ройства, причем выход последнего через ключ аналоговых сигналов соединен с управляющим входом управителя частоты, а выход порогового устройства через одновибратор - с управляющим входом упомянутого ключа; выход основного корректирукщего устройства соединен с усилителем мощности через сумматор, другой вход которого через второе дополнительное корректирующее устройство соединен автогенератором.
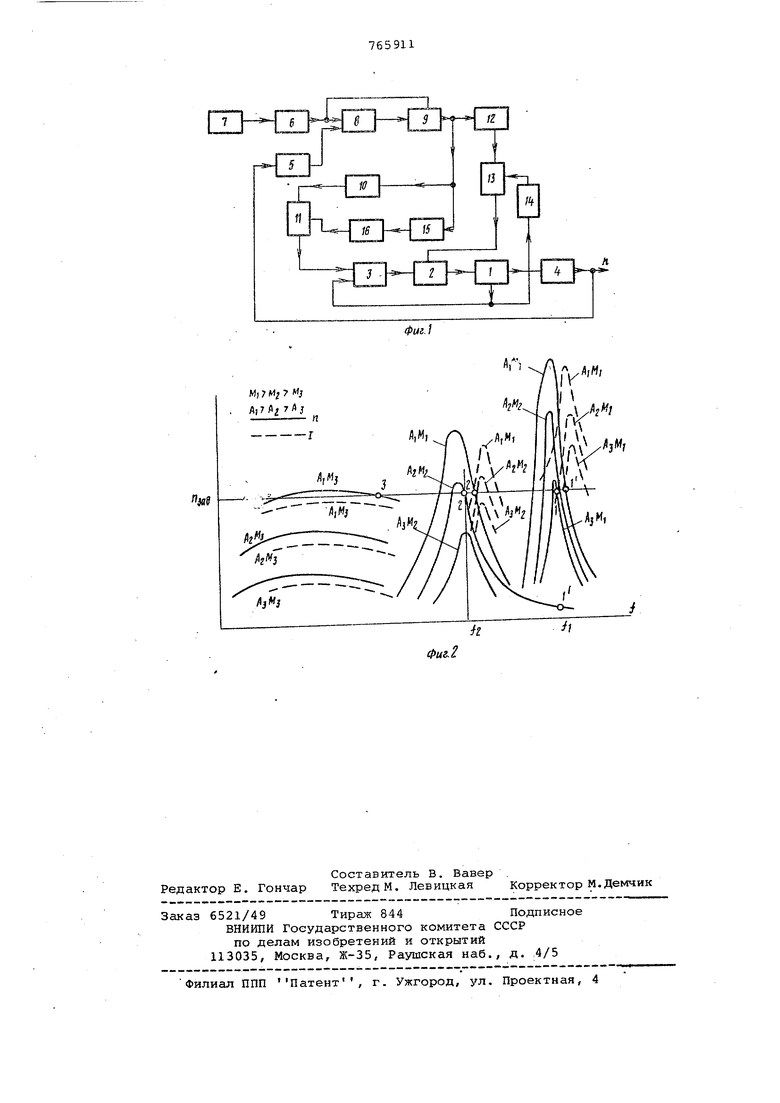
На фиг. 1 представлена схема устройства управления (стабилизации) скоростью пъезодвигателя; на фиг. 2 - характеристика пъезодвигателя, иллюстрирующая работу устройства и представляющие зависимость тока питания и скорости пъезодвигателя от частоты,, снятые для ряда фиксированных значений нагрузочных моментов М и амплитуд питающего напряжения А.
