Изобретение относится к области электротехники, в частности к преобразовательной технике, и может быть использовано при построении импульсных стабилизаторов постоянного напряжения (ИСН) с силовой цепью повышающего типа, имеющих малые длительность переходных процессов и статическую ошибку стабилизации выходного напряжения.
Известен [1] способ управления ИСН, выполненный в виде управляемого электрического ключа (УЭК) и DLC-фильтра (индуктивно-емкостного фильтра с замыкающим диодом), соединенных последовательно между входом и выходом ИСН, заключающийся в том, что измеряют ток IC конденсатора DLC-фильтра и напряжение Uвых на выходе ИСН, вычисляют напряжение UС.Н на емкости конденсатора DLC-фильтра путем интегрирования сигнала, полученного суммированием тока конденсатора, взятого с коэффициентом 1/С, где С - емкость конденсатора DLC-фильтра, и сигнала отклонения напряжения UС.Н от Uвых, взятого с коэффициентом К0=(0,05-0,0005)/(RС·C), где RС - внутреннее активное сопротивление конденсатора DLC-фильтра, формируют сигнал рассогласования (по напряжению путем сравнения напряжения UС.Н с эталонным напряжением UЭТ, умножают ток IC и сигнал рассогласования (на коэффициенты KI1 и KU1, соответственно, причем
где L - индуктивность DLC-фильтра, UВХ - напряжение на входе ИСН, tИ - статическая длительность импульса управления УЭК, Т – период преобразования и ν Л - скорость изменения пилообразного напряжения широтно-импульсного модулятора (ШИМ), формируют сигнал управления, суммируя сигналы, полученные в результате умножения, и сигналом управления формируют импульсы управления УЭК по принципу ШИМ с блокировкой модулятора в момент формирования модулируемого фронта импульса.
Этот способ обеспечивает ИСН с силовой цепью понижающего типа (ИСН ПН), малую длительность переходных процессов при воздействиях по выходу (изменение тока IH нагрузки) и по входу (изменение напряжения UВХ на входе ИСН).
К недостаткам этого способа относится то, что он не обеспечивает высокой статической точности стабилизации напряжения UВЫХ, поскольку сигнал рассогласования ε по напряжению умножается на коэффициент KU1, величина которого, определяемая через параметры ИСН, относительно мала и не может быть увеличена без ухудшения динамических характеристик ИСН. Кроме того, этот способ не применим непосредственно для стабилизации выходного напряжения ИСН с силовой цепью повышающего типа (ИСН ПВ), содержащего дроссель и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя с диодом и конденсатор, включенный между выходом и общим проводом стабилизатора.
Известен [2] способ управления ИСН ПВ, заключающийся в измерении выходного напряжения на интервале включенного состояния УЭК, запоминании выходного напряжения на момент окончания интервала включенного состояния УЭК, получении сигнала рассогласования по напряжению путем сравнения запомненного значения выходного напряжения и эталонного напряжения и формировании сигналом рассогласования по напряжению импульсов управления УЭК по принципу ШИМ. Этот способ позволяет обеспечить ИСН ПВ высокую статическую точность стабилизации выходного напряжения, но не обеспечивает малой длительности переходных процессов.
В качестве прототипа выбран способ управления ИСН ПН [3], согласно которому измеряют ток IС(t) конденсатора DLC-фильтра и напряжение UВЫХ, на выходе стабилизатора, получают сигнал рассогласования по напряжению ε (t), вычитая эталонное напряжение UЭТ из UВЫХ(t), получают первый сигнал, умножая сигнал рассогласования по напряжению ε (t) на коэффициент KP<l/(RC·C+T), где RC и С, соответственно, внутреннее активное сопротивление и емкость конденсатора DLC-фильтра, получают сигнал "ток конденсатора", считая его равным току IC(t) конденсатора DLC-фильтра, умножают сигнал "ток конденсатора" на коэффициент 1/С и, суммируя с первым сигналом, получают второй сигнал, интегрируют второй сигнал, причем диапазон возможного изменения интеграла второго сигнала ограничивают по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают третий сигнал, считая его равным интегралу второго сигнала, получают сигнал управления, умножая сигнал "ток конденсатора" и третий сигнал на коэффициенты KI1 и KU1, соответственно, и суммируя инверсные значения сигналов, полученных в результате умножения, формируют сигналом управления импульсы управления УЭК по принципу ШИМ с блокировкой модулятора в момент формирования модулируемого фронта импульса. При этом KI1 и KU1 соответствуют KI1 и KU1 из [1].
Этот способ позволяет обеспечить ИСН ПН малую длительность переходных процессов в динамических режимах работы и малую величину статической ошибки выходного напряжения.
Однако при его использовании для управления ИСН ПВ не достигается малая длительность переходных процессов в динамических режимах работы из-за различия силовых цепей ИСН ПН и ИСН ПВ.
