+τ)=U4(mT+τ)+U5((m-1)T+τ), вычисляют шестой сигнал  , формируют сигнал управления, суммируя пятый и шестой сигналы.
, формируют сигнал управления, суммируя пятый и шестой сигналы.
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| EP 0658969 A2, 21.06.1995 | |||
| Гимнастическая лестница | 1990 |
|
SU1747096A1 |