Устройс ;во содержит пъезодвигатель 1, пъезорезонатор (ПР) которог питается от усилителя мощности 2. Последовательно с ПР включен управитель частоты 3 (в простейшем случае последовательный резонансный контур, перестраиваемый напряжением или током). ПР двигателя 1, управитель частоты 3 и усилитель мощности 2 образуют петлю положительно обратной связи автогенератора синусоидальных колебаний, частотно-задающим элементом которого является система управитель частоты - ПР двигателя. Сигнал, подаваемый на управляющий (верхний, см. фиг. 1) вход управителя частоты, позволяет перестраивать его резонансную частоту на 1-5%. При малых нагрузочных моментах, когда как,видно из фиг. 2, добротность ПР велика, добротность системы управитель частоты - ПР определяется свойствами последнего. При изменениях сигнала на управляющем входе управителя частоты резонансная частота тока этой системы а значит и частота автогенератора перестраивается в пределах 1-5% относительно резонансной частоты тока ПР. Этого достаточно, чтобы установить рабочую частоту двкгателя вблизи резонансной частоты соответствукщей характеристики скорость-частота в рабочем диапазоне нагрузочных моментов и амплитуд напряжения питания. Если нагрузочные моменты значительные ( М М, см. фиг. 2),.добротность ПР падает, а резонансная частота тока и добротность системы управитель частоты ПР задается свойствами управителя частоты. Параметры последнего подобраны таким образом, что нормальная работа автогенератора продолжается и в ЭТ1РС условиях. С валом пъезодвигателя 1 связан датчик обра
ной связи 4, частота выходного напряжения которого пропорциональна скорости вращения пъезодвигателя. Сигнал с выхода датчика обратной связи преобразуется в последова, тельность прямоугольных импульсов напряжения с помощью формирователя 5. Аналогичную функцию выполняет формирователь 6 для генератора эталонной частоты 7 задания скороQ сти. Сигналы формирователей 5 и 6
поступают на блок 8 вычитания частот, вырабатывающий последовательность импульсов, скважность которых пропорциональна разности фазовых углов входных сигналов блока.Сигналы бло5 ка 8 и формирователя 6 воздействуют на входы фазового детектора 9, выполняемого на базе интегратора с запоминающей емкостью. Выходное напряжение фазового детектора, про0 порциональное интегралу отклонения скорости двигателя от задания, через динамический формирователь 10, реализующий пропорционально-дифференцирующее звено, и ключ аналоговых
5 сигналов 11 воздействует на управитель частоты 3, т.е. на частоту возбуждакндего напряжения, а через корректирующее устройство 12 и сумматор 13 на усилитель мощности 2,
изменяя амплитуду напряжения питания пъезодвигателя. Передаточная функция корректирующего устройства 12 выбрана в соответствии с требуемым законом управления (в данном случае ПИ). На второй вход сумматора 13 поступает сигнал с корректирующего устройства 14, выполненного на основе преобразователя частота-напряжение и вырабатывающего сигнал, пропорциональный абсолютной величине производной частоты автогенератора по времени.
Пороговое устройство 15 представляет собой триггер Шмидта. Его вход
соединен с выходом фазового детектора, а сигнал на его выходе появляется в момент, когда производная от выходного напряжения фазового детектора 9, т.е. скорость вращения
пъезодвигателя, превысит по абсолютной величине заданный уровень. Сигнал порогового устройства 15 запускает одновибратор 1б.Формируемый на выходе одновибратора 16 импульс напряжения размыкает ключ 11, блокируя тем самым прохождение сигнала на управляющий вход управителя частоты. В результате рабочая частота сдвигается в направлении частоты начальной настройки управителя частоты
(т.е. частоты настройки управителя частоты при отсутствии сигнала на его верхнем входе). После окончания импульса на выходе одновибратора 16 ключ 11 снова замыкает контур управления частотой.
Рассмотрим как протекает процесс отслеживания заданной скорости вращения при изменениях нагрузочного момента. При малых нагрузочных моментах зависимость скорость-частота имеет резко вьфаженный резонансный характер. В этих условиях для нормального функционирования системы необходимо производить отслеживание рабочей точки в функции нагрузочного момента вблизи частоты, соответствующей максимальной скорости. При зтом, рабочая точка должна находиться на заранее .выбранном склоне резонансной характеристики скорость-частота и не должна переходить на другой склон, чтобы не нарушалась динамическая устойчивость системы в результате изменения знака обратной связи в контуре регулирования по частоте. Пусть в исходном состоянии нагрузочный момент равен М, а рабочая точка находится в положении Ч (см. фиг. 2).Так как скорость вращения близка к заданной {I1o,oie ) , сигналы на выходах порогового устройства 15 и одновибратора 1 б отсутствуют, ключ 11 замкнут и на управляющий (верхний) вход управителя частоты 3 проходит сигнал с динамического формирователя 10, поддерживая соответствующую рабочей точке частоту f возбуждающего напряжения. Одновременно сигнал с выхода корректирующего устройства 12 згодает требуемую амплитуду A-J, возбуждающего напряжения. Ввиду того, что рабочая частота не меняется, сигнал на выходе дифференцирующего звена 14 отсутствует.