В известных ИСН ПВ, как правило, решают задачи уменьшения величины статической ошибки выходного напряжения или длительности переходных процессов. Однако существуют области техники, в которых от ИСН ПВ требуется как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения. Например, такие требования к ИСН ПВ предъявляются при их использовании в системах электропитания космических аппаратов. Обеспечить в ИСН малую длительность переходных процессов и малую статическую ошибку выходного напряжения достаточно сложно, так как увеличение коэффициента усиления сигнала рассогласования по напряжению или интегрирования этого сигнала позволяет уменьшить статическую ошибку выходного напряжения, но, как правило, приводит к увеличению длительности переходных процессов в динамических режимах работы ИСН. В известном решении [3] обеспечивается как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения. Однако это решение применимо к ИСН ПН и при его использовании в ИСН ПВ не обеспечивает малой длительности переходных процессов из-за различия силовых цепей ИСН.
В основу изобретения положена задача повышения качества выходного напряжения ИСН ПВ в динамических и статических режимах его работы. При этом под повышением качества выходного напряжения в динамических режимах понимается уменьшение длительности переходных процессов, а в статических режимах - достижение астатизма выходного напряжения.
Поставленная задача решается тем, что в способе управления импульсным стабилизатором, содержащим дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, измеряют напряжение UВЫХ на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент КP, интегрируют второй сигнал, путем прерывания интегрирования ограничивают диапазон изменения интеграла второго сигнала по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают суммарный сигнал, умножая сигнал "ток конденсатора" и третий сигнал на коэффициенты KI и КU, соответственно, и суммируя инверсные значения сигналов, полученных в результате умножения, управляющим сигналом формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, согласно изобретению дополнительно измеряют входное напряжение UВХ, токи дросселя IL и нагрузки IH, вычисляют сигнал "ток конденсатора" IC=IL-IH·UВЫХ/UВХ, получают третий сигнал, интегрируя четвертый сигнал, вычисляемый путем вычитания из сигнала "ток конденсатора" самого третьего сигнала, взятого с коэффициентом КО<<1/Т, где Т - период преобразования, второй сигнал принимают равным первому, результирующий сигнал получают, вычитая интеграл второго сигнала из суммарного сигнала, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом
KI=2,4· L· UЛ(Т)/(Uвых·Т), KU=KI/T,
КP<4· KI·С· Uвых/[UВХ·Т(2· RС·C+T)],
где RС - внутреннее активное сопротивление конденсатора,
формируют нелинейное опорное напряжение модулятора
UЛ(t)=2,4· UЛ(T)· (t2/4· T2+t3/6· T3),
где 0<t<Т, UЛ(Т) - амплитудное значение нелинейного опорного напряжения модулятора.
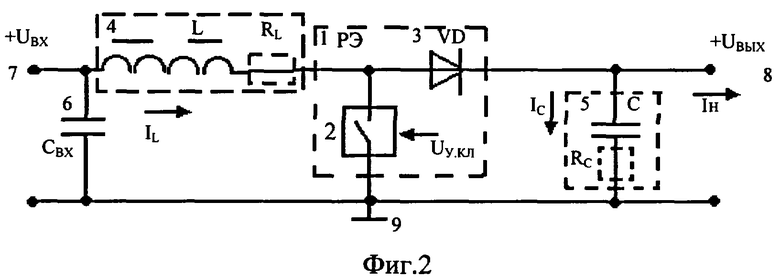
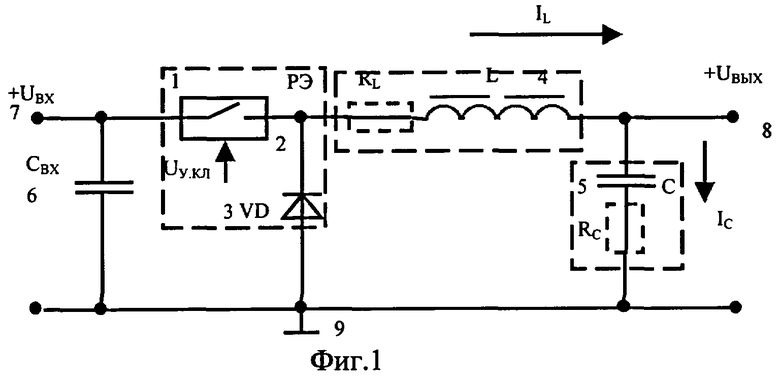
На фиг.1 и 2 приведены силовые цепи ИСН ПН и ИСН ПВ соответственно. На фиг.3 приведены временные диаграммы напряжений и токов элементов силовой цепи ИСН ПВ. На фиг.4 приведена амплитудно-импульсная модель ИСН ПВ. На фиг.5 - 7 приведены структурные схемы устройств управления, необходимые для доказательства возможности осуществления изобретения. На фиг.8 приведена функциональная схема ИСН ПВ, в котором реализован заявляемый способ. На фиг.9 и 10 приведены временные диаграммы выходного напряжения, тока дросселя и тока нагрузки ИСН ПВ, подтверждающие решение поставленной задачи.
Силовые цепи ИСН ПН (фиг.1) и ИСН ПВ (фиг.2) содержат регулирующий элемент 1, состоящий из УЭК 2 и диода 3, дроссель 4, конденсатор 5, входной конденсатор 6, вход 7, выход 8, общий провод 9.
Для доказательства решения поставленной выше задачи посредством предлагаемого способа управления, в частности обеспечения высокого качества выходного напряжения ИСН ПВ в динамических режимах работы, воспользуемся подходом [4], основанным на представлении ИСН с ШИМ в режиме ″ малого сигнала" адекватной амплитудно-импульсной моделью и применении для синтеза закона управления третьего полиномиального уравнения [5], позволяющего достичь грубости и осуществимости системы с минимальной конечной длительностью переходного процесса в условиях вариации параметров силовой цепи. Для чего из общего процесса в ИСН с ШИМ вычленяют стационарный процесс, соответствующий неизменной (стационарной) длительности tИ.СТ импульсов управления регулирующим элементом (РЭ) и процесс регулирования, обусловленный приращением длительности tИ импульса управления на величину tИ.Р относительно стационарной длительности tИ.СТ. Применительно к процессу регулирования для режима ″ малого сигнала″ , когда

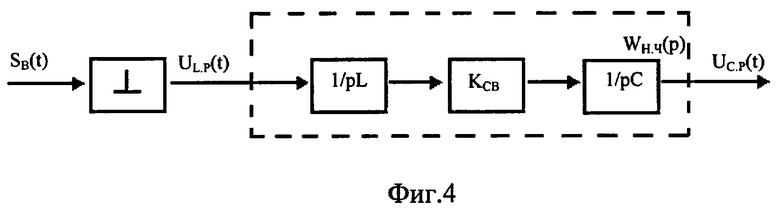
где Т - период преобразования, ИСН с ШИМ заменятся моделью с амплитудно-импульсной модуляцией (АИМ), в которой импульсы напряжения UL.P(t), воздействующих со стороны регулирующего элемента на дроссель и имеющие длительность tИ.Р (t), заменятся эквивалентными по вольт-секундной ″ площади″ δ -функциями.
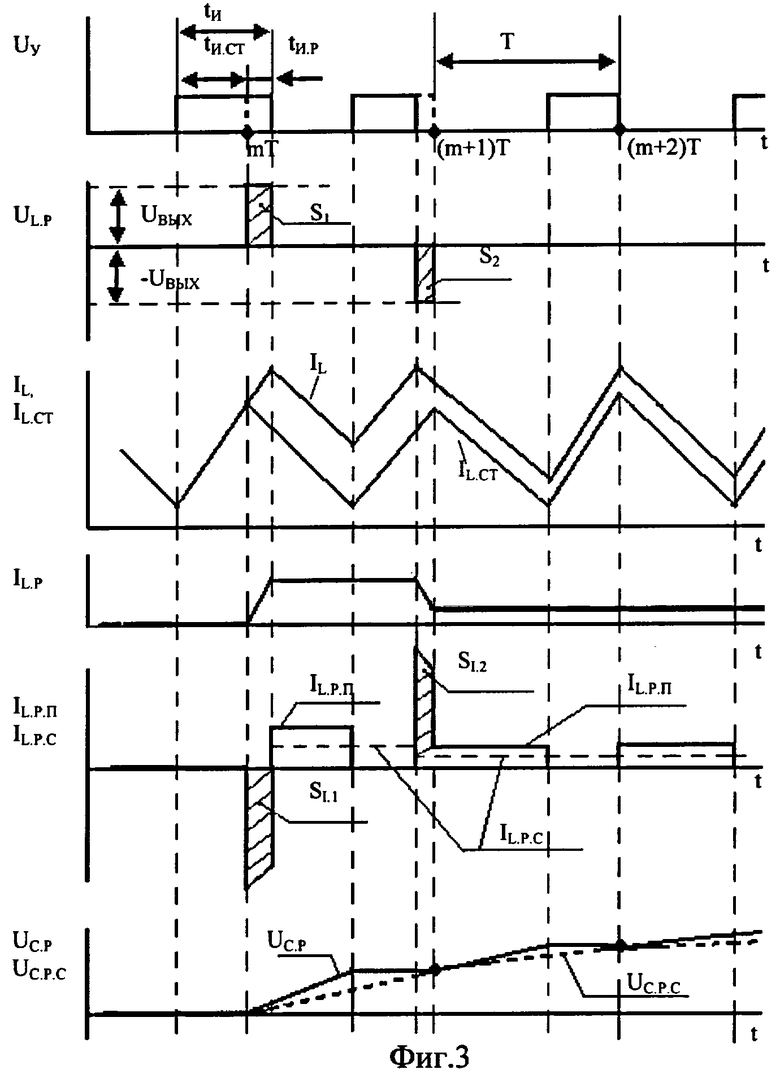
Процесс изменения переменных ИСН ПВ, напряжения UL(t) и тока IL(t) дросселя L и напряжения UC(t) на емкости конденсатора С с разделением на регулируемую (помечена индексом ″ Р″ ) и стационарную (помечена индексом ″ СТ″ ) составляющие, показан на временных диаграммах (фиг.3). В качестве нагрузки ИСН ПВ принят источник тока.
Регулируемая составляющая напряжения UL.P(t) на дросселе L имеет вид двухполярных импульсов с амплитудой UL.P.A(t) и длительностью tИ.Р(t) (фиг.3). Амплитуда UL.P.A(t) определяется как разность напряжений UL.НАК(t) и UL.PAC(t) на дросселе L на интервалах накопления и расходования энергии дросселя, соответственно, [4]. На интервале накопления энергии УЭК 2 (фиг.2) включен и UL.НАК(t)=UВХ(t), а на интервале расходования энергии УЭК 2 выключен и UL.PAC(t)=UBx(t)-UBЫХ, где UВХ(t) и UВЫХ - напряжения на входе и выходе ИСН ПВ, соответственно. Следовательно