При скачкообразном изменении нагрзочного момента до значения М М сигнал рассогласования с выхода фазового детектора,формируеьвлй корректирющими устройствами 10 и 12,стремится уменьшить частоту и увеличить амплитду возбуждающего напряжения. При измнениях частоты на выходе корректирующего устройства 14 возникает сигнал, сдерживающий рост амплитуды воздуждающего напряжения.Так как корректирующее устройство 10 представляет собой пропорцио наль но-дифферен цирующее звено, и частично под влиянием сигнала устройства 14 воздействие по частоте опережает воздействие по амплитуде. Таким образом наличие дополнительного корректирующего устройства 10, является принципиально необходимым. В противном случае могут возникнуть большие колебания мгновенной скорости, таккак из-за смещения резонансных частот при вариациях момента рабочая точка окажется глубоко внизу на склоне характеристики скорость-частота (например, в положении на фиг. 2). По окончании переходного процесса установятся новые значения,
амплитуды и частоты возбуждающего напряжения (Aj. и f 2 соответственно, фиг. 2) , а рабочая точка окажется в положении, близком к точке 2 вблизи резонанса соответствугощей характеристики скорость-частота
а не в положении, например, 2 t I по той причине, что воздействие на амплитуду, вызванное изменением частоты и вырабатываемое д№})ференц друющим звеном 10 опережает воздействие на
0 амплитуду, вызванное отклонением скорости и вырабатываемое корректирующим устройством 12. Таким образом введение дополнительного корректирующего устройства 14 обеспечивает по5ложение рабочей точки вблизи резонансной частоты характеристики скорость-частота , что является принципиально необходимым для увеличения КПД, а также по той причине,
0 что некоторые типы пъезодвигателей начинают работать неустойчиво в результате параметрического возбуждения паразитных механических колебаний ПР, если рабочая частота далека от резонанса. Корректирующие уст5ройства 10,12 и 14 рассчитаны так, чтобы во время переходного процесса сигналы на выходе фазового детектора 9 не превышали порог срабатывания устройства 15. Аналогичным образом
0 работает система и в том случае, если новое значение нагрузочного момента столь велико, что резонансные свойства характеристики скоростьчастота становятся слабо выражен5ными. Например, при изменении нагрузочного момента до значения М- (см. фиг. 2) рабочая точка из положения 1 перейдет в положение 3
0
Предположим, что в исходном состоянии рабочая точка находится в положении 2 и происходит скачкообразный сброс нагрузки до значения М М,. Непосредственно послесброса нагрузки скорость будет падать, а
5 в ответ на этосигнал на выходе корректирующего устройства 10 стремится уменьшить рабочую частоту, что в свою.очередь будет способствовать уменьшению скорости. В результате
0 сигнал рассогласования на выходе фазового детектора 9 превысит порог срабатывания устройства 15, сработает одновибратор 16 и ключ 11 блокирует прохождение сигнала корректиру5ющего устройства 10 на управляющий вход управителя частоты 3, Настройка управителя частоты при отсутствии сигнала на управляющем входе выбрана таким обра0зом, что рабочая частота автогенератора в этом случае оказывается больше f (см. фиг. 2). Длительность выходного импульса одновибратора пренебрежимо мала по сравне5нию с переходным процессом изменения скорости. Поэтому раз1.«лкание ключа 11 достаточно кратковременно чтобы не приводить к заметным колебаниям скорости. После окончания Iiмпyльca одновибратора 16 ключ 11 замыкается, а процесс регулирование будет происходить :Тсжже, как и в рассмотренном ранее случае скачкооб разного увеличения нагрузки. При этом сигнал на выходе устройства 14, появляницийся во время изменения ра-, бочейчастоты, будет способствовать уменьшению амплитуды возбуждакацего напряжения, так что по окончании пе реходного процесса рабочая точка ока.Порог сра
жется в положении
батывания устройства 15 выбран несколько меньше уровня, соответствую щего допустимому отклонению tскорост от задания. Описанное устройство бе существенных изменений можно использовать в случае выбора в кЯчестве рабочего левого склона характеристики скорость-частота, а также для управления скорости пъезодвигателей с люйлм другим взимным расположением резонансных характеристик скорость-частота и ток пъезорезонатора-частота. Для этого необходимо лишь соответствующим образ задать частоту настройки управителя частоты при отсутствии сигнала на его управляющем входе. По. сравнению с известными устройствами предлагаемое устройство имеет следующиэ .технико-экономические преимущества (по результатам испытаний):
повышение стабильности скорости вращения пъезодвигателя (с погрешностью на уровне 0,1% для средней скорости и 0,01% для мгновенной);
расширение диапазона нагрузочных моментов, внутри которого сохраняется заданная стабильность скорости вращения (от Мхх до примерно Мкз) ;
сохранение работоспособности в широком диапазоне изменения внешних условий (температура, влажность), а также в условиях изменения (на пример, в результате износа) таких внутренних параметров двигателя, как усилие прижима, свойства пъезорезонатора;
увеличение КПД при работе двигаI теля в системе электропривода примерно на 15%.
Использование устройства позволит применить пъезодвигатель в качестве быстродействующего привода в установках разнообразного назначения, например в установках магнитной 3аписи-воспроизведения, что позволит снизить их стоимость, уменьшить габариты, увеличить качество записи-воспроизведения, увеличить надежность.