В отличие от ИСН ПН в ИСН ПВ регулируемая составляющая тока дросселя IL.P(t) передается в конденсатор С (конденсатор 5 фиг.2) только на интервалах проводящего состояния диода VD. Эта передаваемая часть IL.P.П(t) регулируемой составляющей тока IL.P(t) дросселя приведена на соответствующей временной диаграмме (фиг.3). Выделенные на ней штриховкой ампер-секундные ″ площади″ тока SI.1 и SI.2 не связаны с регулируемой составляющей тока IL.P(t) дросселя, а объясняются изменением длительности передачи стационарной составляющей тока дросселя в конденсатор С.
Закон управления, найденный в [4], обеспечивает ИСН ПН с однозвенным LC-фильтром минимальную конечную длительность переходных процессов в два периода преобразования. На этих двух периодах, следующих за моментом действия возмущения, регулируемые составляющие импульсов управления различны по знаку, то есть, если на первом периоде tИ.Р>0, то на втором - tИ.Р<0. Предполагая аналогичное изменение регулируемой составляющей длительности tИ.Р импульсов управления в ИСН ПВ с синтезируемым законом управления, можно считать, что ампер-секундные ″ площади″ SI.1 и SI.2, примерно равные по модулю и противоположные по знаку, взаимно компенсируются. Поэтому для рассматриваемого случая малых приращений tИ.Р можно пренебречь влиянием ампер-секундных ″ площадей″ SI.1 и SI.2 на изменение регулируемой составляющей напряжения UC.P на емкости конденсатора С.
Среднее за период Т значение передаваемой регулируемой составляющей тока IL.p.п дросселя:

где КCB=(1-КЗ.СТ) - коэффициент связи (относительное время проводящего состояния диода 3), а КЗ.СТ=tИ.СТ/Т - стационарный коэффициент заполнения импульсов управления. На соответствующей временной диаграмме (фиг.3) IL.P.C(t) показано пунктиром. На временных диаграммах UC.P(t), UC.P.C(t) показаны регулируемые составляющие напряжения на емкости конденсатора С, обусловленные регулируемыми составляющими тока дросселя IL.P.П и IL.P.C, соответственно. Поскольку в моменты времени mТ регулируемые составляющие напряжений UC.P(mT) и UC.P.C(mT) равны, то в амплитудно-импульсной модели ИСН ПВ реальную импульсную связь дросселя L с конденсатором С можно заменить на непрерывную через звено с коэффициентом передачи КCB.
В быстродействующем ИСН понижающего типа при выполнении условий

где  , TL=L/RL, L и RL - индуктивность и активное внутреннее сопротивление дросселя, а С - емкость конденсатора фильтра, можно пренебречь влиянием проводимости активной и активно-индуктивной нагрузок на передаточную функцию непрерывной части, а саму непрерывную часть представить в виде последовательно включенных дросселя и конденсатора с передаточными функциями WL(p)=1/(pL) и Wc(p)=1/(рС), соответственно, [4].
, TL=L/RL, L и RL - индуктивность и активное внутреннее сопротивление дросселя, а С - емкость конденсатора фильтра, можно пренебречь влиянием проводимости активной и активно-индуктивной нагрузок на передаточную функцию непрерывной части, а саму непрерывную часть представить в виде последовательно включенных дросселя и конденсатора с передаточными функциями WL(p)=1/(pL) и Wc(p)=1/(рС), соответственно, [4].
В предположении, что в ИСН ПВ выполняются условия (4), а синтезируемый закон управления обеспечит ему те же свойства, что и закон управления [4] ИСН понижающего типа, амплитудно-импульсная модель силовой цепи ИСН ПВ примет вид, приведенный на фиг.4.
Эта амплитудно-импульсная модель по сути является общей для ИСН ПВ и ИСН ПН. Различными являются только величины коэффициента связи КСВ и входного сигнала модулятора SB(t). В ИСН ПН дроссель и конденсатор связаны непрерывно и КCB=1, в то время как в ИСН ПВ согласно (3) КCB=(1-КЗ.СТ). В ИСН ПН амплитудное значение регулируемой составляющей напряжения на дросселе UL.P.A=UВХ и входной сигнал модулятора

в то время как для ИСН ПВ UL.P.A=UВЫХ и входной сигнал модулятора

Полученный для обобщенной модели (фиг.4) с использованием методики синтеза [4] закон изменения дискрет входного сигнала амплитудно-импульсного модулятора
где Δ UC.P(mT)=UC.P(mT)-UC.P((m-1)(T), KM.O=tИ.Р/UУ.Р - коэффициент передачи модулятора по регулируемым составляющим, аналогичен соответствующему закону для ИСН ПН [4] и отличается только количественными значениями КСВ и UL.P.A.
Реализация (7) в ИСН с ШИМ определяется способом формирования входного сигнала широтно-импульсного модулятора UУ(t) и заключается вычислении UУ.P(mT) к реальному моменту переключения tП, отличающемуся от стационарного mТ на величину приращения длительности импульса tИ.P. Из трех известных [4] для ИСН ПН законов формирования входного сигнала ШИМ практическое применение получил закон по непрерывным значениям переменных состояния

где ε С(t)=UС(t)-UЭТ - сигнал рассогласования по напряжению на емкости конденсатора С, UЭТ - эталонное напряжение, UC(t) и IC(t) - текущие значения напряжения на емкости конденсатора фильтра и его тока, соответственно.
Закон формирования входного сигнала ШИМ для обобщенной модели ИСН, полученный из (7) с использованием методики [4]:
аналогичен (8). При его использовании в ИСН ПВ необходимо с учетом (2) и (3) принять UL.P.A=UВЫХ, а КСВ=(1-КЗ.СТ).
Сложность технической реализации (9) состоит в том, что напряжение UC(t) на емкости конденсатора выходного фильтра, отличающееся от выходного напряжения UВЫХ(t) на величину падения напряжения URC на внутреннем активном сопротивлении RC конденсатора, не поддается непосредственному измерению. Один из вариантов [1] его вычисления для ИСН ПН заключается в интегрировании тока IC.1(t) конденсатора, взятого с коэффициентом 1/С, где С - емкость конденсатора выходного фильтра. При технической реализации (9) в ИСН ПВ ток IC.1(t) должен соответствовать току конденсатора фильтра модели с непрерывной связью дросселя и конденсатора (фиг.4). Этот ток может быть вычислен