Формула изобретения Устройство управления пьезоэлектрическим двигателем, содержащее пьезоэлектрический двигатель, датчик ркорости, генератор эталонной частоты, формирователи импульсов, автогенератор, включающий усилитель мощности и пъезорезонатор двигателя, корректирующее устройство,о тличающееся тем, что, с целью повышения КПД и увеличения точности управления скоро стью, в него введены блок вычитания частот, фазовый детектор, сумматор, два дополнительных корректирующих устройства, управитель частоты, ключ аналоговых сигналов, пороговое устройство и одновибратор, при этом выход блока вычитания частот соединен с входом фазового детектора, выход к орого в свою очередь подключи входам основного корректирующего устройства,а также порогового и первого дополнительного корректирующего устройства, причем выход последнего через ключ аналоговых сигналов соединен с управляющим входом управителя частоты, а выход порогового устройства через одновибратор - с упрашляющим входом упомянутого ключа, выход основного корректирующего устройства соединен усилителем мощности через сумматор, другой вход которого через второе дополнительное корректирующее устройство соединен с автогенератором.
Источники информации, принятые во внимание при экспертизе
1.Сандлер А.С., Сарбатов Р.С. втоматическое частотное управление асинхронными двигателями. М.,Энергия, 1974 ., с. 34-158.
2.Сб. Вибротехника. Научные труды ВУЗов Литовской ССР, 1972, 3/16/, с. 296-307 (прототип).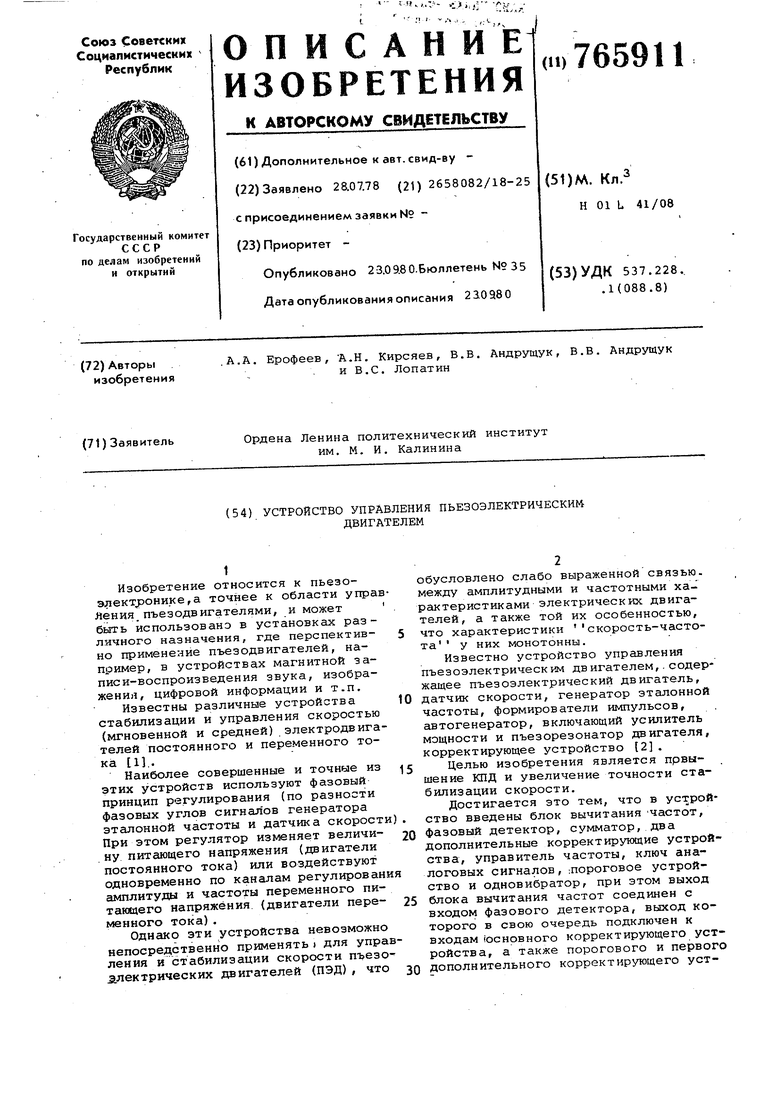
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления пьезоэлектрическим двигателем | 1979 |
|
SU881899A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей | 1980 |
|
SU902189A1 |
| Устройство для согласования угловогопОлОжЕНия СиНХРОННО ВРАщАющиХСяВАлОВ элЕКТРОдВигАТЕлЕй | 1979 |
|
SU834822A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 1991 |
|
RU2025882C1 |
| Фазовый детектор | 1977 |
|
SU656182A1 |
| Способ изготовления эталона для проверки преобразователей угла поворота | 1973 |
|
SU578649A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО РАЗДЕЛЕНИЯ РАДИОИМПУЛЬСОВ ПО НЕСУЩЕЙ ЧАСТОТЕ | 1983 |
|
SU1840996A1 |
| Рентгеновский генератор | 1983 |
|
SU1163491A1 |
| Формирователь сигналов с линейной частотной модуляцией | 1985 |
|
SU1290472A1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1777178A1 |