Поскольку в ИСН ПВ (1-tИ.СТ/Т)=UВХ/UВЫХ, то и коэффициент связи КCB=(1-tИ.СТ/T)=UВХ/UВЫХ. В случае изменения входного напряжения UВХ во времени КСВ(t)=UВХ(t)/UВЫХ.
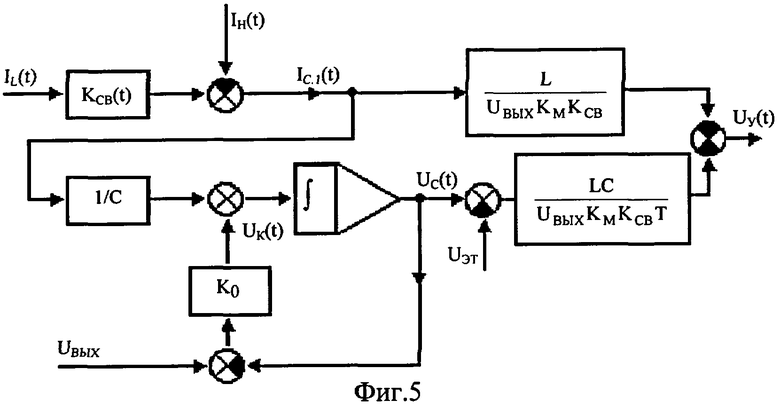
Структурная схема устройства управления, реализующего (9) с учетом (10), приведена на фиг.5.
Сигнал коррекции UK(t)=К0·(UВЫХ(t)-UC(t)) обеспечивает соответствие среднего значения напряжения Uc(t) на выходе интегратора среднему значению выходного напряжения UВЫХ(t), предотвращая возможный дрейф UC(t) из-за не идеальности элементов, на которых реализована схема управления. Величина коэффициента К0 выбирается из условия K0<(0,05-0,0005)/(C· RС+T) [1].
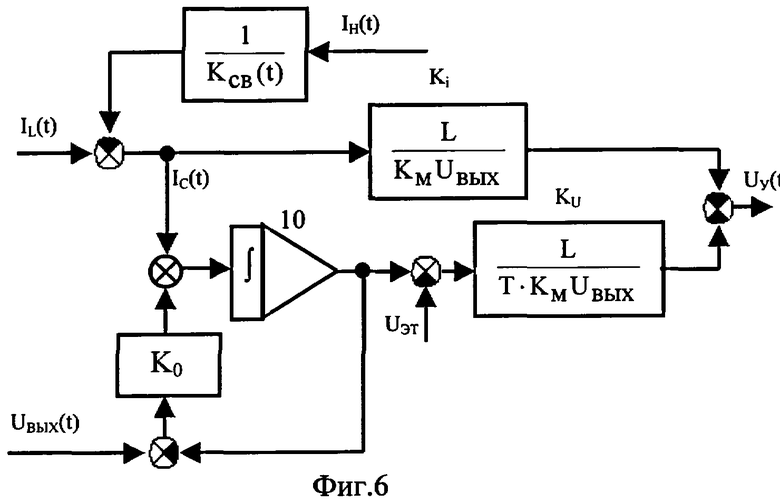
После проведения структурных преобразований с учетом KCB(t)=UBX(t)/UВЫХ и замене тока IC.1(t) на ток

структурная схема устройства управления (фиг.5) принимает вид, приведенный на фиг.6. Этой структурной схеме (фиг.6) соответствует закон формирования сигнала управления

Коэффициент передачи Км ШИМ зависит не только от скорости U’Л изменения опорного сигнала ШИМ, но и от скорости U’У(t) изменения входного сигнала ШИМ и согласно [4] определяется

Сохранение необходимых, согласно (12), коэффициентов KI и КU усиления сигналов ε C(t) и IC(t) возможно за счет изменения скорости опорного сигнала ШИМ – U’Л(t), где 0<t≤ Т.
В случае модуляции заднего фронта импульса управления УЭК скорости изменения I’C(t) и ε ’C(t) в момент переключения tИ.СТ определяются

Определим скорость U’У(tИ.СТ) в момент переключения, подставив (14) в (12), предварительно продифференцировав последнее

После преобразования (15), с учетом того, что UВХ/UВЫХ=1-КЗ.СТ=1-tИ.CТ/Т получаем
Подставив (16) в (13) и проведя преобразования, получим скорость изменения нелинейного опорного сигнала ШИМ в момент переключения tИ.СТ:

Нелинейный опорный сигнал ШИМ

где КМ=const - желаемый коэффициент передачи ШИМ, 0<t≤ Т.
Выразим желаемый коэффициент передачи ШИМ через амплитудное значение UЛ(Т) нелинейного опорного сигнала ШИМ, приняв в (18) t=T
UЛ(Т)=(Т/4+Т/6)/KM.
После преобразования

Подставив (19) в (18) и в (12) получим, соответственно, закон изменения нелинейного опорного сигнала ШИМ

и закон формирования входного сигнала ШИМ

где KI=2,4· L· UЛ(T)/(UВЫХ·T); KU=KI/T.
В случае модуляции переднего фронта импульса управления УЭК законы формирования входного сигнала ШИМ - UУ(t) и нелинейного опорного сигнала ШИМ - UЛ(t), полученные аналогично соответствующим законам для случая модуляции заднего фронта импульса управления УЭК, также определяются выражениями (21) и (20). Входной сигнал ШИМ дополнительно инвертируют, за счет чего обеспечивают отрицательную обратную связь.
Задача по обеспечению высокого качества выходного напряжения в динамических и статистических режимах работы в ИСН ПН решена в [3], где уменьшение статической ошибки стабилизации выходного напряжения ИСН ПН достигается при использовании схемы управления, близкой к приведенной на фиг.6, за счет интегрирования интегратором 10 суммарного сигнала из суммы сигнала, равного току IC(t) конденсатора, и сигнала рассогласования по напряжению ε (t)=UВЫХ(t)-UЭТ. При этом исключается какая-либо коррекция выходного напряжения интегратора 10. Недостаток такого решения заключается в появлении статической ошибки стабилизации выходного напряжения UВЫХ из-за погрешности датчика или устройства вычисления сигнала ″ ток конденсатора″ IC(t).
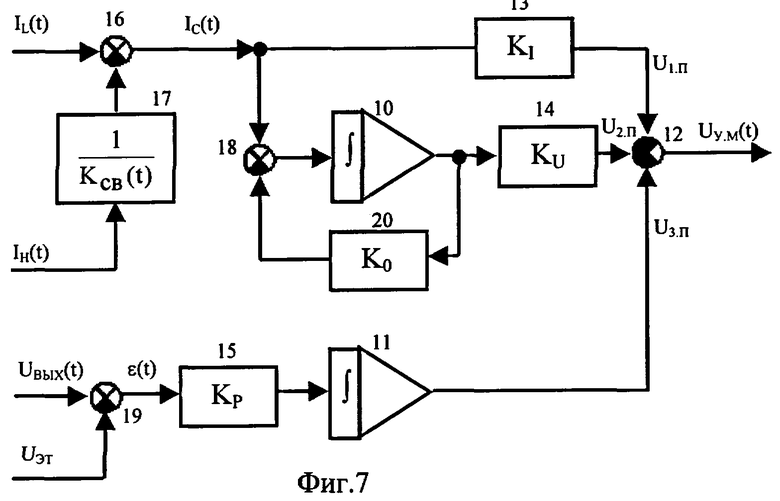
В предлагаемом техническом решении статическая ошибка стабилизации UВЫХ исключается за счет интегрирования сигнала ″ ток конденсатора″ IC(t) и сигнала рассогласования по напряжению ε (t) по отдельности разными интеграторами. На фиг.7 приведена структурная схема устройства управления ИСН ПВ, полученная из структурной схемы (фиг.6) разделением интегратора (10) на два отдельных интегратора. В ней, кроме интегратора 10, интегрирующего сигнал IC(t), использован второй интегратор 11, интегрирующий сигнал рассогласования ε (t), взятый с коэффициентом КР. Интеграл сигнала рассогласования ε (t), взятый с коэффициентом КР, суммируется посредством сумматора 12 с UУ(t), определяемым (21). Выходной сигнал сумматора (12) является результирующим сигналом UУ.M(t), поступающим на вход ШИМ.
Величина коэффициента усиления сигнала рассогласования по напряжению Кр определяется из условия малого влияния интеграла сигнала рассогласования на результирующий сигнал UУ.M(t), поступающий на вход ШИМ. Условие малого влияния сигнала рассогласования может быть записано в виде

где U1.П(t), U2.П(t), U3.П(t) - сигналы на входах сумматора 12 (фиг.7). Рассмотрим случай ступенчатого изменения тока нагрузки IH(t) на величину Δ IH. При этом из (10) с учетом (11) следует

Максимальное отклонение сигнала UЗ.П(t) будет через (2-4)Т после момента ступенчатого изменения тока в момент возврата напряжения UВЫХ к стабильному значению. Однако влияние интеграла сигнала рассогласования на входной сигнал ШИМ в динамических режимах определяется не только амплитудой сигнала U3.П, но и скоростью его изменения U’З.П, которая максимальна при максимальном сигнале рассогласования ε (t). Максимальная величина сигнала рассогласования ε (t) в ИСН ПН отстоит от момента приращения тока нагрузки на время, равное периоду Т [4]. Полагая, что в ИСН ПВ при заявляемом управлении максимальное отклонение сигнала рассогласования ε (t) будет также через период Т, запишем (22) в виде

С учетом (21) и (23)

Отклонение U3.П через период Т

Подставив (25) и (26) в (24) и преобразовав, получаем

где RС и С - внутреннее активное сопротивление и емкость конденсатора 5 (фиг.2).
Блоки 13-15 имеют коэффициенты передачи KI, KU, KP, определяемые выражениями (12) и (27). Сумматор 16 совместно с перемножителем 17 обеспечивают вычисление тока Ic(t) в соответствии с (10) и (11). Сумматоры 18 и 19 обеспечивают формирование входного сигнала интегратора 10 и сигнала рассогласования по напряжению ε (t).
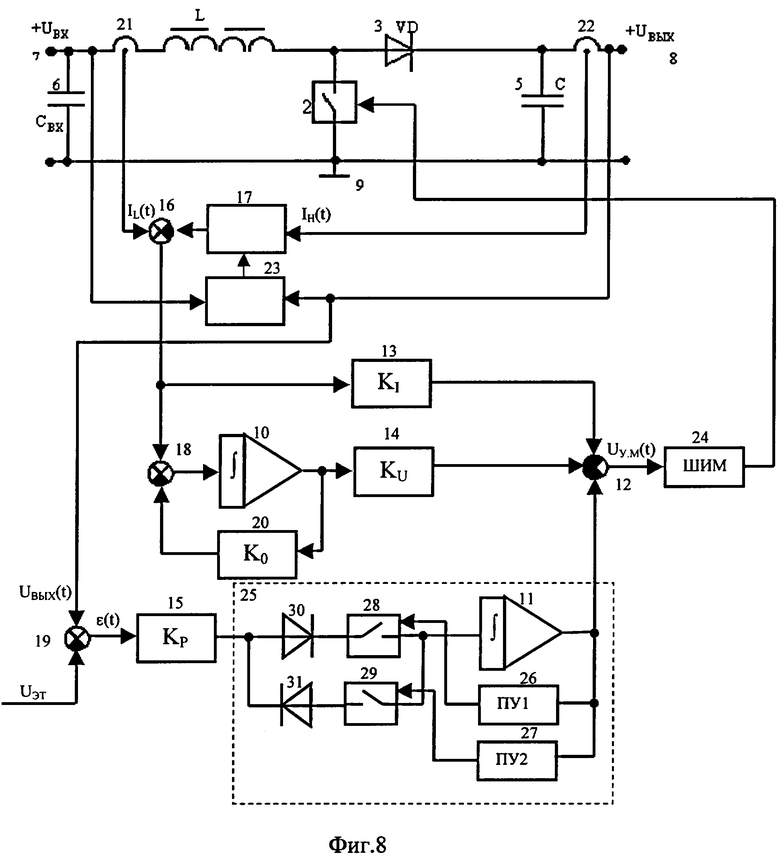
Поскольку статическая ошибка при стабилизации выходного напряжения, при использовании схемы (фиг.7), устраняется посредством контура обратной связи, включающего интегратор 11, то нет необходимости вычислять посредством интегратора 10 постоянную составляющую напряжения UC(t) на емкости конденсатора 5 и путем сравнения UC(t) с UЭТ получать сигнал ε C(t). Для обеспечения малой длительности переходных процессов достаточно в (21) использовать только переменную составляющую напряжения ε C(t). Переменная составляющая ε C.П(t) напряжения на емкости конденсатора 5 для модели ИСН (фиг.4) вычисляется путем интегрирования тока IC(t) интегратором 10. Охват интегратора 10 отрицательной обратной связью посредством блока 20 и сумматора 18 необходим для исключения постоянного увеличения (или уменьшения) выходного сигнала интегратора 10 в установившемся режиме из-за неидеальности самого интегратора или наличия постоянной составляющей во входном сигнале интегратора, например из-за неидеальности датчиков тока. Величина коэффициента К0 передачи блока 20 выбирается достаточно малой, чтобы исключить влияние цепи отрицательной обратной связи на процесс интегрирования тока IС(t). При выборе К0<<1/Т, где Т - период преобразования, блок 20 не оказывает существенного влияния на процесс интегрирования тока IC(t) интегратором 10 на интервале переходного процесса в (2-4) Т. На фиг.8 приведен ИСН ПВ со схемой управления, в которой реализован предлагаемый способ управления. Кроме рассмотренных ранее элементов, силовая цепь ИСН ПВ (фиг.8) содержит датчики 21 и 22 токов дросселя и нагрузки. Схема управления относительно схемы (фиг.7) дополнена делителем 23, который совместно с перемножителем 17 обеспечивают вычисление IC(t) в соответствии с выражениями (10) и (11). Широтно-импульсный модулятор 24 формирует сигнал управления УЭК 3 (фиг.2) по принципу ШИМ с блокировкой модулятора в момент образования регулируемого фронта импульса.
При коммутации значительной активной или активно-емкостной нагрузок, приводящих к прерыванию ШИМ, сигнал рассогласования Δ UВЫХ(t) имеет большие значения по амплитуде и длительности. При этом к моменту возврата напряжения на выходе ИСН к стабильному значению интеграл сигнала рассогласования по напряжению принимает максимальное значение. Причем возврат интеграла сигнала рассогласования к его значениям до момента коммутации нагрузки и переход ИСН к статическому режиму работы возможен только за счет смены знака Δ UВЫХ, т.е. перерегулирования, приводящего к увеличению длительности переходного процесса. Исключить или существенно уменьшить перерегулирование можно за счет прерывания процесса интегрирования в случае выхода интеграла сигнала рассогласования за границы зоны его изменений в режимах работы ИСН, не приводящих к прерыванию модуляции. Для улучшения качества выходного напряжения в динамических режимах работы, связанных со значительными возмущающими воздействиями, приводящими к прерыванию процесса широтно-импульсной модуляции, в схеме (фиг.8) использован интегратор 25 с ограниченным диапазоном изменения значений интеграла сигнала рассогласования ε (t). Прерывание процесса интегрирования сигнала интегратором 11 достигается за счет применения пороговых устройств 26, 27, управляемых ключей 28, 29 и диодов 30, 31. Возможна другая реализация интегратора 25 с ограниченным диапазоном изменения значений интеграла сигнала рассогласования ε (t), например, путем шунтирования двуханодным стабилитроном конденсатора интегратора, выполненного на операционном усилителе.
Для подтверждения реализуемости предлагаемого способа на основе схемы ИСН ПВ (фиг.8) была разработана математическая модель ИСН ПВ в формате Pspise и изготовлен его макет. Макет ИСН ПВ и его математическая модель имеют следующие параметры: UВЫХ=100 В, UВХ=40-95 В, L=200 мкГн, С=1000 мкФ, RС=0,01 Ом, Т=25 кГц.
Проведенные исследования переходных и установившихся процессов в макете ИСН ПВ и его математической модели показали работоспособность ИСН ПВ с заявленным управлением и решение поставленных задач.
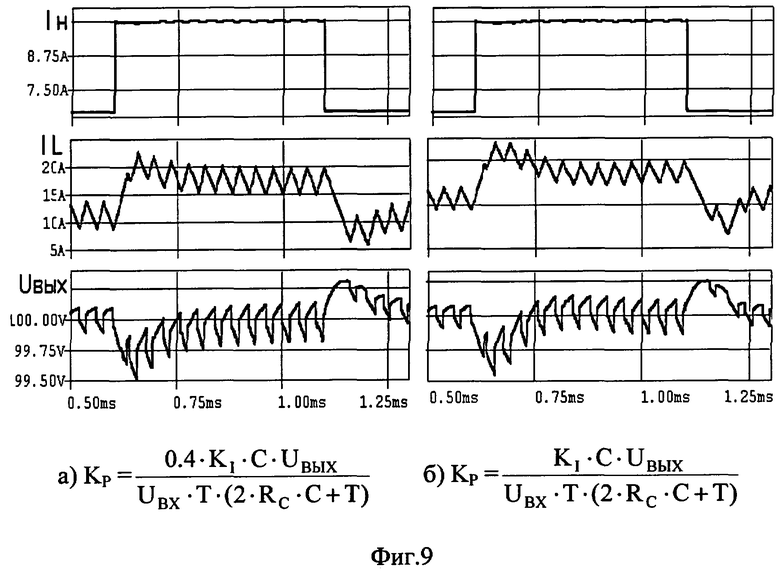
На фиг.9 а, б приведены временные диаграммы токов нагрузки IH и дросселя IL и напряжения UВЫХ на выходе ИСН полученные при использовании математической модели ИСН ПВ. Временные диаграммы получены для двух значений коэффициента КP
KP=0.4· KI·C· UВЫХ/[UВХ·T(2· RC·C+T)], и
KP=KI·C· UВЫХ/[UВХ·T(2· RC·C+T)].
Из анализа временных диаграмм видно, что при КP=0.4· KI·C· UВЫХ/[UBX·T(2· RC·C+T)] (фиг.9а) длительность переходных процессов, вызванных коммутацией активной нагрузки, составляет (3-4)Т, а при КP=KI·C· UВЫХ/[UВХ·T(2· RC·C+T)] длительность переходных процессов возрастает и появляется перерегулирование выходного напряжения. Это подтверждает необходимость ограничения величины коэффициента K1 на указанном уровне. При вариации параметров ИСН, входящих в выражение (27) с одновременной КP согласно (27), длительность переходных процессов, выраженная в периодах Т, сохраняется.
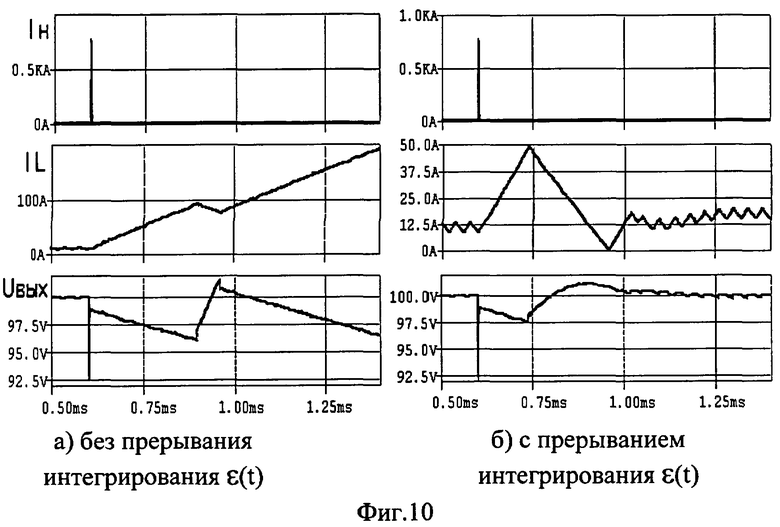
На фиг.10 а, б приведены временные диаграммы токов нагрузки IH и дросселя IL и напряжения UВЫХ на выходе ИСН, полученные при коммутации активно-емкостной нагрузки и при использовании в качестве интегратора 26 интегратора без прерывания процесса интегрирования (фиг.10 а) и при использовании в качестве интегратора 26 интегратора с прерыванием процесса интегрирования (фиг.10 б). Из сравнения переходных процессов в ИСН ПВ (фиг.10 а) и (фиг.10 б) видно, что прерывание процесса интегрирования сигнала рассогласования значительно сокращает время переходных процессов, связанных с прерыванием ШИМ.
ЛИТЕРАТУРА
1. А.С. №1403037 СССР, кл. G 05 F 1/56. Способ стабилизации выходного напряжения импульсного стабилизатора / В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 15.06.88, Бюл. №22.
2. А.С. №440659 СССР, кл. G 05 F 1/56. Стабилизатор постоянного напряжения / Ю.А.Мордвинов и П.П.Гурский. - Опубл. 15.10.92, Бюл. №38.
3. Патент №2025764 РФ, кл. G 05 F 1/56. Способ управления импульсным стабилизатором / В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 30.12.94, Бюл. №24.
4. Иванчура В.И., Манаков А.В., Соустин Б.П. Синтез исследование быстродействующего ИПН с ШИМ // Техническая электродинамика. - 1987. - c.43-51.
5. Цыпкин Я.З. Теория линейных импульсных систем. - М.: Физматгиз, 1963. - 968 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| Способ управления зарядным устройством с импульсным принципом действия | 2023 |
|
RU2813604C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 1988 |
|
RU2025764C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1348796A1 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
Изобретение относится к преобразовательной технике и может быть использовано для управления импульсными стабилизаторами постоянного напряжения (ИСН) повышающего типа (ПВ) с широтно-импульсной модуляцией, имеющими малые длительность переходных процессов и статическую ошибку стабилизации выходного напряжения. Технический результат заключается в повышении качества выходного напряжения ИСН ПВ в режимах: динамических – уменьшение длительности переходных процессов - и статических – достижение астатизма выходного напряжения. Для чего вычисляют сигнал Ic=IL-IH·UВЫХ/UВХ, где IL и IH - токи дросселя и нагрузки ИСН, UВХ и Uвых - напряжения на входе и выходе ИСН, и сигнал рассогласования ε =Uвых-UЭТ, где Uэт - эталонное напряжение. Сигнал рассогласования ε усиливают в КР раз и интегрируют, ограничивая диапазон возможного изменения интеграла (прерывая интегрирование) по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции. Сигнал Ic подвергают усилению и частотной коррекции, и в сумме с интегралом сигнала рассогласования подают на вход модулятора (М). Пилообразное опорное напряжение М формируют в виде суммы отрезков квадратичной и кубической парабол. 10 ил.
Способ управления импульсным стабилизатором, содержащим дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, заключающийся в том, что измеряют напряжение Uвых на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент КP, интегрируют второй сигнал, путем прерывания интегрирования ограничивают диапазон изменения интеграла второго сигнала по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают суммарный сигнал, умножая сигнал "ток конденсатора" и третий сигнал на коэффициенты KI и КU соответственно, и, суммируя инверсные значения сигналов, полученных в результате умножения, сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, отличающийся тем, что дополнительно измеряют входное напряжение UВХ, токи дросселя IL и нагрузки IH, вычисляют сигнал "ток конденсатора" IC=IL-IH·UВЫХ/UВХ, получают третий сигнал, интегрируя четвертый сигнал, вычисляемый путем вычитания из сигнала "ток конденсатора" самого третьего сигнала, взятого с коэффициентом К0<<1/Т, где Т - период преобразования, второй сигнал принимают равным первому, результирующий сигнал получают, вычитая интеграл второго сигнала из суммарного сигнала, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом
KI=2,4· L· UЛ(T)/(UВЫХ·Т), КU=КI/Т,
КP<4· KI·C· UВЫХ/[UВХ·Т(2· RС·C+T)],
где RС - внутреннее активное сопротивление конденсатора,
а нелинейное опорное напряжение модулятора
UЛ(t)=2,4· UЛ(T)· (t2/4· T2+t3/6· T3),
где 0<t<Т,
UЛ(T) - амплитудное значение нелинейного опорного напряжения модулятора.
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 1988 |
|
RU2025764C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1986 |
|
SU1403037A1 |
| Способ управления импульсным стабилизатором | 1985 |
|
SU1495770A1 |
| Способ формирования постоянного напряжения | 1991 |
|
SU1777218A1 |
| US 4683529, 28.07.1987. | |||

